Основні технічні показники ПР
Захватні пристрої
Деталь утримується силами тертя
Формули для розрахунку контактних напружень при захваті заготовки (деталі) губками ЗП
Точність позиціонування промислового робота. Основні положення
Помилки за рахунок люфтів і зазорів в кінематичних парах
Помилки позиціонування за рахунок неточності виготовлення і зборки
Мікропроцесорні пристрої в сенсорних системах роботів
Програмування обчислювальних пристроїв робототехнічних систем
Гнучкі автоматизовані виробництва
Гнучкі автоматизовані виробництва – як об’єкт моделювання
Засоби пакетування: піддони, стрічки, дроти
Навигация
Захватні пристрої
Промислові роботи
87969
знаков
4
таблицы
42
изображения
5. Захватні пристрої
5.1 Класифікація захватних пристроїв
Захватні пристрої (ЗП) маніпуляторів служать для захвату і утримання в певному (конкретному) положенні об'єктів маніпулювання. Ці об'єкти можуть мати різні розміри, форму, масу і характеризуватися різними фізичними властивостями.
Прикладами ЗП являються: монтажні інструменти (тиски, ключі і ін.)
До ЗП ставляться певні вимоги: загального характеру і спеціальні, зв'язані з конкретними умовами праці.
До числа обов'язкових вимог відносяться : надійність захвату і утримання об'єкту, стабільність базування, недопустимість пошкоджень або руйнування об'єктів, міцність деталей ЗП.
Спеціальні вимоги : можливість захвату і базування деталей в широкому діапазоні (маси, розмірів і форми), легкість і бистрота заміни елементів ЗП, необхідність автоматичної зміни зусиль утримання об'єкта в залежності від його маси.
В теперішній час ведуться розробки конструкцій ЗП, які можуть захвачувати і базувати неорієнтовано розміщені об'єкти.
Класифікація ЗП ведеться по ряду признаків:
1. По способу захвату і утримання об'єкта маніпулювання - механічні, пневматичні (вакуумні), електромагнітні і комбіновані.
2. По виду управління (керування) - некеровані, командні, жостко-програмні, адаптивні (чуттєві).
3. По характеру базування: спроможні (здатні) до перебазування - можуть захвачувати і утримувати об'єкти з широким діапазоном геометричних і фізичних параметрів; центруючі - пристосовані до захвату і утримання об'єктів за обмежену номенклатуру поверхонь, які відрізняються формою і розмірами; базуючі - спеціалізовані, приспособлені до захвату і утримання групи об'єктів, які мають однорідні конструктивно-технологічні параметри; фіксуючі - спеціальні - забезпечують захват і утримання одного виду об'єктів маніпулювання.
4. По числу робочих позицій: однопозиційні, багатопозиційні.
5. По характеру кріплення: незмінні, змінні, швидкозмінні, автоматизовані.
6. По робочому діапазону - широкодіапазонні - можуть удержувати об'єкти в широкому діапазоні розмірів поверхонь захвату ; вузькодіапазонні - можуть удержувати об'єкти в обмеженому діапазоні розмірів поверхонь захвату.
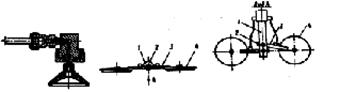
5.2 Будова захватних пристроїв і принцип дії. Механічні ЗП некеровані
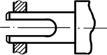
Виконуються у вигляді пінцетів, розрізних пружніх валиків і втулок (цанг) або тисків з одною або двома рухомими губками, які знаходяться під дією пружин.
пружній валик цанга тиски


|
|
| ||||||
рис.5.1
Розжим робочих елементів таких ЗП проходить при контакті з заготовкою, внаслідок чого можуть бути пошкоджені поверхні деталей або зажимних елементів (недолік). Ці ЗП застосовують в умовах масового виробництва при маніпулюванні з об'єктами невеликих мас і габаритів.
Непривідні ЗП із стопорними механізмами забезпечують чергування циклів зажиму і розжиму деталей, не потребують спеціальних команд від системи керування і додаткової енергії. Деталі утримуються силою пружин внаслідок ефекту самозатягування. Як правило, робота таких ЗП можлива тільки при їх вертикальному положенні.
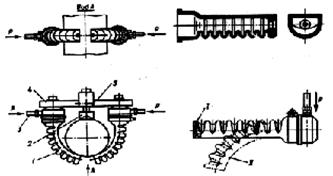
Командні ЗП. Широко розповсюджені конструкції тискового типу (обценьки). Рух губок забезпечується пневмо-, гідро-, або електроприводом.
ЗП з важільними передаточним механізмом і пневмо-гідро приводом.
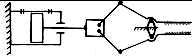
рис.5.2
Центруючі ЗП з рейковим передаточним механізмом.
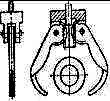
рис.5.3
ЗП з розширяючими еластичними камерами.
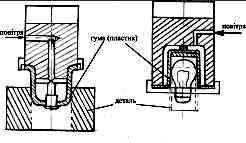
рис.5.4
Застосування таких пристроїв обумовлено кригкістю матерії і складною конфігурацією поверхонь багатьох деталей.
Вакуумні, з згинаючими еластичними камерами і електромагнітні ЗП.
пневмоприсоска елементи кріплення вакуумного з кульовою опороюзахватного пристрою
Захватний пристрій із згинаючими еластичними камерами для захвату виробів за зовнішню поверхню: за внутрішню поверхню:
1-еластичні камери; 2-базуючаІ, ІІ-форми, які приймає камера в призма; 3-патрубки; 4-корпус; залежності від тиску стиснутого 5-різьбовий держакповітря
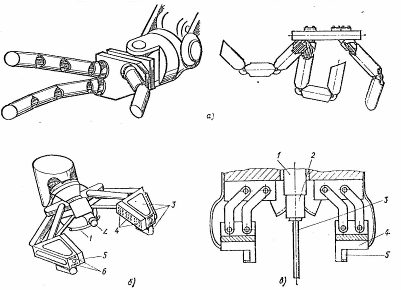
рис.5.7
Адаптивні захватні пристрої:
а-трьохпалі з активним тросовим механізмом привода ланок; б-адаптивний; в-з тактильним щупом;
5.3 Розрахунок захватних пристроїв
5.3.1 Задачі розрахунку
Механічні ЗП. Розрахунок включає:
1. Визначення сил, які діють в місцях контакту заготовки і губок елемента ЗП.
2. Визначення сил привода.
3. Перевірка відсутності пошкоджень поверхні деталі при захваті.
4. Розрахунок на міцність деталей ЗП.
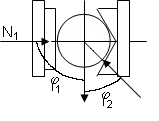
По першому випадку розрізняють такі схеми утримання об'єктів в механічних ЗП :
1. Деталь підтримується губкою елемента ЗП, сили тертя мало впливають на механізм утримання деталі.

рис.. 5.8
N![]() =R
=R![]() [sinφ
[sinφ![]() -μcosφ
-μcosφ![]() ]/[sin(φ
]/[sin(φ![]() + φ
+ φ![]() )-2μcos(φ
)-2μcos(φ![]() +φ
+φ![]() )],
)],
де i, j = 1,2, i ≠ j ;
μ - коефіцієнт тертя губки захвату з деталлю,
негартована сталь μ = 0.12 … 0.15 - Сталь 45, 50;
гартованна сталь μ = 0.3 … 0.35 - сталі 65Г У10А
2.
 |
Деталь утримується завдяки запираючій силі губок.
φ![]() = 90˚,
= 90˚,
φ![]() = φ.
= φ.
R![]() N
N![]()
N![]() =R
=R![]() (sinφ-μcosφ)/(cosφ+2 μsinφ),
(sinφ-μcosφ)/(cosφ+2 μsinφ),
N![]() =R
=R![]() /(cosφ+2μsinφ).
/(cosφ+2μsinφ).
Похожие работы
... і були передані і Торські соляні промисли. На перших порах вони знаходилися у віданні Помісного приказу, а згодом були передані Соляному управлінню, що в 1725 р. перейменували в Головну соляну контору. У її віданні соляні промисли Донеччини знаходилися до кінця ХVІІІ ст. З переходом Бахмутських і Торських соляних промислів у відання казни уряд намагається розширити на них виробництво казенної сол ...




... та технікою виконання відзначаються вишивки майстринь Г. Касіян з Трубчина, Г. Вальчук та Г. Сарахман з Дністрового, В. Шпак з Кудринець цього району. Таким чином, народні промисли і ремесла Тернопільщини займають важливе місце у естетичному вихованні молодших школярів. Розділ 2. Використання народних промислів і ремесел в естетичному вихованні учнів початкових класів 2.1 Особливості ...
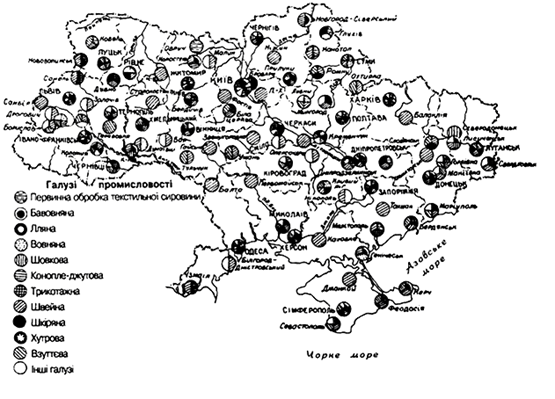
... - можна характеризувати на даний час як післякризовий та такий, що потребує цільової державної підтримки. 2. Сучасний рівень розвитку текстильної промисловості 2.1 Текстильна промисловість України в сучасних умовах господарювання За випуском продукції (48%), вартістю основних виробничих фондів перше місце в комплексі займає текстильна промисловість. Проте в останні роки спостерігається ...
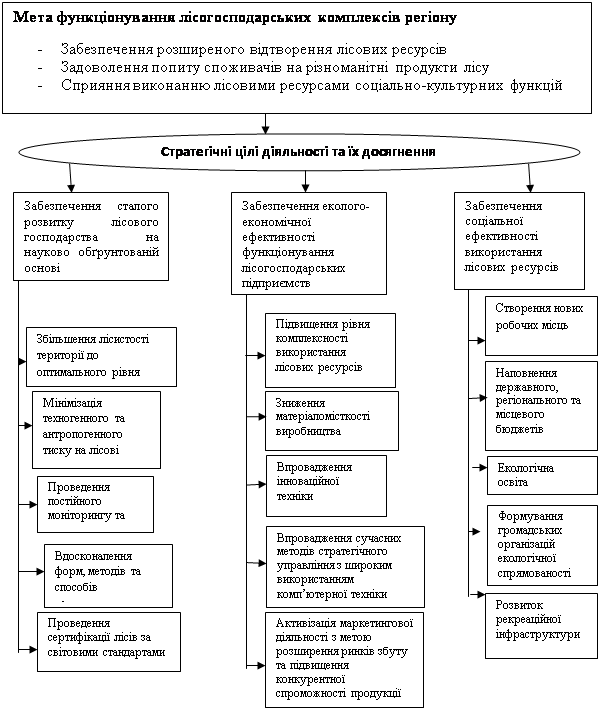
... на основі лісового господарства країни. Залежно від кількості лісових ресурсів, наявних у країні, створюється ресурсна база, яка в подальшому і сприяє розвитку галузі. Лісова та лісопереробна промисловість має розгалужену структуру, зокрема, вона включає лісозаготівельну, деревообробну, лісохімічну та целюлозно-паперову промисловості. Найбільшу частку промисловості становить меблева промисловість ...
0 комментариев