АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
Розробка системи керування дизель-потяга на основі нейромережевих технологій
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
3.4 Розробка системи керування дизель-потяга на основі нейромережевих технологій
Синтез оптимальної системи керування енергетичною системою дизель-потяга можна здійснити на основі ідей теорії рівноважних математичних моделей з використанням нейромережевих технологій. Для цього спочатку необхідно мати деяку вихідну структуру системи керування, а для одержання кращої системи необхідно синтезувати додаткову (допоміжну) систему, сукупна дія яких приводить до бажаного результату, тобто забезпечує поліпшення заданого показника якості.
Поліпшення системи керування асинхронними тяговими двигунами можна спробувати здійснити шляхом рівнобіжного включення синтезованої системи регулятора на основі нейронних мереж. Як вихідна система керування обрана одна систем, синтезована за допомогою нейронної мережі, виконана корекція синтезованого закону керування по каналах напруги і частоти. Результуючий квазіоптимальний сигнал керування U може бути отриманий як:
![]() , (3.19)
, (3.19)
де ![]() - сигнал, формований згідно деякого методу (наприклад, методу АКУР);
- сигнал, формований згідно деякого методу (наприклад, методу АКУР);
![]() - додатковий сигнал, одержуваний на виході нейронної мережі.
- додатковий сигнал, одержуваний на виході нейронної мережі.
Дослідження на математичних моделях показало, що система в цьому випадку має гарну стійкість, а всі змінні, які спостерігаються, знаходиться в припустимих діапазонах.
Система керування електроприводом дизель-потяга має два канали: канал формування амплітуди керуючого впливу і канал формування частоти. Тому у вихідну структуру системи керування необхідно додати дві нейронні мережі (для кожного каналу). У якості нейронних мереж обраний багатошаровий перцептрон, що має вхідний, вихідний і два схованих шари. Структура мережі ідентична для кожного з каналів: 4 входи, 4 нейрони в першому схованому шарі, 7 нейронів у другому схованому шарі і 1 вихідний нейрон. У якості активаційної функції кожного з нейронів обрана сигмоїдальна функція виду (3.33).
 . (3.20)
. (3.20)
На входи мереж подаються модулі сигналів потокозчеплення і струму фази статорної обмотки, частота обертання ротора і коефіцієнт, пропорційний масі складу. На виході нейронної мережі формується додатковий сигнал ![]() , за допомогою якого поліпшується функціонування електропривода.
, за допомогою якого поліпшується функціонування електропривода.
На рис. 3.13 приведена структурна схема моделі електропривода дизель-потяга із синтезованою системою керування, що містить додаткові канали, реалізовані з використанням нейронних мереж. Дана модель характеризується тим, що в її структурі присутні два додаткових елементи - NeuralContr_W і NeuralContr_U, за допомогою яких здійснюється формування додаткових сигналів керування ![]() по каналах напруги і частоти. Структурні схеми каналу формування частоти і його основних складових компонентів приведені відповідно на рис. 3.14 і 3.15.
по каналах напруги і частоти. Структурні схеми каналу формування частоти і його основних складових компонентів приведені відповідно на рис. 3.14 і 3.15.
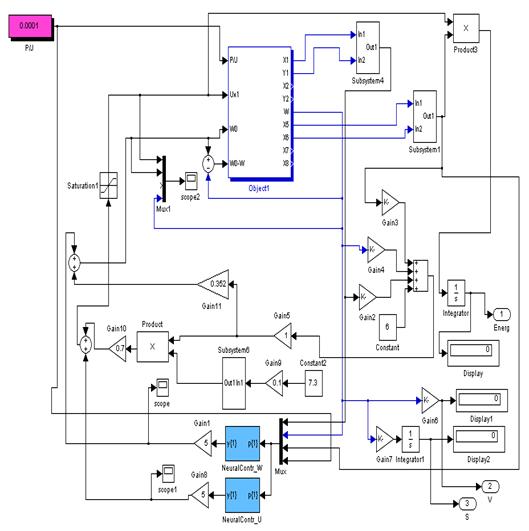
Рис. 3.13. Структурна схема моделі електропривода дизель-потяга із синтезованою системою керування, що містить додаткові канали, реалізовані з використанням нейронних мереж.
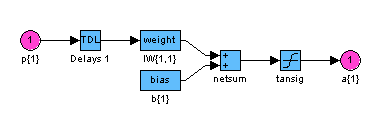
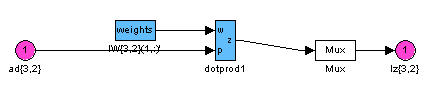
На рис. 3.14-а приведена внутрішня структура блоку NeuralContr_W. Субблоки Layer1, Layer2 і Layer3 являють собою відповідно 1-й, 2-й схований і вихідний шари нейронної мережі. Вхідні сигнали надходять на вхідний шар p{1} у виді вектора, що складає з 4-х елементів (по кількості вхідних сигналів). Далі вектор надходить на вхід першого схованого шару (Layer1). Структура субблоков сімейства Layer приведена на рис 3.14-б. Робота блоку полягає в наступному: спочатку обчислюється зважена сума вхідного вектора для кожного з нейронів першого схованого шару (блок ІW{1,1}) і додавання до цієї суми зсуву (b{1}), що являє собою вектор, число елементів якого дорівнює числу нейронів у цьому шарі. Структура блоку ІW{1,1} приведена на рис 3.15-а. Тут блоки ІW{1,1}(1,:)' - ІW{1,1}(4,:)' задають відповідно вагарні коефіцієнти між відповідним нейроном першого схованого шару (1 - 4) і вхідним шаром. На вхід блоків dotprod1 - dotprod4 подаються вхідний вектор pd{1,1} і відповідні вагарні коефіцієнти. Ці блоки виконують зважене підсумовування вхідного вектора pd{1,1}. Після додавання зсуву до зваженої суми (рис. 3.14-б), отриманий результат, що представляє собою вектор з 4-х елементів (по числу нейронів першого схованого шару), подається на активаційну функцію нейронів (блок tansіg), що реалізує функцію гіперболічного тангенса. Отриманий проміжний результат передається на другий схований шар (Layer2). Принцип роботи аналогічний описаному вище за винятком того, що число блоків dotprod, що виконують зважену підсумовування, дорівнює 7 (числу нейронів у другому схованому шарі, див .рис.3.15-б). На виході другого шару виходить вектор, що складається з 7-ми елементів, який подається на вихідний шар (Layer3). У результаті на виході нейронної мережі (вихід блоку Layer3) виходить сигнал, що здійснює корекцію сигналу керування по частоті (рис.3.15-в). Усі вагові коефіцієнти між шарами мережі і коефіцієнти зсувів були отримані в результаті настроювання мережі, що здійснювалася генетичним алгоритмом.
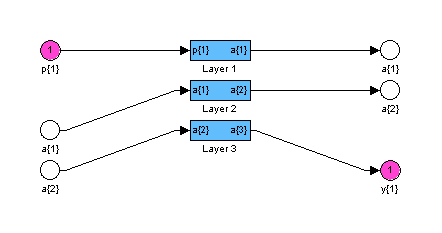
а)
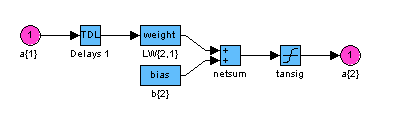
б) 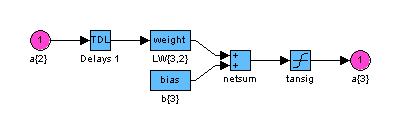
Рис. 3.14. Структурна схема моделі нейрорегулятора каналу формування частоти.
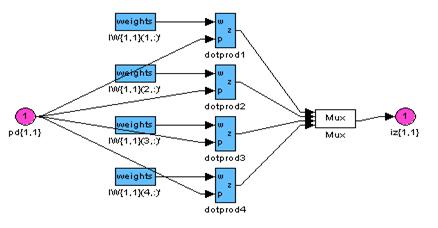
а).
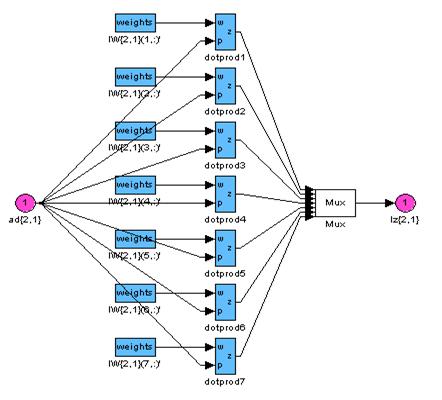
б).
в).
Рис.3.15. Структурні схеми для визначення вагових коефіцієнтів нейрорегулятора.
Структура нейрорегулятора для каналу формування напруги аналогічна, відрізняється тільки коефіцієнтами настроювання.
При настроюванні мережі до регуляторів можна пред'являти ті чи інші оптимізаційні властивості, наприклад, при тих самих енергетичних витратах (коли нейронна мережа включена в систему керування) одержати менший час розвантажування або більший пройдений шлях, або при однакових кінцевих швидкостях зменшити енергетичні витрати на розгін дизель-потяга. Розглядаються і різні комбінації цих критеріїв.
При навчанні нейронних мереж (НМ) використовувався генетичний алгоритм (ГА). З його допомогою настроювалися параметри НМ відповідно до заданого критерію. Як гени хромосоми в ГА використовуються усі вагові коефіцієнти між шарами нейронних мереж, при цьому перша частина хромосоми являє собою параметри нейронної мережі, що виконує корекцію закону керування по частоті, а друга - по амплітуді.
На рис. 3.16 приведена узагальнена структура настроювання параметрів нейронних мереж, що входять до складу синтезованої системи керування. Вихідна популяція складалася з 150 хромосом і генерувалася випадковим образом. Кожен параметр мереж кодувався 16 бітами. Причому такі генетичні оператори як мутація і кросовер здійснювалися для кожної з двох частин хромосоми окремо. Оскільки діапазон зміни кожного з параметрів прийнятий від -1 до +1, то 16-и розрядне кодування забезпечує дискретність зміни параметрів не гірше чим ![]() .
.
Словесно алгоритм можна описати в такий спосіб: на першому етапі випадковим образом генерується похідна популяція бінарних хромосом. Обчислюється критерій функціонування системи керування без використання коригувальних нейронних мереж. Потім визначається індекс пристосованості кожної хромосоми при функціонуванні об'єкта і по його значеннях виконується впорядкування популяції. Обчислюється середня по популяції пристосованість. Спираючи на неї, визначається імовірність, з яким кожна особа, що володіє пристосованістю більше середньої, може стати батьком. При цьому для кожного батька в процесі генерації хромосоми нащадка мається дві можливості: або просто бути скопійованим у наступне покоління, або піддадуться впливу генетичних операторів.
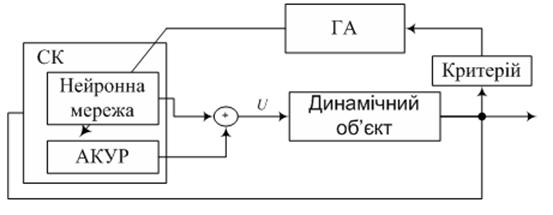
Рис.3.16. Узагальнена структура настроювання параметрів нейронних мереж системи керування.
У такий спосіб генерується задане число М нащадків. Оскільки нащадки отримані від кращих батьків, то їхня пристосованість може бути більш високої.
Робота алгоритму закінчується при досягненні популяцією стану адаптації, що ідентифікується по стягуванню ядра популяції спочатку в щільну хмару, а потім у крапку. Кросовер як механізм мінливості втрачає в таких умовах свою силу. Мутація й інверсія будуть як і раніш модифікувати потомство, продовжуючи тестування нових і нових точок простору пошуку. У результаті знаходимо деякий екстремум, хоча характер його невідомий.
На рис. 3.17 представлена спрощена схема генетичного алгоритму.
Результати досліджень приведені в розділі 4.
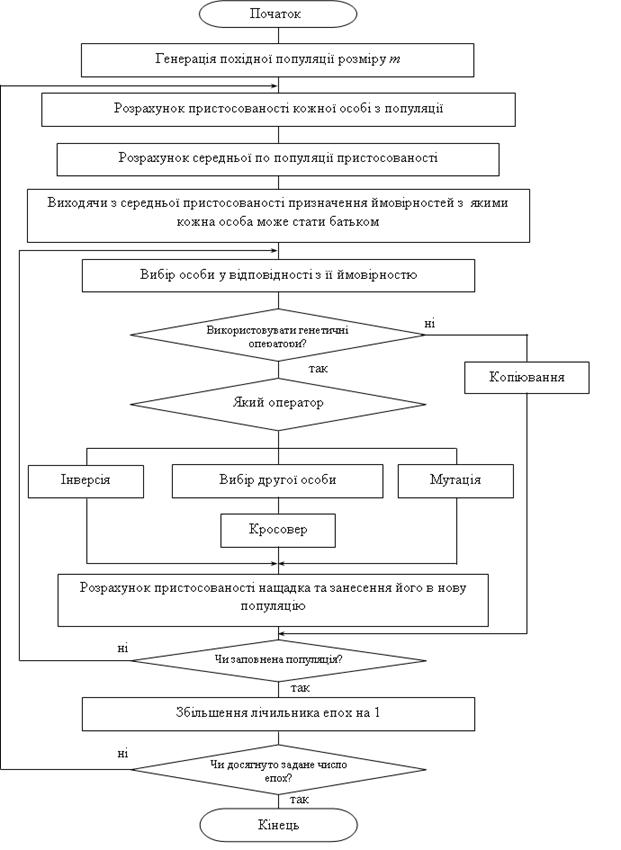
Рис.3.17. Схема генетичного алгоритму.
Похожие работы
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...

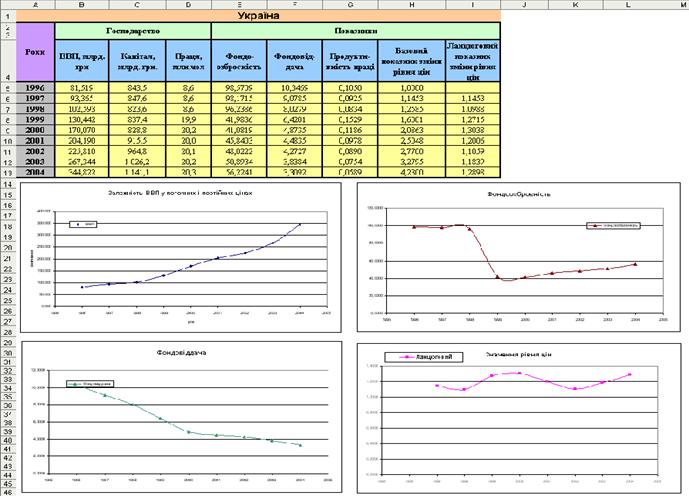
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев