АНАЛІЗ МЕТОДІВ РОЗРОБКИ СИСТЕМ КЕРУВАННЯ ЕЛЕКТРОПРИВОДОМ ДИЗЕЛЬ-ПОТЯГУ
РОЗРОБКА МОДЕЛІ СИСТЕМИ КЕРУВАННЯ ЕЛЕКТРОПЕРЕДАЧІ ДИЗЕЛЬ-ПОТЯГУ
Моделювання пристроїв САК об’єкта керування
Розробка моделі блоку «синхронний генератор-випрямлювач» електропередачі дизель-потягу з використанням нейронних мереж
РОЗРОБКА СИСТЕМИ КЕРУВАННЯ ЗА ДОПОМОГОЮ МЕТОДІВ НЕЧІТКОЇ ЛОГІКИ І НЕЙРОННИХ МЕРЕЖ ДЛЯ ОПТИМІЗАЦІЇ ДИНАМІЧНИХ ПРОЦЕСІВ ЕЛЕКТРОПРИВОДА
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка системи керування дизель-потяга на основі нейромережевих технологій
ДОСЛІДЖЕННЯ СИСТЕМ КЕРУВАННЯ ДИЗЕЛЬ-ПОТЯГА
Дослідження регуляторів системи керування, розроблених на основі використання методів нечіткої логіки і нейромережевих технологій
ЕКОНОМІЧНА ОЦІНКА Й ОБГРУНТУВАННЯ
Конкуренція
Оцінка ризику та страхування
Параметри мікроклімату
Випромінювання від екрана
ЦИВІЛЬНА ОБОРОНА
Навигация
Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Розробка, дослідження системи керування на основі нейронної мережі
162243
знака
21
таблица
52
изображения
3.3 Розробка регуляторів системи керування електропередачі дизель-потяга з використанням нейронних мереж
Система автоматичного регулювання електропередачі дизель-потяга складається з ряду аналогічних каналів регулювання, кожний з який виконує визначені функції (обмеження максимальне припустимого струму навантаження генератора, підтримка сталості потужності, обмеження максимально допустимої напруги). САР об'єкта керування являє собою структуру, що змінюється в процесі функціонування в залежності від сформованих експлуатаційних умов (режимів ведення поїзда, навантаження і т.п.), змінюються і параметри структури САР (наприклад, постійні часу задатчиків інтенсивності каналів регулювання). Відповідно до цього рішення питань, пов'язаних з розробкою регуляторів системи керування пропонується здійснити за допомогою штучних нейронних мереж.
Система автоматичного регулювання служить для формування керуючого впливу ![]() по збудженню. Формування сигналу
по збудженню. Формування сигналу ![]() з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення в контур регулювання пристроїв, що функціонують згідно визначених алгоритмів, таких як пропорційних, інтегральних, пропорційно-інтегральних чи більш складних, якщо не можна досягти заданих показників шляхом застосування одного з названих алгоритмів. У випадку застосування пропорційно-інтегрального закону керування (алгоритму) формування величини може бути здійснене на підставі співвідношення:
з урахуванням забезпечення динамічних показників системи здійснюється шляхом включення в контур регулювання пристроїв, що функціонують згідно визначених алгоритмів, таких як пропорційних, інтегральних, пропорційно-інтегральних чи більш складних, якщо не можна досягти заданих показників шляхом застосування одного з названих алгоритмів. У випадку застосування пропорційно-інтегрального закону керування (алгоритму) формування величини може бути здійснене на підставі співвідношення:
 , (3.14)
, (3.14)
де
![]() - напруга генератора;
- напруга генератора;
![]() - коефіцієнт підсилення пропорційної складової;
- коефіцієнт підсилення пропорційної складової;
![]() - постійна часу інтегрування;
- постійна часу інтегрування;
р - оператор Лапласа.
Величина ![]() формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі:
формується з використанням блоку задавання інтенсивності, що забезпечує темп наростання відповідного сигналу в перехідному режимі:
![]() , (3.15)
, (3.15)
де ![]() - вхідний сигнал за датчика інтенсивності;
- вхідний сигнал за датчика інтенсивності;
![]() - постійна часу.
- постійна часу.
У загальному випадку величина є нелінійною функцією, що залежить від швидкості зміни вхідного сигналу.
Зв'язок між сигналом керування і сигналом завдання на підставі рівнянь (3.14) і (3.15) описується передатною функцією виду:
![]() .
(3.16)
.
(3.16)
При дослідженні САР, описуваної рівняннями (3.14) і (3.15), виходячи з виду передатної функції (3.16), з метою уточнення її структури і параметрів, у першому наближенні побудови моделі нейроконтролера, можемо скористатися передавальною функцією виду:
![]() , (3.17)
, (3.17)
де ![]() ;
; ![]() ;
; ![]() .
.
Використовуючи передавальну функцію САР об'єкта керування (3.17) можемо скласти систему диференціальних рівнянь виду:
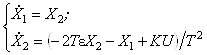 , (3.18)
, (3.18)
де ![]() - вихідний сигнал об'єкта керування (у нашому випадку
- вихідний сигнал об'єкта керування (у нашому випадку ![]() );
);
U - формований сигнал керування (у нашому випадку ![]() ).
).
Як відзначалося вище, структура САР СГ містить три аналогічних канали, описуваних однотипними рівняннями виду (3.14) і (3.15), кожний з який включається в роботу за певних умов. До того ж, у залежності від умов експлуатації, необхідно здійснювати деяке підстроювання параметрів схем САР кожного з каналів. За умови створення моделі САР з використанням нейромережевих технологій, узагальнену структуру такої моделі можна представити у виді, зображеному на рис. 3.9.
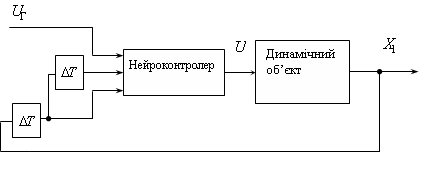
Рис.3.9 Узагальнена структура моделі САР для одного каналу.
Тут як динамічний об'єкт виступає модель СГ (модель у розділі 2.3) і його САР, описувана рівняннями (3.14) і (3.15). У якості нейроконтролера обраний перцептрон - прямо спрямована нейронна мережа. Структура нейроконтролера: три ретрансліруючих вузли на вході мережі, п'ять вузлів із сигмоїдальними активаційними функціями в схованому шарі й один вихідний нейрон, що описує зміну напруги генератора під впливом сигналу керування U. На вхідні нейрони надходить сигнал завдання ![]() і вихідний сигнал
і вихідний сигнал ![]() , що знімається з виходу об'єкта, затриманий на один і два такти (DТ). При дослідженнях, як сигнал завдання
, що знімається з виходу об'єкта, затриманий на один і два такти (DТ). При дослідженнях, як сигнал завдання ![]() , використовувалася типова функція впливу у виді одиничного сигналу.
, використовувалася типова функція впливу у виді одиничного сигналу.
Для навчання мережі використовується генетичний алгоритм (ГА), що набудовує параметри нейроконтролера не за помилкою в керуванні U, а за помилкою на виході об'єкта, порівнюючи його з виходом еталонної моделі (рис. 3.10).
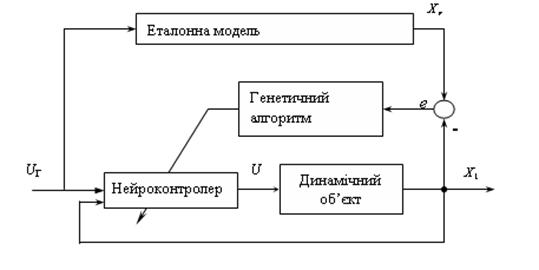
Рис. 3.10. Застосування ГА для настроювання параметрів нейроконтролера.
Вихідна популяція зі 100 хромосом генерувалася випадковим образом. Кожний з 26 параметрів мережі кодується 16 бітами, у такий спосіб хромосома, що кодує нейроконтроллер, являє собою 416 розрядну послідовність нулів і одиниць. Діапазон зміни кожного з параметрів прийнятий від -1 до +1. 16-розрядне кодування забезпечує дискретність зміни параметра не гірше ніж ![]() .
.
При одиничному вхідному впливі на об'єкт керування, описуваний системою рівнянь (3.18), якість системи оцінюється перехідною характеристикою. При визначених значеннях параметрів САР спостерігаються процеси, що відповідають хитливому характеру роботи системи, стійкому і на границі стійкості. Задача нейроконтролера - визначення параметрів САР, що забезпечують стійкість системи і необхідні показники якості, такі як величина перерегулювання, число перерегулювань і час перехідного процесу. При цьому САР у цьому випадку повинна формувати такі керуючі впливи, під впливом яких сигнал на виході об'єкта керування відповідав сигналу завдання, що формується за допомогою еталонної моделі (різниця сигналів UГ і X1 повинна бути мінімальної).
Результати роботи нейроконтролера приведені у виді осцилограм на рис..11, 3.12.
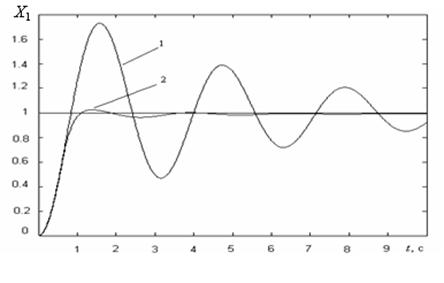
Рис. 3.11. Залежність X1 з використанням нейроконтролера та без.
На рис. 3.11. приведені перехідні процеси змінної ![]() у відносних одиницях без використання системи керування на основі нейроконтроллера (крива 1) і з його використанням (крива 2) при завданні на вхід об'єкта сигналу одиничної амплітуди.
у відносних одиницях без використання системи керування на основі нейроконтроллера (крива 1) і з його використанням (крива 2) при завданні на вхід об'єкта сигналу одиничної амплітуди.
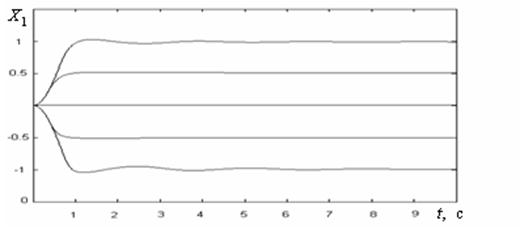
Рис. 3.12. Залежність при різних вхідних впливах.
Рис. 3.12 ілюструє поводження об'єкта не тільки на тренувальних шаблонах, але і на проміжних значеннях амплітуди вхідного сигналу, що підтверджує універсальність апроксимуючих здібностей нейронних мереж і можливість використання розробленого нейроконтролера для формування сигналів керування напругою порушення синхронного генератора електропередачі дизель-потяга.
Похожие работы
... інші території. На додаток до цього моделі прогнозування в СППР та основані на реальних знаннях системи часто використовуються як настільні, розраховані на одного користувача системи. Системи підтримки прийняття рішень набули широкого застосування в економіках передових країн світу, причому їхня кількість постійно зростає. На рівні стратегічного управління використовується ряд СППР, зокрема для ...

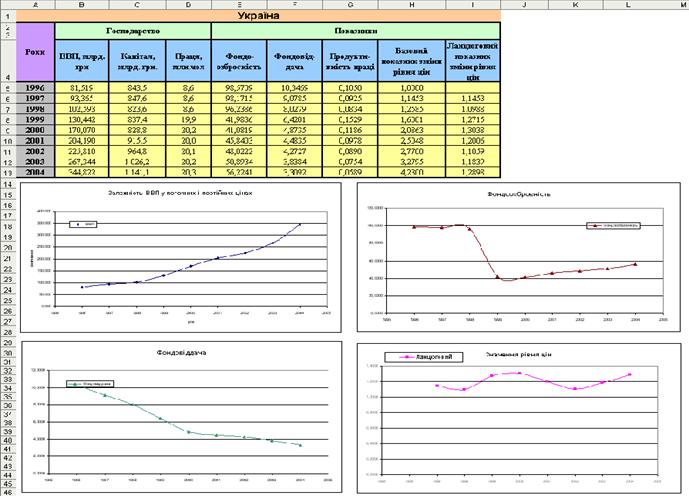
... періоді. Цей прогноз після Кабінету Міністрів України його головних показників є орієнтиром для підготовки пропозицій про визначення економічної політики на середньостроковий період. 3. ПРОГНОЗУВАННЯ РОЗВИТКУ ДИНАМІКИ УКРАЇНИ ЯК ГОСПОДАРСЬКОЇ СИСТЕМИ Порядок виконання роботи: а) Введення вихідних даних і одержання похідних рядів. Ввів в таблицю часові ряди, що відповідають вихідним даним ...
... різця й шорсткості обробленої поверхні; - розробити методику оцінки й визначити ймовірність руйнування різців, які оснащені круглими алмазно-твердосплавними пластинами. Об'єкт досліджень – процес чистового та напівчистового точіння силумінів різцями, які оснащені АТП. Предмет досліджень – надійність інструментів з алмазних композиційних НТМ на прикладі АТП, реєстрація та аналіз сигналів АЕ. ...
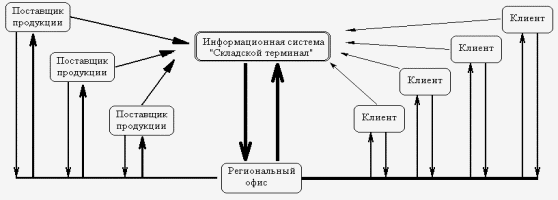
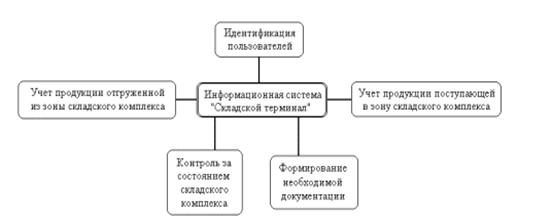
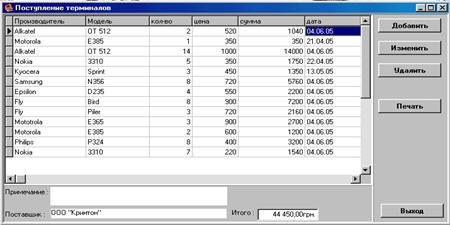
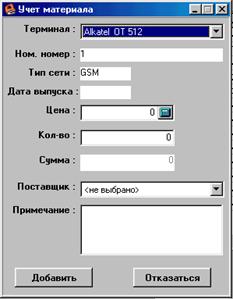
... , хоча воно й може змінюватися при зміні інформації, що зберігається в базі даних. 2.4 Опис програми, форм, звітів Файлом, що запускає інформаційну систему «Облік мобільних терміналів» є здійсненний файл PR.EXE. Розглянемо дії користувача при роботі з системою. Оператор системи обліку і аналізу розрахунків з постачальниками (менеджер) запускає програму на виконання (виконувальний файл PR.exe ...
0 комментариев