АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
3. РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
3.1 Розробка системи керування електроприводом змінного струму з використанням методів нечіткої логіки та нейроконтролерів
Тяговий електропривод дизель-потяга являє собою конструктивну сукупність тягових асинхронних двигунів, перетворювачів частоти і пристрою керування. Зростання ступеня інтеграції в мікропроцесорній техніці і перехід від мікропроцесорів до мікроконтролерів привів до заміни аналогових систем керування тяговими електроприводами на системи безпосереднього цифрового керування. Перехід до широкодіапазонних (до 1:10000), швидкодіючих електроприводів транспортних засобів, зажадав застосування більш складних структур на основі векторного керування.
При векторному керуванні, на відміну від частотного, керування швидкістю обертання тягового асинхронного двигуна здійснюється за допомогою регулювання амплітуди і фази вектора поля двигуна. Таке керування є найбільш точним у динаміці та статиці, а також більш економічним.
Однак, як при частотному, так і при векторному способі керування, необхідно здійснювати керування процесом розгону дизель-потяга з урахуванням протікання електромагнітних процесів і оптимізації енергетичних витрат, що вимагає у свою чергу створення ефективних систем керування. Як відзначено в розділі 1, одним із критеріїв якості протікання електромагнітних процесів є величина перерегулювання. Задачею системи керування в даному випадку є те, що б величина перерегулювання не перевищувала деякого граничного значення в перехідному режимі. В існуючих системах керування тягових електроприводів ці задачі вирішувалися за допомогою використання ПІД регуляторів і блоків задавання інтенсивності, що формують сигнал керування в залежності від зростання чи убування сигналу керування на виході відповідного ПІД регулятора. В останні роки рішення аналогічних задач пропонується виконувати з використанням сучасних технологій, в основі яких лежать методи аналізу і синтезу складних технічних систем, зокрема систем векторного керування і нейромережевих технологій, використовуючи при цьому пряме цифрове керування моментом. Відмінною рисою цих рішень є гранично висока швидкодія систем керування, реалізованих, як правило, на базі цифрових релейних регуляторів чи регуляторів, що працюють на принципах нечіткої логіки та нейроконтролерів.
У цьому розділі приведені результати розробки моделі системи керування з використанням методів нечіткої логіки для електропривода дизель-потяга з тяговими асинхронними двигунами і порівняльний аналіз за допомогою моделювання динамічних характеристик, у порівнянні з системами керування, побудованими на основі стандартних ПІД - регуляторів.
На рис. 3.1 приведена структура блоку нечіткого контролера швидкості для системи векторного керування двигуном електропривода дизель-потяга. Тут:
БД - блок диференціювання;
НК - нейроконтроллер;
БІ - блок інтегрування;
БВУ - блок векторного управління;
АД- асинхронний двигун;
Е - сигнал помилки;
СЕ - сигнал, пропорційний похідної сигналу помилки;
DU, U - відповідно сигнали на виходах блоків НК і БІ;
![]() ,
, ![]() - відповідно сигнал, пропорційний швидкості обертання ротора двигуна і швидкості, що задається (сигнал завдання).
- відповідно сигнал, пропорційний швидкості обертання ротора двигуна і швидкості, що задається (сигнал завдання).
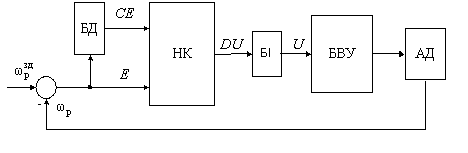
Рис. 3.1. Структурна схема регулятора швидкості.
На вхід нейроконтролера надходять два сигнали: Е и СЕ. Сигнал помилки визначається як :
![]() (3.1)
(3.1)
Зміна значення помилки СЕ визначається похідної сигналу помилки Е як ![]() .
.
Нейроконтролер, на підставі значення сигналу помилки Е установлення швидкості, відповідно змінює вихідний сигнал DU так, щоб поточна швидкість відповідала швидкості, що задається .
У дискретній системі
![]() , (3.2)
, (3.2)
де ![]() на відрізку часу
на відрізку часу ![]() . Якщо
. Якщо ![]() - константа, то значення сигналу CE пропорційно сигналу
- константа, то значення сигналу CE пропорційно сигналу ![]() .
.
Вихідний сигнал DU нейроконтролера в системі векторного керування асинхронним двигуном електропривода є відповідною величиною струму завдання ![]() [20]. Після його інтегрування блоком БІ одержуємо середнє значення на періоді квантування сигналу U, пропорційного струму завдання
[20]. Після його інтегрування блоком БІ одержуємо середнє значення на періоді квантування сигналу U, пропорційного струму завдання ![]() . Виходячи з фізичного принципу керування системою, алгоритм керування наступний:
. Виходячи з фізичного принципу керування системою, алгоритм керування наступний:
якщо E = ZE і СЕ ![]() PS, (3.3)
PS, (3.3)
то на виході нейроконтролера формується сигнал
DU = NS. (3.4)
де E і СЕ - вхідні нечіткі змінні;
ZE, PS, NS - невеликі позитивні числа.
У цьому випадку сигнал DU на виході нейроконтролера - нечітка змінна, а змінні ZE, PS і NS є множиною MF функції приналежності.
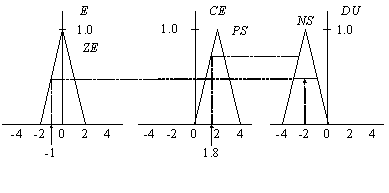
Рис. 3.2. Вигляд функцій приналежності.
На рис. 3.2 множину функцій приналежності представлено у виді трикутних функцій.
Формування вихідного сигналу нейроконтролером здійснюється на основі декількох окремих нечітких правил. На рис. 3.3 приведена ілюстрація принципу формування сигналу керування DU на основі двох правил з використанням методу Мамдані [21]:
Правило 1: Якщо E = ZE і CE = NS, то DU = NS.
Правило 2: Якщо E = PS і CE = NS, то DU = ZE,
де DU - вихідний сигнал нейроконтролера.
Для даної бази правил керуючої системи, нечіткий контролер обчислює багатозначний керуючий вплив для специфічних значень вхідних перемінних. У [21] описані кілька правил для одержання керуючого впливу, але найбільше часто використовується правило типу "МАКСИМУМ-МІНІМУМ". На рис. 3.3 показаний принцип формування сигналів керування на основі двох правил.
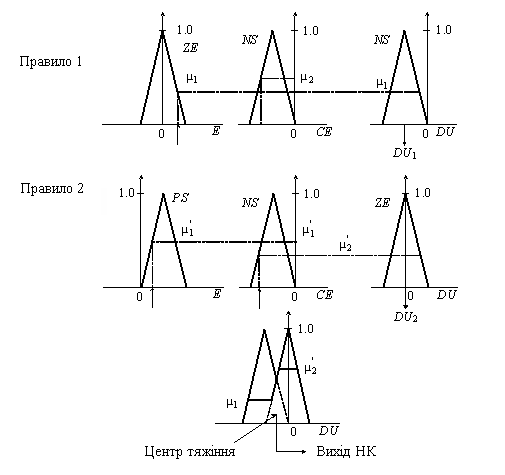
Рис. 3.3. Принцип роботи контролера швидкості на основі двох правил.
Вихідна функція приналежності кожного правила визначається оператором "МІНІМУМ", а формування нечіткого виходу виконується оператором "МАКСИМУМ".
Оскільки нечіткий нейроконтролер виконує функцію статичного нелінійного перетворення, то можна записати дії контролера у формі:
![]() (3.5)
(3.5)
де ![]() і
і ![]() - нелінійні коефіцієнти.
- нелінійні коефіцієнти.
З урахуванням процесу інтегрування за допомогою блоку БІ (див. рис. 3.1) одержуємо середнє значення сигналу U, пропорційне току завдання ![]() відповідно до виразів:
відповідно до виразів:
![]() (3.6)
(3.6)
чи
![]() , (3.7)
, (3.7)
що є формою запису нечіткого ПІ контролера з нелінійними коефіцієнтами. Подібним чином можна записати алгоритм нечіткого контролера для П- і ПІД-контролеров.
Алгоритм для нечіткого П-контроллера:
Якщо Е = PS, то U = PB, (3.8)
де PB - велике позитивне число.
Чи можна записати:
U = KE, (3.9)
де K - нелінійний множник.
Алгоритм для нечіткого ПІД - контролера:
Якщо
Е = PS і CE = NS і E = PS, то DU = ZE, (3.10)
де E - похідна СЕ.
Керування може бути записане у формі:
![]() . (3.11)
. (3.11)
З урахуванням процесу інтегрування за допомогою блоку БІ (як і для ПІ-регулятора) одержуємо середнє значення сигналу U, пропорційного струму задавання ![]() відповідно до виразів:
відповідно до виразів:
![]() (3.12)
(3.12)
чи
![]() , (3.13)
, (3.13)
тобто ПІД-контролер.
Нелінійні коефіцієнти, що адаптуються в процесі функціонування, у нечіткому контролері дозволяють стійко формувати сигнали керування при зміні параметрів системи в процесі функціонування.
Загальна структура нечіткої системи зі зворотним зв'язком приведений на рис. 3.4.
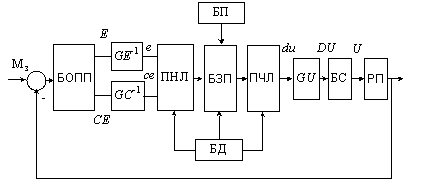
Рис. 3.4. Структура нечіткого контролера у системі керування зі зворотнім зв’язком.
Тут:
БП - база правил для нечіткого нейроконтролера;
ПНЛ - перехід до нечіткої логіки;
ПЧЛ - повернення до чітких значень;
БД - база даних;
РП - регульований пристрій,
БОПП - блок обчислення помилки і її похідної,
БЗП - блок застосування правил.
Сигнали помилки E і зміни помилки CE перетворяться у відповідні сигнали у відносних одиницях e і ce шляхом розподілу на масштабні коефіцієнти, тобто : e=E/GE і ce=CE/GC. Аналогічно, вихідний контролюючий сигнал U обчислюється шляхом множення вихідного сигналу у відносних одиницях на масштабний коефіцієнт GU, тобто DU=duGU, з наступним його інтегруванням для одержання U.
Перевага нечіткого нейроконтролера при використанні відносних одиниць полягає в тому, що той самий керуючий алгоритм може бути використаний для всіх керованих об'єктів одного типу. Масштабні коефіцієнти можуть бути задані як константи чи бути програмованими; програмовані масштабні коефіцієнти можуть контролювати чутливість.
Результати моделювання системи керування електроприводом, що містить тягові асинхронні двигуни з використанням стандартного ПІ регулятора і побудованого з використанням нечіткої логіки в середовищі MATLAB приведені в розділі 4.
3.2 Вибір функцій приналежності нечітких змінних при розробці нечіткого регулятора на основі нейроконтролера в системі керування електроприводом змінного струму
В останні роки в теорії автоматичного керування з'явився напрямок, пов'язаний з методами нечіткої логіки, що дозволяють будувати цифрові регулятори, які забезпечують гранично високу швидкодію систем керування. Однак залишається відкритим питання вибору функцій приналежності для нечітких змінних, що описують функціонування регулятора. Тому доцільно провести порівняльний аналіз різних функцій приналежності і їхній вплив на роботу проектованого регулятора.
Узагальнена структура системи векторного керування тяговим двигуном електропривода змінного струму дизель-потяга з використанням нечіткого контролера по кутовій швидкості двигуна [29] приведена на рис. 3.4.
Сигнали помилки і похідної помилки перетворюються блоками GE-1 і GC-1 у відповідні сигнали у відносних одиницях e і ce шляхом ділення на масштабні коефіцієнти. Аналогічно, вихідний керуючий сигнал u обчислюється шляхом множення вихідного сигналу у відносних одиницях du на масштабний коефіцієнт GU, з наступним його інтегруванням блоком БІ для одержання u.
У якості нечітких перемінних розглядаються наступні:
Е - сигнал помилки по кутовій швидкості, що може приймати значення: {Z1 - нульовий сигнал помилки; NS1 - невеликий негативний; NM1 - середній негативний; NB1 - великий негативний; PS1 - невеликий позитивний; РM1 - середній позитивний; РB1 - великий позитивний};
СЕ - сигнал помилки по похідній кутовій швидкості; {Z2 - нульовий сигнал по похідної помилки; NS2 - невеликий негативний; NM2 - середній негативний; NB2 - великий негативний; PS2 - невеликий позитивний; РM2 - середній позитивний; РB2 - великий позитивний};
DU - сигнал нечіткого керування, {Z3 - нульовий сигнал керування; NVS3 - дуже малий негативний; NS3 - невеликий негативний; NM3 - середній негативний; NB3 - великий негативний; PVS3 - дуже малий позитивний; РS3 - невеликий позитивний; РM3 - середній позитивний; РB3 - великий позитивний}.
Формування нечіткого висновку нейроконтролером здійснюється на підставі нечітких правил, приведених у таблиці 3.1:
| Таблиця 3.1. | |||||||
| E CE | NB1 | NM1 | NS1 | Z1 | PS1 | PM1 | PB1 |
| NB2 | NB3 | NB3 | NB3 | NM3 | NS3 | NVS3 | Z3 |
| NM2 | NB3 | NB3 | NM3 | NS3 | NVS3 | Z3 | PVS3 |
| NS2 | NB3 | NM3 | NS3 | NVS3 | Z3 | PVS3 | PS3 |
| Z2 | NM3 | NS3 | NVS3 | Z3 | PVS3 | PS3 | PM3 |
| PS2 | NS3 | NVS3 | Z3 | PVS3 | PS3 | PM3 | PB3 |
| PM2 | NVS3 | Z3 | PVS3 | PS3 | PM3 | PB3 | PB3 |
| PB2 | Z3 | PVS3 | PS3 | PM3 | PB3 | PB3 | PB3 |
Правила формуються в такий спосіб:
1. якщо Е = NB1 і СE = NB2, то DU = NB3,
2. якщо Е = NM1 і СE = NB2, то DU = NB3 і т.д.
Областю визначення всіх нечітких перемінних є інтервал [-1, 1] відносних значень відповідно сигналів помилки по кутовій швидкості, по похідній кутовій швидкості і по сигналі керування. Як форми функцій приналежності нечітких лінгвістичних перемінних Е, СЕ, DU розглядалися форми, приведені на рис. 3.5.
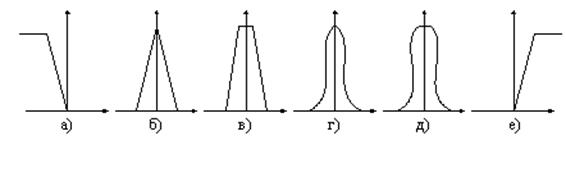
Рис. 3.5. Форми функцій приналежності.
Експерименти проводилися для різних варіантів завдання форм функцій приналежності як вхідних так і вихідний нечітких перемінних.
Спочатку обиралися однотипні форми функцій приналежності (для входу і виходу). При цьому отримали, що якщо функції приналежності описувалися формами а) - в) і е), то нечіткий нейроконтролер функціонував практично однаково, тільки якщо використовувалися функції вигляду в) (трапеціїдальні), одержали деяке перерегулювання в порівнянні з функціями вигляду б).
На рис. 3.6 приведені результати для випадку використання функцій б) і в).
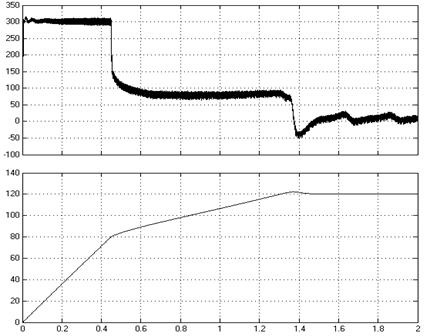
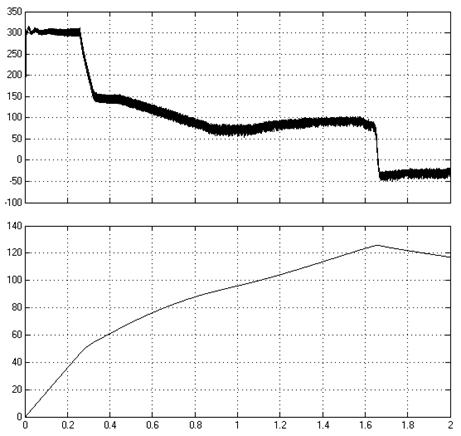
Рис. 3.6. Результати роботи нечіткого нейрорегулятора для випадків використання функцій приналежності вигляду б) (трикутні) та в) (трапеціїдальні)
При використанні функцій приналежності виду г) і д) регулятор не виконував свою основну функцію (рис. 3.7).
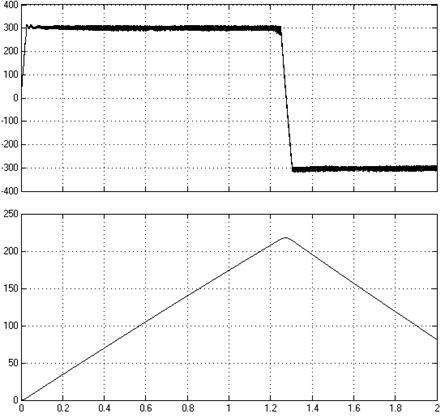
Рис. 3.7. Результати роботи нечіткого нейрорегулятора при використанні функцій приналежності вигляду г) і д) (дзвоноподібні).
Далі виконали комбінування: для вхідних змінних вибрали один тип функцій приналежності, а для вихідної - іншу. При цьому з'ясувалося, що форма функцій приналежності для вихідної величини (сигналу нечіткого керування DU) є не визначальною, тобто за якість роботи регулятора відповідає вибір форми функцій приналежності для вхідних нечітких перемінних (сигналу помилки по кутовій швидкості і сигналу помилки по похідній кутовій швидкості). На рис. 3.8 приведені залежності при використанні для входу функцій приналежності трикутної форми (виду в)), а для виходу - виду г).
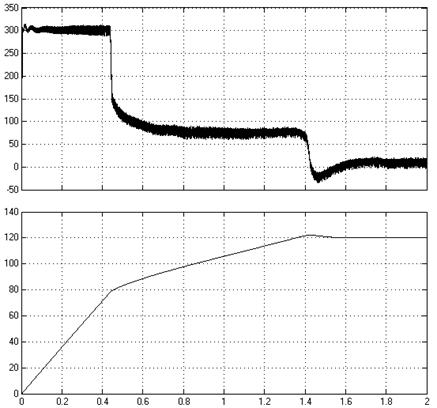
Рис. 3.8. Результати роботи нечіткого нейроконтролера при використанні для входу функцій приналежності трикутної форми (виду в)), а для виходу - виду г).
З аналізу рис. 3.8 можна побачити, що використання на виході функцій приналежності виду г) дозволяє трохи згладити форму кривої моменту, хоча графік швидкості практично залишився без змін.
Проведені дослідження дозволяють зробити висновок, що використання функцій приналежності виду г) і д) як для вхідних так і для вихідний нечіткої змінної (одночасно) не дозволяє побудувати працездатний регулятор. Визначальним є вибір функцій приналежності для вхідних нечітких перемінних. Для вхідних нечітких змінних краще обирати функції приналежності виду б) чи в), для вихідний - г) чи д).
Похожие работы
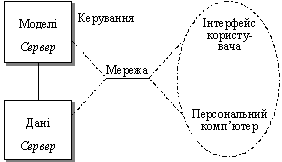
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...
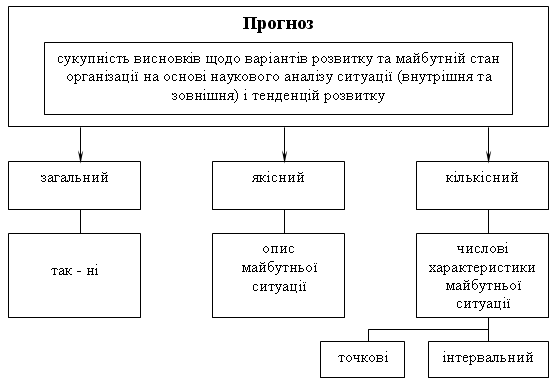

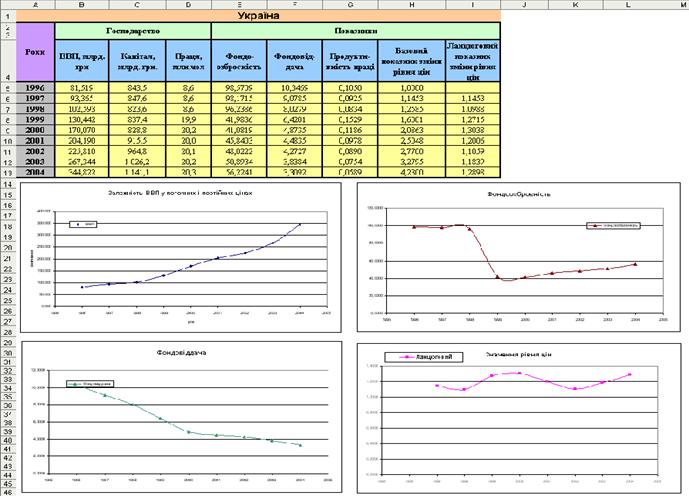
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
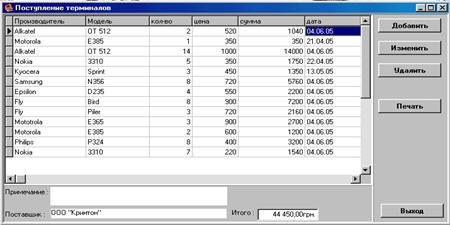
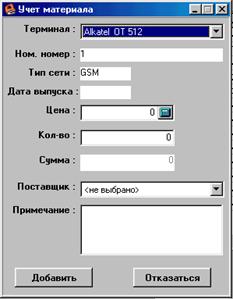
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев