АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
1. АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
1.1 Дизель-потяг з тяговим електроприводом змінного струму як об’єкт керування
У нашому випадку об’єктом керування є дизель-потяг з тяговим асинхронним електроприводом. Згідно [1], асинхронний тяговий електропривод локомотива є складною динамічною системою. Первинним джерелом живлення слугує дизель-генераторна установка. Далі у схему входять: випрямлювач (В); проміжна ланка постійного струму(ПЛПС); автономний інвертор напруги(АІН); тягові асинхронні двигуни(ТАД), крутячі моменти яких передаються механічній передачі(МП) та навантаженню(Н) (локомотиву та потягу) через контакт колесо-рельс; сигнали керування для генератору та інвертору формуються під контролем мікропроцесорної системи керування(СК), що обробляє сигнали з датчиків.
Енергетична система дизель-потяга може біти віднесена до класу багатозв’язкових нелінійних об’ктів керування. Для таких об’єктів керування відсутні єдині підходи синтезу регуляторів, що забезпечують необхідні показники якості підтримання вихідних змінних у широкому діапазоні зміни обурюючих впливів та умов експлуатації.
Визначним фактором при керуванні технологічними процесами в об’єктах з асинхронними електроприводами є регулювання швидкості їхніх двигунів. З позиції теорії електричних машин та електропривода основними та найбільш економічним засобом регулювання швидкості асинхронного двигуна є частотне керування. Можливість керування швидкістю локомотива шляхом зміни частоти крутіння короткозамкнених асинхронних двигунів була доведена одразу після їхнього винаходження [2,8]. Реалізувати цю можливість вдалося лише з появою силових напівпровідникових пристроїв – спочатку тиристорів, а пізніше – транзисторів IGBT [3,11], що складають основу перетворювачів частоти. Перетворювачі частоти з мікропроцесорною системою керування мають велику кількість функцій, що вільно програмуються та автоматично виконуються. Для даного об’єкта особливий інтерес представляють та можуть бути використані:
- частотні пуск та останов двигуна з оптимальним за часом розгоном та гальмуванням;
- повне керування моментом у всьому діапазоні частот;
- векторне керування двигуном (при розімкнутій системі керування);
-ПІД-регулювання керованого технологічного параметру (при замкненій системі з датчиком цього параметру).
Дійсного часу у всьому світі в асинхронному електроприводі широко реалізується частотний спосіб керування, який сьогодні розглядається не лише з точки зору економії вжитої енергії, але й з точки зору вдосконалення систем керування.
Таким чином, питанням автоматизації процесів керування в об’єктах залізничного транспорту, зокрема за допомогою асинхронних електроприводів та їхніх систем керування, приділяється значна увага як в Україні, так і в країнах ближнього та дальнього зарубіжжя. При цьому розглядаються питання дослідження різноманітних засобів покращення якості технологічного процесу шляхом вдосконалення самих пристроїв керування, а також допоміжних пристроїв (вимірювальних датчиків, перетворювачів сигналів та ін.), створення систем керування, що забезпечують функціонування об’єкта згідно заданому критерію якості, регулювання швидкості об’єкта шляхом зміни частоти та діючої напруги живлення тягових асинхронних двигунів з використанням як відомих законів керування, так і синтезованих на основі сучасної теорії автоматичного керування, реалізації пристроїв керування з використанням засобів мікропроцесорної техніки.
1.2. Аналіз методів та критеріїв якості, що використовуються для розробки систем керування об’єктами залізничного транспорту.
При розробці систем керування можна виділити два етапи. Перший – пов’язаний з вибором або синтезом структури системи керування, виходячи з можливостей отримання достовірної інформації про використовувані вихідні величини, що поступають з вимірювальних датчиків, збурюючих впливів та характеристик керуючих дій на об’єкт керування. Другий етап пов’язаний з визначенням параметрів елементів системи керування.
Структурний синтез САК базується, як правило, на відомих аналогах , а також на теоретичних розробках І.О. Вишнеградського, А. Стодоли, Д.К. Максвелла, О.М. Ляпунова, Л.С. Понтрягіна, О.М. Лєтова, А.І. Лур’є, Р. Бєллмана, Р.Е. Калмана, М.А. Айзермана, О.А. Фельдбаума, О.О. Красовського, М.М. Красовського та інших, хто заклали основи теорії автоматичного регулювання та сучасної теорії автоматичного керування та обґрунтували основні принципи побудови систем регулювання [4-6].
Таким чином, проблеми, які з’являються у конструктора при розробці визначеної системи керування(СК) – це проблема вибору методу синтезу, для визначення структури СК та критерію, згідно якого буде оцінюватися якість процесів, що протікають в об’єкті керування.
Оцінювання якості системи можна здійснити, використовуючи загальні фундаментальні теоретичні положення або поодинокі критерії, що характерні для даного об’єкта.
Методи аналізу якості перехідних процесів згідно [4, 6, 7] можна розділити на дві основні групи: перша – прямі методи оцінювання якості по кривій перехідного процесу; друга – опосередковані методи. Прямі методи потребують рішення системи диференційних рівнянь, опосередковані – не потребують.
Основними показниками якості процесу керування, що застосовуються в інженерних розрахунках, є: час регулювання, перерегулювання та коливальність перехідного процесу. При застосуванні кореневих методів – показниками якості є ступінь стійкості та ступінь хиткості системи [4,6,7].
Практичний інтерес при синтезі систем керування представляють інтегральні оцінки якості перехідного процесу [6,7]. Вони мають метою надати загальну оцінку швидкості затухання та величини відхилення величини, що регулюється, у сукупності, без визначення того та іншого окремо. Метод інтегральних оцінок дозволяє отримати в результаті розрахунку окремих інтегралів від деякої функції керованої змінної сумарну помилку за час перехідного процесу. Недоліком інтегральної оцінки є те, що вона годиться лише для монотонних процесів, коли не змінюється знак змінної, що досліджується. Тому більш доцільно використовувати квадратичну інтегральну оцінку. Загальним недоліком інтегральних оцінювань є те, що тут нічим не обмежується Форма кривої перехідного процесу, оскільки різні по формі перехідні процеси можуть мати одне й те саме чисельне значення інтегрального критерію якості.
З урахуванням конструктивного виконання силової частини елементів системи керування електропередачі, зокрема тиристорного перетворювача частоти, елементи якого розраховані на визначену величину комутуючого струму, з розглянутих методів оцінки якості, з метою проведення параметричного синтезу СК електропередачі дизель-потягу, найбільш доцільно використовувати показники якості процесу керування: час регулювання, перерегулювання та коливальність перехідного процесу.
У дійсний час існує ряд критеріїв, що використовуються при синтезі оптимальних законів керування асинхронним електроприводом. Усім їм властивий один недолік: у якості параметра оптимізації виступає один з енергетичних або техніко-економічних показників. Однак вони можуть бути ефективно використані у випадку параметричної оптимізації, коли відома структура системи керування, а задача стоїть у визначенні коефіцієнтів компонент системи, якщо врахувати, що сьогодні існують спеціалізовані пакети прикладних програм, в основі яких лежить процедура випадкового або градієнтного пошуку.
У роботі [8] в якості критеріїв оптимального керування використовуються лінійні комбінації двох або трьох відомих критеріїв. Це дозволяє авторам при рішенні задач оптимального керування враховувати в одному критерії як вимоги до мінімізації енергетичних затрат, так і часу (двохкомпонентний критерій) або зменшення енергетичних затрат, часу процесу керування та покращення динамічних процесів об’єкту керування (трикомпонентний критерій).
Існують й інші критерії. Так, у роботах [9 –10] розглянуто новий підхід до аналітичного конструювання лінійно-квадратичних систем керування або, як їх називають у зарубіжних джерелах, задач лінійно-квадратичної оптимізації. Ці системи керування, на відміну від традиційних критеріїв, синтезуються без урахування конкретного критерію. Однак доводиться, що отримані системи керування завжди забезпечують мінімізацію деякого критерію. Це ж відмічається і в роботі [10], що функціонал, який оптимізує, не обов’язково постулювати. Він може являтися деякою супроводжуючою інтегральною оцінкою якості перехідних процесів. Така властивість притаманна критерію якості в методі аналітичного конструювання за критерієм узагальненої роботи. Складові частини функціоналу є інтегральною оцінкою якості перехідних процесів, точності стабілізації бажаного незбуреного стану, «витрат» керування або енергетичних витрат.
Сьогодні для синтезу оптимальних систем керування нелінійними об’єктами відомий цілий ряд методів.
Одним з найбільш відомих та вживаних методів оптимального керування є принцип максимуму Понтрягіна [11]. Переваги принципу максимуму проявляються там, де можна одразу, по одному виду гамільтоніана H знайти функції, на яких він сягає максимуму. Це можна зробити тоді, коли і функціонали і керування зв’язку або лінійні як відносно керувань, так і відносно фазових координат, або лінійні хоча б відносно керувань. У загальному випадку, який-небудь функціонал, екстремуми якого ми шукаємо, або рівняння зв’язку нелінійні по керуванню U(t), безпосередньо з виду гамільтоніана вже не можна судити про функції U(t), на яких він сягає максимуму.
Основна трудність рішення задач оптимального керування за допомогою принципу максимуму Понтрягіна, як і в методі динамічного програмування, запропонованого Р.Беллманом, полягає в рішенні двохкрапкової крайової задачі [12].
Відоме також значне число поодиноких методів класичного варіаційного числення, що придатні для вузьких класів задач оптимального керування [12]. Ці методи зручні для рішення задач оптимального керування, де управління шукаються у вигляді гладких або кусочно-гладких кривих, що не містять точок з нескінченними значеннями перших похідних, а також методи аналітичного конструювання регуляторів за критерієм узагальненої роботи (АКУР), де основна трудність пов’язана з визначенням коефіцієнтів функціонала, який оптимізується. Однак в теперішній час цю проблему можна вирішити за допомогою сучасних методів синтезу систем на основі нейромережевих технологій та методів нечіткої логіки.
Останні десять років інтенсивно розвиваються методи синтезу систем керування на основі векторного управління, методів нечіткої логіки, нейронних мереж та нейронечітких мереж [13– 14].
У цих роботах [16-18] з одного боку нечіткі системи керування використовуються для об’єктів управління, модель яких невідома, а з другого – як альтернатива класичним системам керування. Показано, що важливою перевагою нейромережевих систем керування є можливість їхнього навчання на прикладах. Тут же приведено ряд можливих архітектур для побудови нейромережевих систем управління.
Побудова систем векторного керування асинхронними електроприводами розглянуто в ряді публікацій [19-21]. У [19,20] розглянуті загальні принципи векторного управління електроприводами, зокрема, побудова систем векторного керування з використанням стандартних П-, ПІ-, ПІД-регуляторів. Найбільш повно методи застосування сучасних засобів штучного інтелекту (нечіткої логіки, нейронних мереж) в керування електроприводами описані в роботах [21,22]. Однак тут недостатньо уваги приділено питанням побудови моделей систем керування з використанням нечіткої логіки для конкретного типу електроприводу та проведення порівняльного аналізу з відомими системами, що містять стандартні регулятори.
Типова структура модуля нечіткої системи управління приведена на рисунку 1.2.
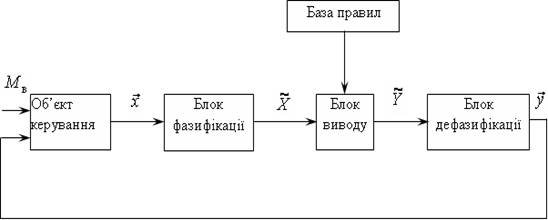
Рис. 1.2. Структура моделі нечіткої системи керування.
Інформація з об’єкта управління у вигляді чітких значень фазових координат об’єкта управління ![]() поступає на блок фазифікації, який на основі чітких значень вхідних змінних формує нечіткі значення
поступає на блок фазифікації, який на основі чітких значень вхідних змінних формує нечіткі значення ![]() відповідних лінгвістичних змінних. Блок виводу на основі правил
відповідних лінгвістичних змінних. Блок виводу на основі правил ![]() вигляду:
вигляду:
![]()
![]() ,
,
де ![]() - відповідно нечіткі значення вхідних змінних та управлінь, визначає нечіткі управління
- відповідно нечіткі значення вхідних змінних та управлінь, визначає нечіткі управління ![]() , які за допомогою блоку дефазифікації перетворюються на вектор чітких управлінь
, які за допомогою блоку дефазифікації перетворюються на вектор чітких управлінь ![]() , який впливає на виконавчі пристрої об’єкта керування за метою компенсації зовнішніх впливів ME.
