АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
4.2 Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
Результати моделювання системи керування електроприводом, що містить тягові асинхронні двигуни з використанням стандартного ПІ регулятора і побудованого з використанням нечіткої логіки в середовищі MATLAB відповідно показані на рис. 4.13 і рис. 4.14. Верхній графік залежність електромагнітного моменту від часу M(t), нижній - швидкості обертання ротора двигуна від часу (t).
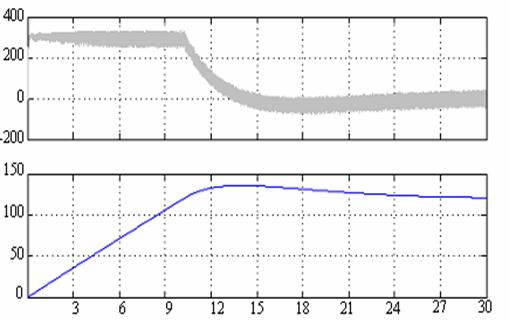
Рис. 4.13. Залежності M(t), ![]() ( стандартний ПІ-регулятор)
( стандартний ПІ-регулятор)
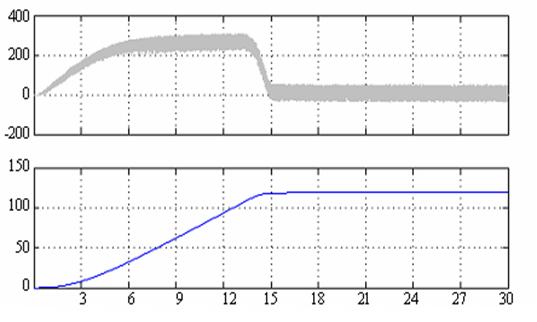
Рис. 4.14. Залежності M(t), ![]() (ПІ-регулятор з використанням нечіткої логіки)
(ПІ-регулятор з використанням нечіткої логіки)
Проведені дослідження синтезованої системи векторного керування тяговим електроприводом підтвердили ефективність застосування методів нечіткої логіки при проектуванні регуляторів. Перерегулювання у випадку використання стандартного ПІ контролера, що спостерігається на рис. 4.13, складає 14%, при використанні нечіткого контролера перерегулювання практично відсутнє. До того ж, у першому випадку, у перехідному режимі двигун електропривода може перейти в генераторний режим, що не припустимо в процесі функціонування системи.
На рис. 4.15 представлені криві зміни амплітуди і частоти, як сигналів керування, для похідної (базової) моделі системи керування (криві 1 і 3) і моделі з використанням нейронних мереж (криві 2 і 4) при одній і тій же навантаженості складу (Р/J = 0.0001).
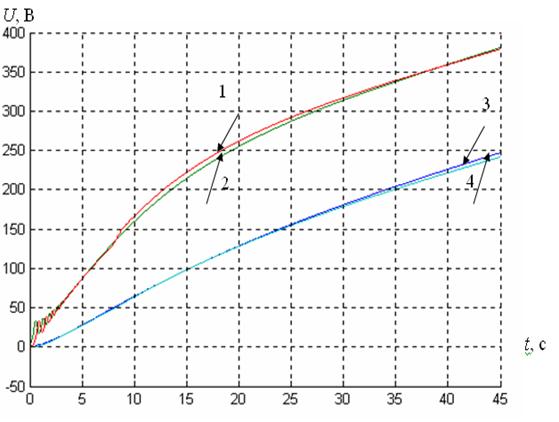
Рис. 4.15. Залежності U(t).
На рис. 4.16 представлені криві зміни модулів струмів для похідної (базової) моделі системи керування (крива 1) і моделі з використанням нейронних мереж (крива 2) за тих самих умов руху.
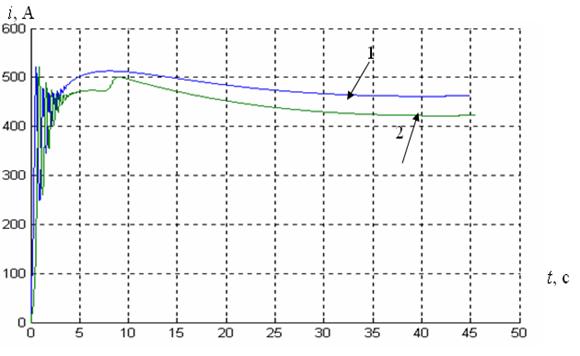
Рис. 4.16. Залежності i(t).
Як критерій оптимальності використовувався критерій мінімуму енергетичних витрат при виконанні обмежень по величині пройденого шляху і швидкості в кінцевий момент часу. Розглядалися різні режими роботи електропривода, зокрема , розгін дизель-потяга за заданий час t і оцінювалися отримані характеристики (швидкість, пройдений шлях і енергетичні витрати) у кінцевий момент часу. Отримані результати (швидкість у кінцевий момент часу, пройдений шлях і енергетичні витрати) для різних мас складу (другий стовпець таблиці, задається через відношення числа пара полюсів Р к моменту інерції J) представлені в таблиці 4.2.
У першому рядку таблиці приведені результати розгону дизель-потяга за час 45секунд до швидкості 38,16 м/с без використання НС, при цьому енергетичні витрати склали 5255 кВт/год, а пройдений шлях 255,3 м. При включенні в систему керування нейронних мереж отриманий виграш по енергетичних витратах 4,5%, хоча кінцева швидкість у даному випадку виявилася меншої на 0,55 м/с. Однак при збільшенні завантаженості складу (рядок 3) отримані енергетичні витрати на 3,2% менше при практично рівних кінцевих швидкостях і пройдених шляхах.
Таблиця 4.2. Результати досліджень.
| № | p/J | t, с | V, км/г | S, м | Е, кВт/г | |||
| 1 | 2 | 1 | 2 | 1 | 2 | |||
| 1 | 0,0001 | 45 | 38,16 | 37,61 | 255,3 | 257,1 | 5255 | 5014 |
| 2 | 0,0002 | 30 | 69,92 | 68,93 | 298,8 | 305,7 | 8755 | 8351 |
| 3 | 0,00009 | 30 | 24,27 | 24,12 | 103,4 | 103,9 | 2416 | 2337 |
| 4 | 0,0001 | 45 | 38,16 | 40,06 | 255,3 | 259,2 | 5255 | 5251 |
| 5 | 0,0002 | 30 | 69,92 | 72,44 | 298,8 | 302,6 | 8755 | 8759 |
| 6 | 0,00009 | 30 | 24,27 | 26,31 | 103,4 | 104,2 | 2416 | 2422 |
| 7 | 0,0001 | 40 | 32,54 | 32,61 | 234,2 | 243,5 | 4762 | 4621 |
| 8 | 0,0002 | 35 | 75,53 | 75,51 | 324,3 | 335,2 | 9867 | 9754 |
| 9 | 0,00009 | 30 | 24,27 | 24,32 | 103,4 | 110,6 | 2416 | 2384 |
У рядках 4 - 6 таблиці 4.2 представлені результати розгону дизель-потяга за час t. У цьому випадку використовувався критерій: одержати велику кінцеву швидкість при однакових енергетичних витратах. У рядках 7-9 критерієм було одержати більший пройдений шлях при менших енергетичних витратах.
Виходячи з проведених результатів дослідження, можна зробити висновок, що введення нейронних мереж до складу системи керування дозволяє оптимізувати роботу енергетичної системи дизель-потяга в процесі розгону, забезпечуючи при цьому виконання заданих граничних умов. При цьому економія по енергетичних витратах складає не менш 3,2% у порівнянні з досліджуваним експериментальним зразком системи керування дизель-потяга.
Похожие работы
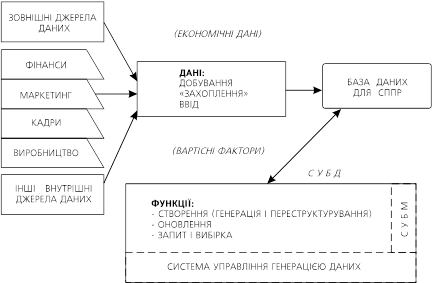
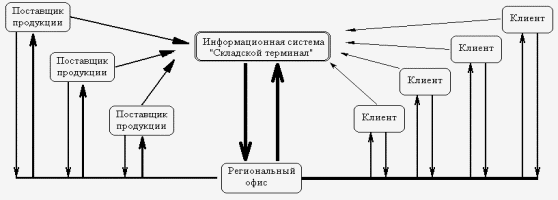
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...
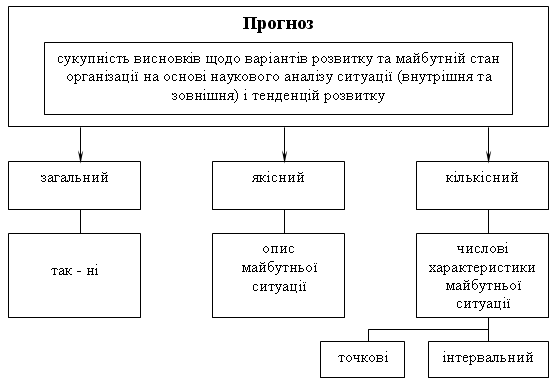

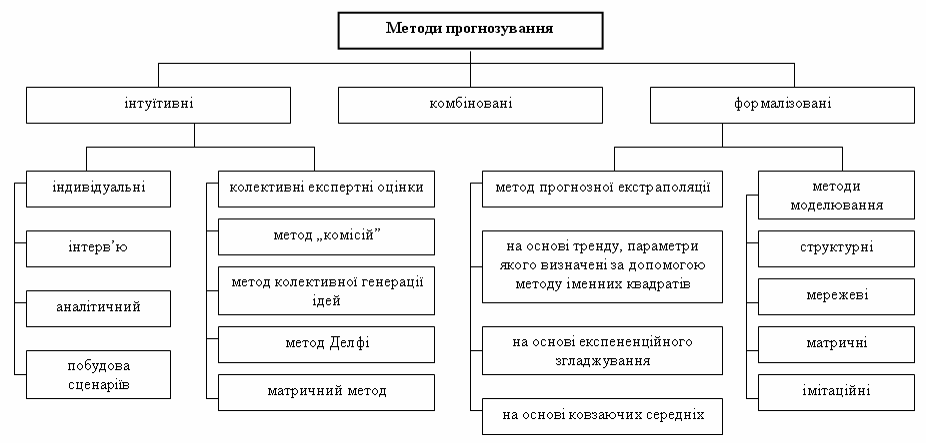
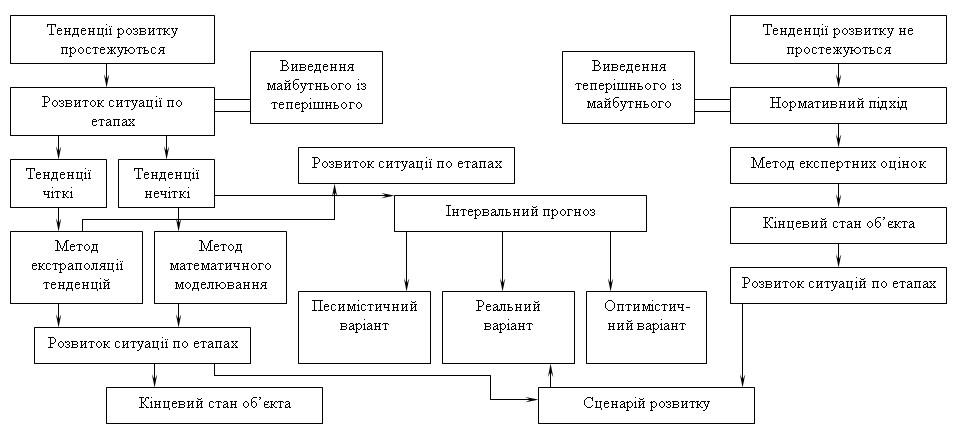
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
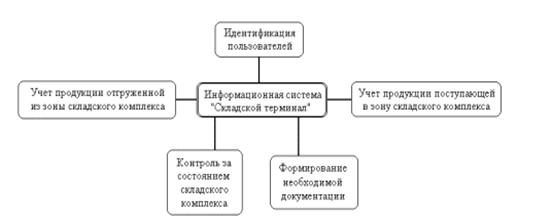
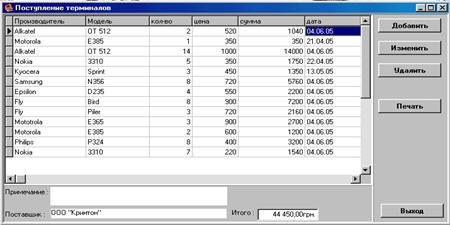
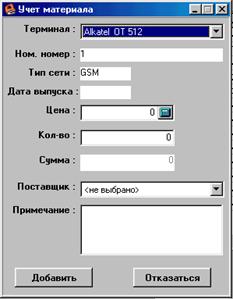
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев