Навигация
2. Силовой расчет механизма
2.1 Исходные данные для силового расчёта механизма
Угловая координата кривошипа для силового расчёта ![]() = 150° Моменты инерции звеньев механизма
= 150° Моменты инерции звеньев механизма ![]() = 403424 кг*м2 ,13s = 1кг*м2 Массы звеньев механизма т1 = 2725кг,т5 = 1095.6кг
= 403424 кг*м2 ,13s = 1кг*м2 Массы звеньев механизма т1 = 2725кг,т5 = 1095.6кг
В заданном положении механизма: угловая скорость
![]()
угловое ускорение
![]()
где ![]() =-175.06н*м - приведённый суммарный момент,
=-175.06н*м - приведённый суммарный момент,
![]() =1985.5кг*м2 – приведенный момент инерции,
=1985.5кг*м2 – приведенный момент инерции,
![]() =154.8кг*м2кг/рад - производная приведённого момента инерции,
=154.8кг*м2кг/рад - производная приведённого момента инерции,
![]() -175.06/1985.5-0.1612*154.8/2*1985.5=0.058рад/с2,
-175.06/1985.5-0.1612*154.8/2*1985.5=0.058рад/с2,
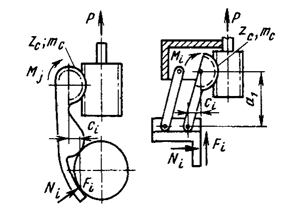
сила сопротивления действующая на звене 5 ![]()
2.1 Построение планов скоростей и ускорений
2.2.1 Построение плана скоростей
Линейную скорость точки A звена 1 находим по формуле для вращательного движения
![]()
На плане скорость ![]() изображается отрезком pvA. Зададимся величиной этого отрезка рVA = 90мм и определим масштаб плана скоростей:
изображается отрезком pvA. Зададимся величиной этого отрезка рVA = 90мм и определим масштаб плана скоростей:
![]() = 1000мм/м*с-1
= 1000мм/м*с-1
Для нахождения скорости точки К звена 3 составим векторное уравнение сложного движения:
![]()
из графического решения этого уравнения устанавливаем значения скорости
![]() мм
мм
![]() мм
мм
Скорость точки D и центра масс звена 3 определяем пропорциональным делением отрезков плана скоростей:
![]()
![]() 105мм
105мм
![]()
![]() 52мм
52мм
![]() м/с
м/с
![]() м/с
м/с
Угловую скорость звена 3 находим по следующей формуле:
![]() 0.042рад/с
0.042рад/с
Для определения скорости точки Е звена 5 составим векторное уравнение сложного движения
![]()
из графического решения этого уравнения находим значения скорости
![]() м/с
м/с
![]() м/с
м/с
2.2.2 Построение плана ускорений
Ускорение точки А звена 1 определяем по формуле вращательного движения
![]()
где ![]() - нормальная составляющая ускорения,
- нормальная составляющая ускорения,
![]() =0.1612*0.54=0.014м/с2 ,
=0.1612*0.54=0.014м/с2 ,
где ![]() - тангенциальная составляющая,
- тангенциальная составляющая,
![]() =0.0031м/с2 ,
=0.0031м/с2 ,
Задаемся величиной отрезка ![]() = 31мм изображающего на плане ускорений тангенциальную составляющую, и устанавливаем масштаб.
= 31мм изображающего на плане ускорений тангенциальную составляющую, и устанавливаем масштаб.
![]() 10000мм/мс-2 ,
10000мм/мс-2 ,
Ускорение точки А звена 3 определяется совместным решением векторного уравнения сложного движения точки К относительно точки А.
![]()
где ![]() - ускорение Кориолиса точки К в относительном движении относительно точки А.
- ускорение Кориолиса точки К в относительном движении относительно точки А.
![]() =2*0.042*0.035=0.003м/с2 ,
=2*0.042*0.035=0.003м/с2 ,
и уравнения вращательного движения звена 3,
![]()
где ![]() - нормальная составляющая ускорения,
- нормальная составляющая ускорения,
![]() 0.0422*1.96=0.005м/с2 ,
0.0422*1.96=0.005м/с2 ,
где ![]() - тангенциальная составляющая,
- тангенциальная составляющая,
Тангенциальные составляющие ускорений найдем из плана ускорений,
![]()
![]() 0.0052
0.0052 ![]() .
.
Ускорение точки D и центра масс звена 3 определим методом пропорционального деления отрезков плана ускорений:
![]()
![]() 92мм
92мм
![]()
![]() 46мм
46мм
![]()
![]()
![]()
![]()
По величине тангенциальной составляющей находим угловое ускорение звена 3
![]() 0.0052/1.96=0.0026рад/с2 ,
0.0052/1.96=0.0026рад/с2 ,
Ускорение точки Е звена 5 определяется из решения векторного уравнения сложного движения точки Е относительно точки D.
![]()
Из плана ускорений
 0.0073
0.0073![]()
![]() =56/10000=0.0056
=56/10000=0.0056![]() .
.
2.3 Определение главных векторов и главных моментов сил инерции
Главные векторы сил инерции
![]()
![]()
Главные моменты сил инерции
Для звена 1![]()
Для звена 3![]()
Похожие работы
... операций . Для рассчитываемой линии суммарное машинное время составляет: мин. Тогда шт/см. По условию требуемая серийная производительность: шт/см. Рассмотрим насколько вариантов компоновок автоматических линий. Для первого варианта используем фрезерно-центровальный станок-полуавтомат, токарные многорезцовые и копировальные станки-полуавтоматы и вертикально-фрезерные полуавтоматы с ...
... рабочей позиции, фиксацию устройства или спутника на рабочей позиции оформляются в виде таблицы 3.1. В данной работе предлагается разработка автоматической линии для осуществления той части техпроцесса, которая связана со сверлильной и фрезерной обработкой поверхностей и отверстий. Таким образом, проектируемая линия должна обеспечивать указанную в задании производительность. Для этого произведем ...

... автооператора строго синхронизировано с работой обслуживаемого оборудования. Автооп-ры могут иметь механические, магнитные, электромагнитные, вакуумные захватные устройства. 11. Транспортно – складские системы автоматизированного производства. Требования, основные виды и примеры исполнений Транспортные устройства автоматизир-ных систем предназначены для перемещения деталей с позиции на позицию ...
... ) при запуске в серийное производство контейнеров с оборудованием. Все это ведет к снижению сроков и затрат на подготовку производства. 5Автоматизированное проектирование деталей крыла В настоящем разделе проекта рассматривается автоматизированное проектирование деталей и узлов с целью увязки конструкции и подготовки информации для изготовления шаблонов, технологической оснастки и самих деталей. ...
0 комментариев