, який впливає на виконавчі пристрої об’єкта керування за метою компенсації зовнішніх впливів ME.
Зазвичай нечіткі системи керування застосовуються у випадках, коли модель об’єкта невідома.
Системи керування на основі штучних нейронних мереж багатьма авторами розглядаються як альтернатива класичним системам керування. У наш час відомий цілий ряд можливих архітектур побудови нейромережевих систем керування [23-24]. Великий інтерес до нейромережевих систем керування пов’язаний з тим, що вони мають ряд корисних властивостей, яких складно досягти за допомогою інших методів. Зокрема, мова йде про робастість систем керування, про визначення управлінь в умовах, коли неточно відома модель об’єкта про більш гнучке реагування на мінливі зовнішні умови та можливість обробки даних різної природи. Можна також відмітити, що для нейромережевих моделей не існує обмежень, пов’язаних з лінійністю системи або видом застосовуваного функціонала. Важливою перевагою нейромережевих систем керування є також можливість їхнього навчання на прикладах.
До істотного недоліку нейромережевих систем управління слід віднести недоступність знань, накопичених в системі та розподілених між усіма нейронами, зовнішньому спостерігачеві. Частково цей недолік подоланий у нейронечітких системах управління, які, з одного боку, використовують нечіткі правила виробки рішень, а з іншого – володіють здатністю до навчання.
В результаті можна відмітити, що виходячи з особливостей розглянутого об’єкта та характеристик методів оптимізації, найбільш доцільно використовувати для розробки системи управління методи нечіткої логіки та методи на основі нейромережевих технологій.
Похожие работы
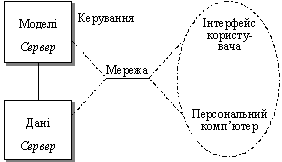
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...
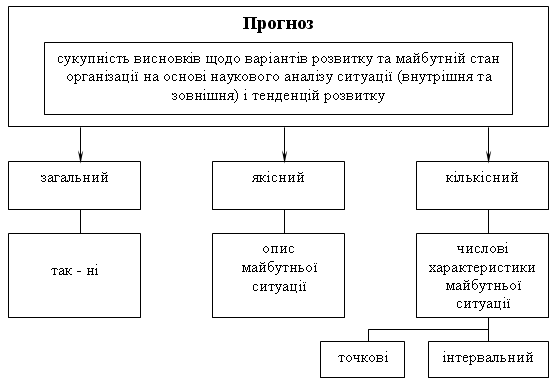

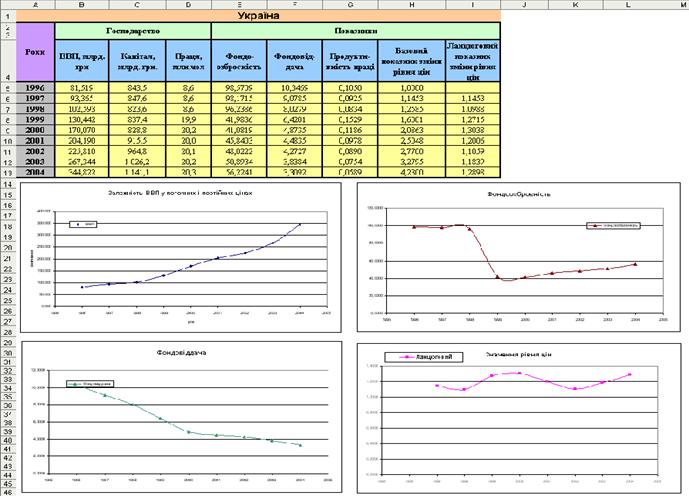
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
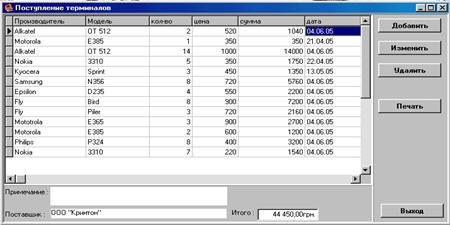
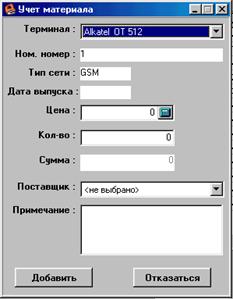
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев