Основні технічні показники ПР
Захватні пристрої
Деталь утримується силами тертя
Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Точність позиціонування промислового робота. Основні положення
Помилки за рахунок люфтів і зазорів в кінематичних парах
Помилки позиціонування за рахунок неточності виготовлення і зборки
Мікропроцесорні пристрої в сенсорних системах роботів
Програмування обчислювальних пристроїв робототехнічних систем
Гнучкі автоматизовані виробництва
Гнучкі автоматизовані виробництва – як об’єкт моделювання
Засоби пакетування: піддони, стрічки, дроти
Навигация
Основні технічні показники ПР
Промислові роботи
87969
знаков
4
таблицы
42
изображения
До технічних показників ПР відносяться: номінальна вантажопідйомність, робочий простір, зона обслуговування, число ступеней рухомості, швидкість переміщення, похибка позиціювання робочого органу і похибка траєкторії робочого органу.
Під вантажопідйомністю розуміється найбільше значення маси виробів виробництва, при якій гарантується надійна робота ПР.
Простір, в якому може знаходитися виконавчий (робочий) механізм робота при його функціонуванні називається робочим простором.
Зоною обслуговування (робоча зона) називається частина робочого простору, в якій може виконувати роботу ПР.
Число ступеней рухомості робота залежить від його конструкції ходового пристрою (від 1 до 3).
Форми робочих зон
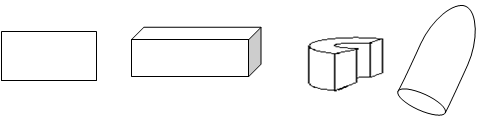 |
плоска просторова циліндрична сферична рис. 2.1
Похибка позиціювання робочого органа ПР - відхилення реального положення робочого органу від заданого програмою.
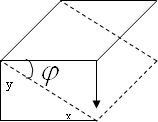 Похибки
Похибки 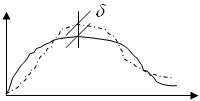 |
рис. 2.2
Відхилення траєкторії робочого органа від заданої програмою називається похибкою траєкторії.
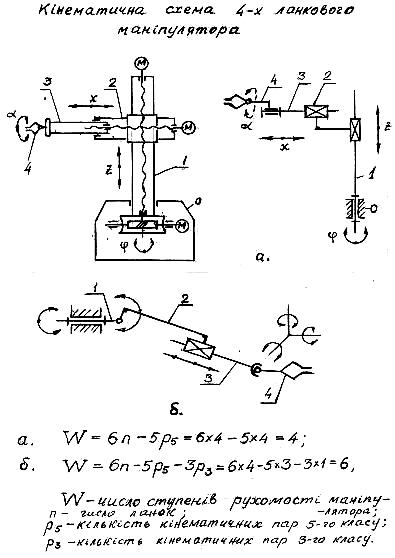
рис. 2.3
3. Типи маніпуляторів
3.1 Структурні і кінематичні схеми маніпуляторів
Механічна система ПР умовно може бути розділена на чотири структурних елементи: 1-основа (нерухома ланка); 2-корпус (портал); 3-механічна рука;
4-захватний пристрій.
Механічна система ПР Кінематична схема маніпулятора
|
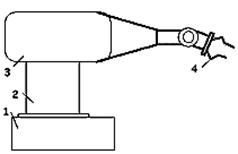
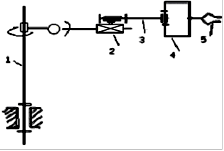
рис.3.1 рис.3.2
Механічна рука і захватний пристрій складають маніпулятор.
Переважне застосування в маніпуляторах одержали кінематичні ланцюги з поступальними і обертовими парами ; сферичні шарніри складні у виконанні і утрудняють (заважають) передачу рухів від приводів, тому застосовуються рідко.
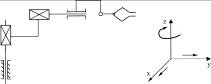
Схеми маніпуляторів
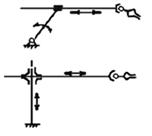
рис.3.3
На рис.3.3 показані схеми маніпуляторів для одержання рухів в базовій площині
З допомогою маніпуляторів розв'язують ряд задач в різних областях науки і техніки (робота в небезпечних і шкідливих для людини зонах; трудоємкі і монотонні роботи: зварка, фарбування, зборка та інші).
3.2 Класифікація маніпуляторів
Класифікуються маніпулятори за такими признаками:
1. По характеру виконуючих робіт:
а)універсальні;
б)спеціальні.
2. По способу керування:
а)з ручним (копіруючі);
б)з автоматичним управлінням (по програмі ЕОМ).
Універсальні М. застосовуються для виконання підйомно-транспортних робіт в машинобудуванні, а також для механізації операцій по обслуговуванні технологічного обладнання (установки і знімання деталей на металорізальних верстатах, зварочні і свердлильні операції).
Спеціальні М. застосовуються:
- в ковальсько-пресових цехах;
- в ливарному виробництві.
3.3 Технічні показники маніпуляторів
Працездатність маніпуляторів характеризується рядом технічних показників: робочий об'єм, маневреність М., кут і коефіцієнт сервісу, число ступеней свободи, вантажопідйомність, швидкість руху, енергетичні показники .
Незамкнутий кінематичний ланцюг маніпулятора дозволяє захвату займати різні положення в деякому об'ємі, який називається робочим .
Тобто об'єм обмежений поверхнею, яку огинає всі можливі положення захват. Частина робочого об'єму, в якому М. може виконувати операції з об'єктом маніпулювання, називається робочою зоною.
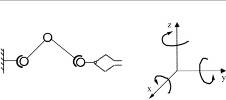
1.Маніпулятор з 2-ма сферичними кінематичними парами і однією обертовою.
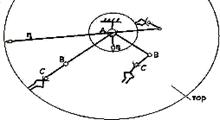
рис. 3.4
2. Маніпулятор з 2-ма поступальними і 1- обертовою
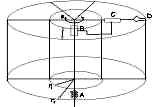
рис. 3.5
Маневреність маніпулятора - це рухомість механізму при нерухомому (фіксованому) положенні захвата. Цей показник характеризує можливість обходу рукою М. перешкод в робочому об'ємі і виконання складних операцій.
Ступінь рухомості маніпулятора визначається по формулі Сомова-Малишева
W=6n-5p![]() -4p
-4p![]() -3p
-3p![]() -2p
-2p![]() -p
-p![]()
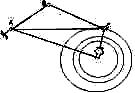
рис. 3.6
Маневреність маніпулятора рівне одиниці, означає можливість спільного обертання ланок 1і 2 навколо вісі АС, яка проходить через центри сфер (рис.3.6)
При роботі маніпулятора захват повинен мати різні можливості переміщення відносно об'єкта, але конструктивні обмеження (форма, розміри) не дозволяють прововодити захват в кожній точці робочого простору під довільними кутами.
Тілесний кут ψ - всередині якого захват може підійти до кожної точки робочої зони , називають просторовим кутом обслуговування , або кутом сервісу .
Відношення кута ψ до його найбільшого значення називають коефіцієнтом сервіса в даній точці : θ=ψ/(4π) , 0≤θ≤1 .
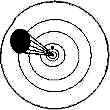
рис. 3.7
Структурні схеми маніпуляторів і їх робочі зони в системі координат
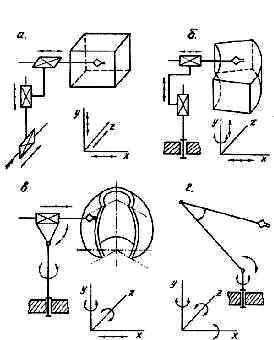
рис. 3.8
3.4 Автооператори
АО - це маніпулятор , який застосовується в машинах-автоматах , які працюють по жорсткій програмі і оперують штучними об'єктами по загальному циклу машини.
Програмоносіями для АО служать кулачки, перфострічки, магнітні стрічки.
Області застосування АО :
1. Автооператор заливщик для машин литва під тиском .
2. Автооператор для змазки прес-форм машин литва під тиском .
3. Автооператор для обслуговування листоштамповочних пресів .
4. Автооператор для установки і знімання деталей при обслуговуванні металорізальних верстатів .
4. Конструкції промислових роботів.
4.1 Конструктивна схема ПР
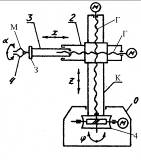
рис. 4.1.
М![]() … М
… М![]() - електродвигуни ;М
- електродвигуни ;М![]() - пневмопривід ;
- пневмопривід ;
Механізми :Черв'ячна передача – Ч; Передача гвинт-гайка – Г; Зубчасті механізми – З; Основа механічної системи – О;Корпус – К; Маніпулятор – М; Система керування – У.
4.2 Технічні характеристики ПР
1. Модель . 7. Спосіб програмування .
2. Вантажопідйомність . 8. Помилка позиціювання .
3. Число степеней рухомості . 9. Лінійні і кутові переміщення .
4. Число рук (захватних пристроїв). 10. Швидкість переміщення .
5. Привід . 11. Габаритні розміри .
6. Тип системи керування . 12. Маса.
4.3 Системи координат

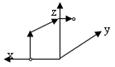
прямокутна плоска прямокутна просторова
(Декартова) (Декартова)


циліндрична сферична
4.4 Приклади структурних кінематичних схем ПР
1. Прямокутна плоска система координат:
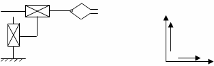
2. Прямокутна просторова (Декартова):
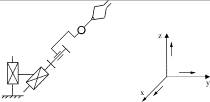
3. Полярна циліндрична :
4. Полярна сферична :
4.5 Типи ПР
Характерні представники конструктивних груп :
1. Напольні ПР.
2. Підвісні ПР тельферного типу .
3. ПР мостового типу .
4. Спеціальні ПР: а) крокуючі; б) підводні; в) космічні.
5. ПР агрегатно-модульного типу .
Проектування нових моделей на базі уніфікованих агрегатних вузлів і блоків (модулів) забезпечує створення широкого діапазону конструкцій ПР з технічними параметрами, які відповідають вимогам конкретного споживача (виробника). Переваги методу А-М побудови: скорочення часу і трудомісткості проектування і можливість виготовлення ПР. При побудові конструкцій ПР застосовуються принципи уніфікації і нормалізації як при розробці механічної системи так і системи управління . Класифікуються агрегатно-модульні конструкції ПР по таким признакам: компоновці, по можливості зміни технічних характеристик ПР, по застосуванню систем керування.
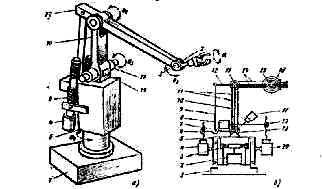
рис. 4.2
Компоновка (а) та кінематична схема (б) промислового робота “Asca 1 Rb-6”:
1-основа; 2,4,17,20-електродвигуни з друкованим якорем та вбудованим редуктором; 3-хвильова передача; 6,18-кулькові гвинтові пари; 5-поворотний корпус; 7-тяга; 8-зрівноважуючий вантаж; 9,10,12-ланки руки; 11-14-тяги; 13,15,19-кривошипи; 16-конічна передача.
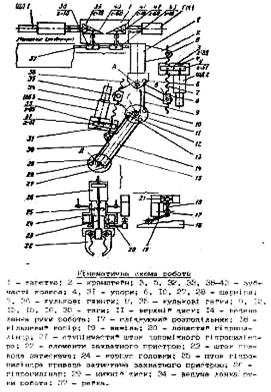
рис.4.3
Похожие работы
... і були передані і Торські соляні промисли. На перших порах вони знаходилися у віданні Помісного приказу, а згодом були передані Соляному управлінню, що в 1725 р. перейменували в Головну соляну контору. У її віданні соляні промисли Донеччини знаходилися до кінця ХVІІІ ст. З переходом Бахмутських і Торських соляних промислів у відання казни уряд намагається розширити на них виробництво казенної сол ...




... та технікою виконання відзначаються вишивки майстринь Г. Касіян з Трубчина, Г. Вальчук та Г. Сарахман з Дністрового, В. Шпак з Кудринець цього району. Таким чином, народні промисли і ремесла Тернопільщини займають важливе місце у естетичному вихованні молодших школярів. Розділ 2. Використання народних промислів і ремесел в естетичному вихованні учнів початкових класів 2.1 Особливості ...
... - можна характеризувати на даний час як післякризовий та такий, що потребує цільової державної підтримки. 2. Сучасний рівень розвитку текстильної промисловості 2.1 Текстильна промисловість України в сучасних умовах господарювання За випуском продукції (48%), вартістю основних виробничих фондів перше місце в комплексі займає текстильна промисловість. Проте в останні роки спостерігається ...
... на основі лісового господарства країни. Залежно від кількості лісових ресурсів, наявних у країні, створюється ресурсна база, яка в подальшому і сприяє розвитку галузі. Лісова та лісопереробна промисловість має розгалужену структуру, зокрема, вона включає лісозаготівельну, деревообробну, лісохімічну та целюлозно-паперову промисловості. Найбільшу частку промисловості становить меблева промисловість ...
0 комментариев