АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
Моделювання пристроїв САК об’єкта керування
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
2.2. Моделювання пристроїв САК об’єкта керування
Електропередача дизель-потягу має автономну систему автоматичного керування, яка здійснює спільну роботу з дизелем та забезпечує керування тяговими асинхронними двигунами для реалізації тягових характеристик у всьому діапазоні швидкостей та навантажень. У електропередачі, що досліджується, використовується САК, яка забезпечує формування амплітудного значення напруги живлення та частоти тягових асинхронних двигунів. В електропередачі дизель-потягу САК виконана двоконтурною. Перший контур здійснює регулювання збудження тягового генератора та задає величину напруги, яка підводиться до двигунів. Він забезпечує стабілізацію струму асинхронних двигунів при пуску та регулювання струму та напруги генератора в зоні дії обмеження по напрузі дизеля. Другий контур регулювання є підлеглим по відношенню до першого, він здійснює регулювання частоти живлення тягових двигунів.
Для розробки моделей пристроїв САК використані структурна схема системи керування та функціональні схеми каналів регулювання окремих компонентів енергетичної системи дизель-потягу.
Структурна схема системи управління електропередачі дизель-потягу приведена на рис. 2.5.
При дослідженні САК об’єкта керування практичний інтерес являють математичні моделі регуляторів тягового генератора та електропривода з метою формування керуючих впливів по каналу напруги та частоти [26].
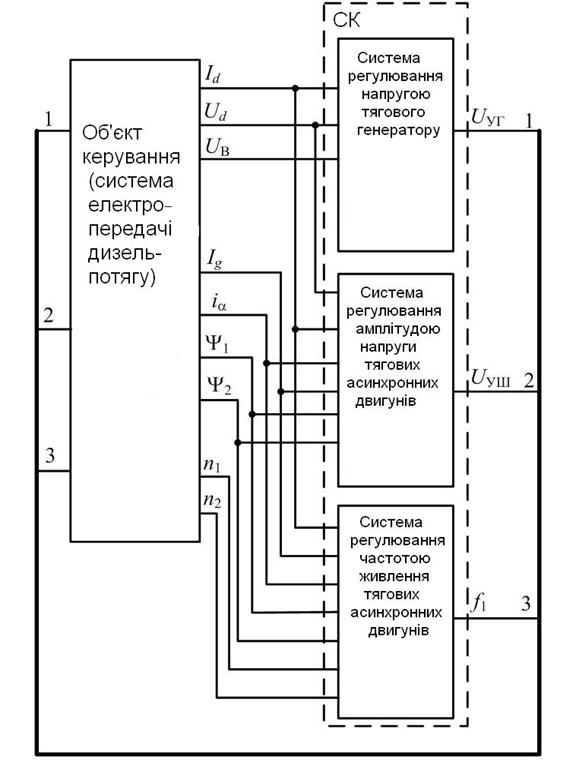
Рис. 2.5. Структурна схема системи керування електропередачі дизель-потягу.
До першого контуру САК електропередачі відноситься регулятор тягового генератора (РТГ), який призначений для формування сигналу керуючого впливу по збудженню тягового генератора UУГ . В якості вхідних сигналів для РТГ використовуються напруга, пропорційна частоті тягового генератора UfГ; напруга обмотки збудження UВ; струм мостів випрямлювачів IОТ; напруга задавання UЗГТ; активні струми Id1, Id2 кожного ТАД; напруга генератора UГ.
Формування сигналу UУГ з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення у контур регулювання пристроїв, які функціонують згідно до певних алгоритмів, що реалізують відповідні закони управління, такі як пропорційний, інтегральний, пропорційно-інтегральний або більш складні, якщо не можна досягти заданих показників якості шляхом застосування одного з названих алгоритмів.
