Основні технічні показники ПР
Захватні пристрої
Деталь утримується силами тертя
Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Точність позиціонування промислового робота. Основні положення
Помилки за рахунок люфтів і зазорів в кінематичних парах
Помилки позиціонування за рахунок неточності виготовлення і зборки
Мікропроцесорні пристрої в сенсорних системах роботів
Програмування обчислювальних пристроїв робототехнічних систем
Гнучкі автоматизовані виробництва
Гнучкі автоматизовані виробництва – як об’єкт моделювання
Засоби пакетування: піддони, стрічки, дроти
Навигация
Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Промислові роботи
87969
знаков
4
таблицы
42
изображения
5.3.3 Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Контакти
1. Лінійний σ=0.418![]()
![]() ,
,

2. Лінійний σ=0.418![]()
![]() ,
,

3. Лінійний σ=0.418![]() ,
,

Точковий σ=0.418m![]() ,
,

l-ширина губки захвата; N-сила, яка діє в місці контакту захвата з заготовкою; Е![]() - приведений модуль пружності матеріалів губки захвату і заготовки (деталі); d-діаметр заготовки (деталі) ; r-радіус губок захвату ; m-коефіцієнт, який залежить від співвідношення
- приведений модуль пружності матеріалів губки захвату і заготовки (деталі); d-діаметр заготовки (деталі) ; r-радіус губок захвату ; m-коефіцієнт, який залежить від співвідношення
![]() ; E
; E![]() =
=![]() ,
,
![]() 1 0,8 0,60,4 0,2 0,1 0,05
1 0,8 0,60,4 0,2 0,1 0,05
m 0,39 0,42 0,47 0,54 0,72 0,97 1,98
Визначення напружень на поверхнях контакту ЗП з об'єктами маніпулювання необхідне як при розрахунку ЗП, так і для встановлення можливості пошкодження об'єкта при його захваті і утриманні. Контактні напруження σ![]() мають бути менші допустимих [σ]. (σ
мають бути менші допустимих [σ]. (σ![]() <[σ
<[σ![]() ]).
]).
6. Приводи і елементи автоматики ПР
6.1 Загальні відомості. Класифікація приводів
Вибір типу привода залежить від функціонального призначення ПР, умов експлуатації, вантажопідйомності, динамічних характеристик і виду системи керування.
До привода пред'являються такі вимоги:
1.Мінімальні габарити. 2. Високі енергетичні показники. 3. Можливість роботи в режимі автоматичного керування (тобто забезпечення оптимальних законів розгону і гальмування при мінімальному часі перехідних процесів). 4. Швидкодія — здійснення рухів виконавчих механізмів (М) з високими швидкостями і малою похибкою позиціювання. 5. Високий ККД. 6. Забезпечення безпечних умов праці. 7. Можливість встановлення систем охолодження і терморегулювання. 8. Надійність і довговічність елементів конструкції. 9. Зручність монтажу, обслуговування, ремонту і переналадки.
Класифікація приводів:
1. В залежності від виду енергії , яка використовується для руху робочого механізму привода: пневматичні, гідравлічні, електромеханічні і комбіновані.
2. По способу відліку координат:
- з відносним відліком координат — по приростам (кроковий двигун);
- з абсолютним відліком координат (електропривод з зворотнім зв'язком) .
6.2 Елементи автоматики ПР
Елементи автоматики забезпечують роботу ПР в автоматичному режимі. Більшість елементів автоматики розміщуються в електричному шкафу ПР. В склад автоматики входять датчики різних типів (шляхові вимикачі, реле і ін.). Вони забезпечують контроль робочих параметрів ПР. Це датчики для обмеження переміщень ланок механічної системи, для фіксації вихідного положення ланок (процес захвату і розжиму об'єктів захватного механізму).
Вибір типів датчиків залежить від умов їх роботи. Захист від коротких замикань і перегріву електроапаратів, виконують автоматичні вимикачі, реле і запобіжники .
6.3 Електромеханічний привод
В склад приводу входять підсилювачі потужності, електродвигуни, передаточні механізми, датчики зворотного зв'язку.
Застосовуються електродвигуни загального призначення (асинхронні, постійного струму), а також спеціальні — крокові. Кроковий двигун має дві модифікації: поворотний, лінійний.
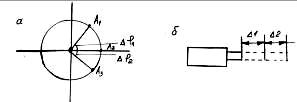
рис. 6.1
Електричні приводи класифікуються:
1. По роду передаточного пристрою: редукторні; безредукторні.
2. По степені управління: регулюючий; програмно-керуючий; слідкуючий; адаптивний.
3. По рівню автоматизації: автоматизований (оператор); автоматичний (без оператора).
Схема автоматизованого електромеханічного приводу:
![]()
системакроковий редуктор виконавчий керування двигун механізм
6.4 Гідропривід
Широке запровадження гідропривода в робототехніці визвано такими його перевагами:
1. Швидкодія.
2. Можливість безступінчастого регулювання швидкості вихідної ланки в автоматичному режимі.
3. Великий коефіцієнт підсилення по потужності (великі сили може передавати гідропривід).
4. Простота конструкції, висока надійність.
Недоліки:
1. Можливість витоку робочої рідини через ущільнення приводу.
2. Необхідність застосування пристроїв для охолодження (підігріву) робочої рідини.
В гідропривіді застосовуються такі основні типи гідродвигунів:
¾Лінійні гідроциліндри;
¾Поворотні гідродвигуни (гідромотори).
Типи лінійних гідроциліндрів: ЦРГ ![]()
П — діаметр поршня; Ш — діаметр штока; х — хід поршня, мм.
Типи гідродвигунів: ДДТ-16 (М→16, кГм) , ДПГ-63 (М→66,кГм),
ДПГ-125.
Типи гідромоторів : Г15-21Н.
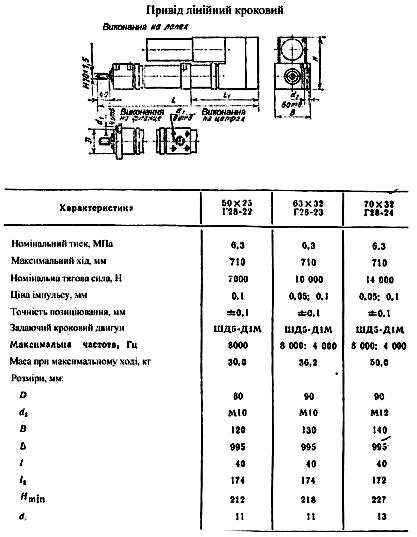
Привід поворотній кроковий: 32Г18-22 .
Привід лінійний кроковий: Г28-22.
6.5 Пневмопривод
Одержав широке застосування в конструкціях ПР вантажопідйомністю до 20 кг. Це зумовлено такими перевагами: 1. Простота і надійність конструкції. 2. Висока швидкість вихідної ланки. 3. Можливість використання енергії стиснутого повітря із заводської системи (повітряної магістралі). 4.Можливість використання в агресивних і пожежонебезпечних середовищах. 5. Високий ККД. 6. Невисока вартість конструкції і малі витрати на обслуговування .
Недоліки :
- Необхідність застосування спеціальних конструкцій позиційних пристроїв.
- Низька питома потужність (висока ступінь стиску повітря).-Шум при роботі.
В склад пневмоприводу входять:
1. Циліндри пневматичні типу ЦРГП.
2. Поворотні пневмодвигуни типу ПДП.
3. Цифрові багатопозиційні лінійні пневмоприводи.
4. Цифрові багатосекційні ротаційні пневмоприводи.
6.6 Комбіновані приводи
Електрогідравлічний привод:
¾Привід позиційного типу;
¾Кроковий привод.
Схема електрогідравлічного привода:
![]()
(система керування)
7 Системи керування ПР та інформаційні системи
7.1 Класифікація СК ПР
Системи керування класифікують за такими признаками:
1. По способу позиціювання:
- позиційні (малоточкові, багатоточкові);
- контурні;
- комбіновані
2. По виду енергоносія:
- механічні;
- гідропневматичні;
- електричні.
3. По способу представлення (подання) інформації:
- електромеханічні;
- числові;
- гібридні
- циклові;
- аналогові;
4. По типу програмоносія:
- з перфострічкою;
- з магнітним барабаном;
- з оптичним диском;
- з магнітною стрічкою;
- з магнітним диском (дискета);
5. По об'єму інформації в управляючій програмі:
- жорстко програмні;
- адаптивні.
6. По способу програмування:
- методом розрахунку (складання програм);
- методом навчання;
- самонавчаємі.
У позиційних СУ задаються початкові і кінцеві положення робочих органів. В малоточкових - число точок позиціювання - до 10. Багатоточкових - до 100.
7.2 Види систем керування
- автономна;
- комплексна;
- багаторівнева.
Найбільше застосування для керування ПР знайшли автономні системи СУ спеціального призначення. Випускаються серійно - уніфіковані системи управління ПР - УЦМ устройство уніфіковане циклове модульне, УПМ - устройство уніфіковане позиційне модульне, УКМ устройство уніфіковане контурне модульне.
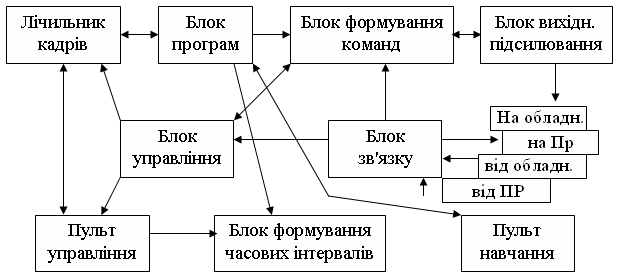
1. Малоточечні циклові системи позиційного управління - УЦМ.
2. Числові системи позиційного управління - УПМ.
3. Системи контурного управління серії УКМ.
Система управління (тип 1) призначені для ПР, які обслуговують ковальсько-пресового обладнання, ливарне виробництво, лінії гальванічні та металорізальні верстати в умовах великосерійного виробництва.
Структурна схема УЦМ.
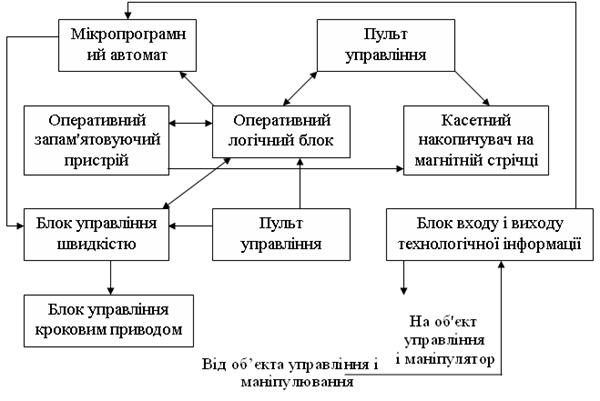
Система позиційного управління (тип 2) призначені для управління (керування) ПР із значним (великим більше 10) числом точок позиціювання. Застосування - обслуговування підйомно-транспортних операцій, нескладних складальних робіт і операцій контактної точкової зварки.
Структурна схема УПМ.
Системи контурного управління (тип 3) призначені для керування ПР, які вимагають складного просторового переміщення виконавчого механізму по заданій траєкторії. Застосування - дугова зварка, складні складальні операції.
Комплексні СУ призначені для управління комплексами обладнання - робот. Використовуються в системах металорізальних верстатів (ЧПУ) - числове програмне управління.
Багаторівневі системи числового управавління роботами застосовуються при обслуговуванні верстатів автоматизованих участків цехів. (Економічно не завжди доцільно).
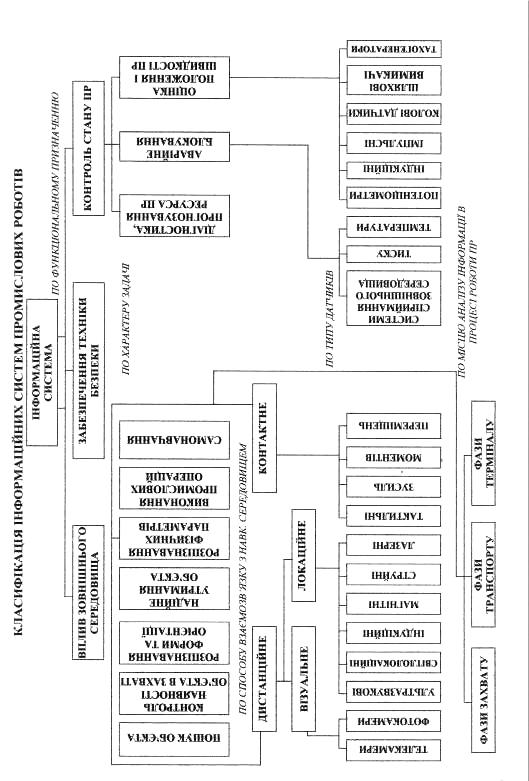
7.3 Класифікація інформаційних систем
Інформаційні системи в значній мірі визначають функціональні можливості ПР, складність задач, експлуатаційну надійність і ефективне використання їх в виробничих умовах, а також вони являються важливими ланками в забезпеченні безпеки обслуговуючого персоналу.
| 1. В залежності від функціонального призначення, інформаційні системи класифікують (розділяють): Система сприймання і контролю інформації про зовнішнє середовище. 1.2 Система забезпечення техніки безпеки. 1.3 Система контролю технічного стану ПР. 2. По характеру завдань, які розв'язуються ПР. Системи: 2.1 Пошуку об'єкта. 2.2 Контролю наявності об'єкта в захваті (ЗП). 2.3 Виявлення форми і орієнтації. 2.4 Надійного тримання об'єкта. 2.5 Визначення фізичних параметрів. 2.6 Виконання виробничих операцій. 2.7 Самонавчання. 2.8 Діагностики ПР. 2.9 Аварійного блокування. 2.10 Оцінки положення і швидкості об'єкта. 3 По способу взаємодії із зовнішнім середовищем: 3.1 Дистанційні. 3.2 Контактні. 3.3 Візуальні. 3.4 Локаційні. | 4. По характеру датчиків. Системи: 4.1 З телекамерами. 4.2 З фотодатчиками 4.3 Ультразвукові. 4.4 Світлолокаційні. 4.5 Індукційні. 4.6 Магнітні. 4.7 Струменеві. 4.8 Лазерні. 4.9 З датчиками сил. 4.10 З датчиками моментів. 4.11 З датчиками переміщень. 4.12 З датчиками тисків. 4.13 З датчиками температури. 4.14 З потенціометрами. 4.15 З імпульсними генераторами. 4.16 З кодовими датчиками. 4.17 З шляховими вимикачами. 4.18 З тахогенераторами. |
7.4 Приклади застосування датчиків в інформаційних системах
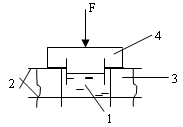
1. Датчик тиску.
1- електропровідник;
2- виводи електрода;
3- пружня оболонка;
4- поршень.
Зміна в тілі тиску приводить до зміни опору струмопровідного полімера.
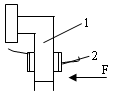
2. Датчик сил (моментів).
1- тензобалка;
2- електротензометри опорів.
Зовнішня сила F приводить до деформації (згину) балки, яка регіструється електротензометрами опорів.
3. Датчик переміщення.
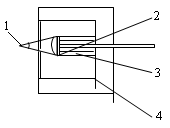
1- сапфіровий сердечник;
2- п'єзокерамічний датчик;
3- амортизатор;
4- металічний корпус.
Принцип дії - мікронерівності поверхні предмета при його переміщенні викликають появу електричного сигналу на виході п'єзоелектрика.
4. Світлолокаційний датчик.

Принцип дії - перекриття світлового потоку об’єктом.
5. Ультразвуковий датчик.
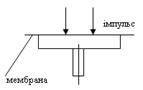
рис.7.5.
Принцип дії – реєстрація ультразвукових імпульсів мембрани.
6. Струменеві датчики.
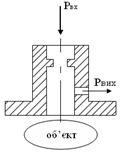
рис.7.6.
Принцип дії - оснований на взаємодії потоку повітря з сопла з предметом, або на перериві струї повітря з предметом.
Похожие работы
... і були передані і Торські соляні промисли. На перших порах вони знаходилися у віданні Помісного приказу, а згодом були передані Соляному управлінню, що в 1725 р. перейменували в Головну соляну контору. У її віданні соляні промисли Донеччини знаходилися до кінця ХVІІІ ст. З переходом Бахмутських і Торських соляних промислів у відання казни уряд намагається розширити на них виробництво казенної сол ...




... та технікою виконання відзначаються вишивки майстринь Г. Касіян з Трубчина, Г. Вальчук та Г. Сарахман з Дністрового, В. Шпак з Кудринець цього району. Таким чином, народні промисли і ремесла Тернопільщини займають важливе місце у естетичному вихованні молодших школярів. Розділ 2. Використання народних промислів і ремесел в естетичному вихованні учнів початкових класів 2.1 Особливості ...
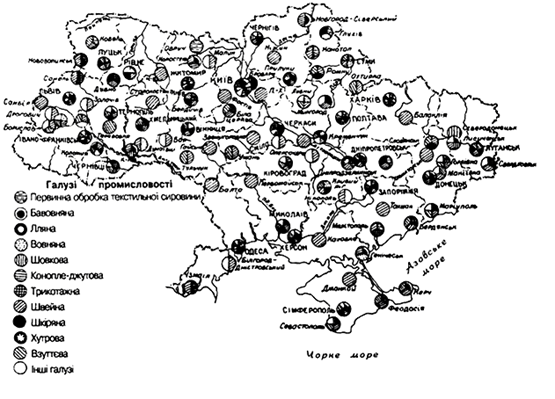
... - можна характеризувати на даний час як післякризовий та такий, що потребує цільової державної підтримки. 2. Сучасний рівень розвитку текстильної промисловості 2.1 Текстильна промисловість України в сучасних умовах господарювання За випуском продукції (48%), вартістю основних виробничих фондів перше місце в комплексі займає текстильна промисловість. Проте в останні роки спостерігається ...
... на основі лісового господарства країни. Залежно від кількості лісових ресурсів, наявних у країні, створюється ресурсна база, яка в подальшому і сприяє розвитку галузі. Лісова та лісопереробна промисловість має розгалужену структуру, зокрема, вона включає лісозаготівельну, деревообробну, лісохімічну та целюлозно-паперову промисловості. Найбільшу частку промисловості становить меблева промисловість ...
0 комментариев