У САК електропередачі дизель-потягу для формування сигналу керуючого впливу по збудженню тягового генератора UУГ, як один з можливих варіантів, може бути використаний пропорційно-інтегральний закон управління. Математична модель регулятора збудження може бути представлена у вигляді:
 , (2.6)
, (2.6)
 , (2.7)
, (2.7)
 , (2.8)
, (2.8)
UЗГ = UЗГ2 – UУВ = K9 + K7UfГ – UУВ, (2.9)
UfГ = fГ  , (2.10)
, (2.10)
UЗВ = K8UfГ + ![]() , (2.11)
, (2.11)
UУВ = K6(UЗВ+ UВ), (2.12)
UВ = UВГ , (2.13)
, (2.13)
де K1 – K10 – коефіцієнти підсилення;
Т1 – Т5 – постійні часу інтегрування;
р – оператор Лапласа;
UЗГ2 – сигнал керування, що здійснює обмеження максимальної напруги тягового генератора.
Значення UЗГ1 формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі. Величина T3 визначається з умови:
T3 = T31 при UЗГ1 £ UЗГ;
T3 = T32 при UЗГ1 > UЗГ,
де Т31, Т32 – постійні часу інтегрування, що визначаються в процесі досліджень.
За допомогою сигналу управління UУВ здійснюється обмеження максимального значення напруги збудження тягового генератора.
Коефіцієнти передач К2, К3 та постійні часу Т2, Т3 визначаються в процесі досліджень. При цьому значення постійної часу Т3 (блок задавання інтенсивності), як правило, має різні значення при «накиданні» та « скиданні» сигналу UЗГ, який на нього поступає.
З метою визначення структури та параметрів регулятора вихідної напруги інверторів електроприводу, його модель може бути представлена сукупністю моделей каналу струму Ig та каналу потужності РГ.
Ці канали призначені для формування сигналу керуючого впливу UУШ по вихідній напрузі інверторів.
Математична модель регулятору вихідної напруги інверторів електроприводу каналу струму Ig в режимі без урахування процесів буксування може бути представлена у вигляді:
![]() =
= ![]()
![]() , (2.14)
, (2.14)
 (2.15)
(2.15)
![]() = KIg
= KIg , (2.16)
, (2.16)
![]() =
=![]()
![]() , (2.17)
, (2.17)
UG =![]()
 , (2.18)
, (2.18)
IYG =K8UG, (2.19)
![]()
![]() = IYG
= IYG

 , (2.20)
, (2.20)
![]() де Кi (i = 1, 10) – коефіцієнти підсилення;
де Кi (i = 1, 10) – коефіцієнти підсилення;
Тj (j = 1, 4) – постійні часу (Т1 –постійна часу блоку задавання інтенсивності);
![]() – вихідний сигнал низькочастотного фільтру, що встановлюється на виході ПІ-регулятора;
– вихідний сигнал низькочастотного фільтру, що встановлюється на виході ПІ-регулятора;
KIg– вихідний сигнал ПІ-регулятора каналу струму;
![]() – сигнал, пропорційний струму навантаження ТАД;
– сигнал, пропорційний струму навантаження ТАД;
IYG – вхідний сигнал формувача зворотного зв’язку по каналу струму;
UG – сигнал, який відповідає ефективному значенню напруги живлення ТАД.
Співвідношення (2.15) описує модель регулятора каналу обмежувача струму (канал Ig), використовуючи при цьому пропорційно-інтегральний закон керування. При проведенні досліджень не виключається використання також інших законів керування.
Формування сигналу задавання UЗТ здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з встановленням певного темпу його наростання.
Математична модель регулятора вихідної напруги інверторів електроприводу каналу потужності PГ у режимі тяги може бути представлена у вигляді:
![]() = K2
= K2![]() W(p), (2.21)
W(p), (2.21)
W(p) =  , (2.22)
, (2.22)
![]() =
= ![]()
![]() , (2.23)
, (2.23)
IУМ = ![]()
 , (2.24)
, (2.24)
![]()
![]() = IУМUУГ
= IУМUУГ , (2.25)
, (2.25)
![]() де Кi (i = 2, 6) – коефіцієнти підсилення;
де Кi (i = 2, 6) – коефіцієнти підсилення;
Тj (j = 1, 2) – постійні часу(Т1 –постійна часу блока задавання інтенсивності);
UУШ – сигнал керуючого впливу по вихідній напрузі інверторів;
![]() – вихідний сигнал регулятора каналу потужності;
– вихідний сигнал регулятора каналу потужності;
![]() – сигнал, пропорційний вживаній потужності ТАД;
– сигнал, пропорційний вживаній потужності ТАД;
UУГ – сигнал , пропорційний напрузі генератора;
IУМ – вхідний сигнал формувача зворотного зв’язку по каналу потужності;
b1, b2 – постійні коефіцієнти;
Т – постійна часу блока задавання інтенсивності.
Формування сигналу задавання UЗМ здійснюється на основі використання сигналу, пропорційного номеру позиції контролеру машиніста, з установленням визначеного темпу його наростання.
На основі розробленої моделі уточнена структура САК каналу обмеження струму, визначені значення параметрів регулятора вихідної напруги з урахуванням забезпечення вимог до якісних показників перехідного процесу (величини перерегулювання, часу регулювання, числа коливань) [2-106]. Результати досліджень регулятора вихідної напруги (канал обмеження струму) при різних коефіцієнтах підсилення К4 приведені на рис. 2.7, де процеси 1-5 (криві перехідних процесів струму навантаження ТАД) відповідають коефіцієнтам підсилення К4, відповідно: 0.2; 0.3; 0.4; 0.5; 0.6.
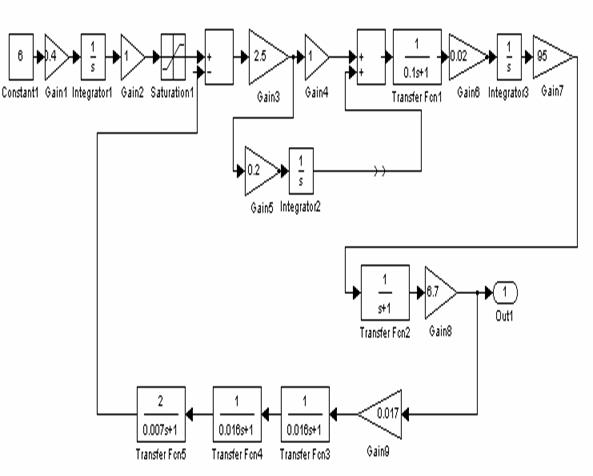
Рис. 2.6. Структурна схема моделі регулятора вихідної напруги.
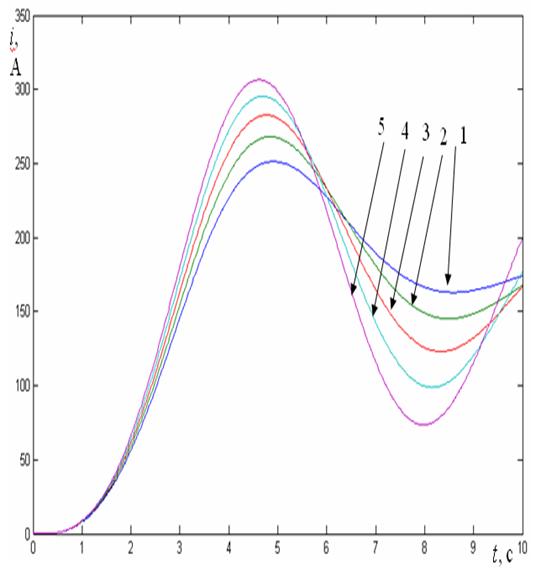
Рис. 2.7. Результати моделювання з різними коефіцієнтами підсилення К4.
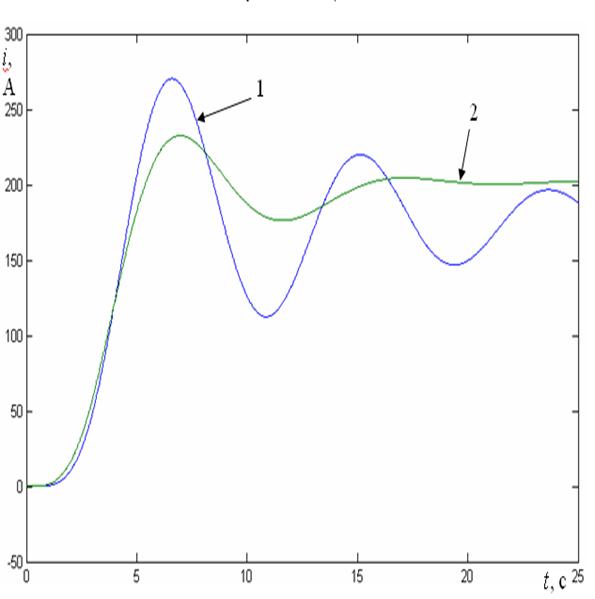
Рис. 2.8. Результати роботи ланки корекції.
На рис. 2.8 приведені результати моделювання (криві перехідних процесів струми навантаження ТАД) скоректованої системи регулювання, що забезпечує виконання необхідних вимог до якісних показників перехідного процесу регулятора вихідної напруги інверторів. Крива 1 – перехідний процес струму навантаження ТАД без урахування корекції; крива 2 – з урахуванням корекції.
Похожие работы
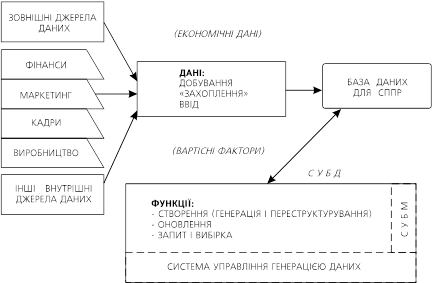
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...
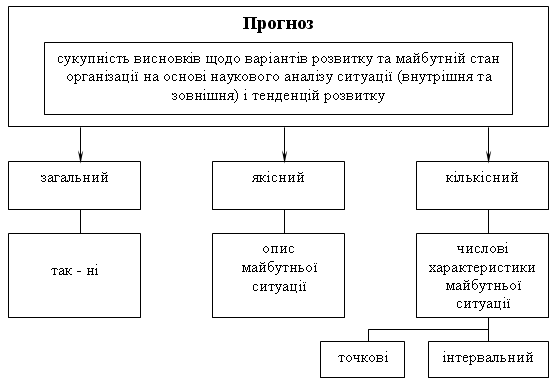

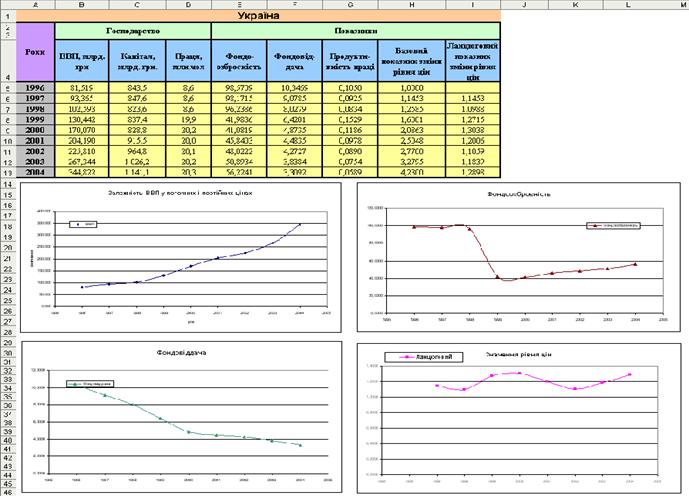
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
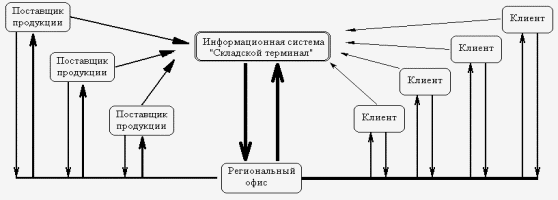
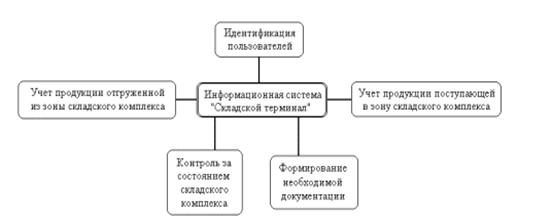
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев