Производство электроэнергии с помощью ветроэнергетических установок
Классификация ВЭУ
Классификация по типу применяемой электромашины
СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
Основы механики электропривода
Диапазон регулирования – отношение максимальной возможной скорости к минимальной
Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал
Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
Ограничение коммутационных перенапряжений
Конструктивный расчет сглаживающего реактора
Электробезопасность экспериментальной установки
Расчет автоматического защитного отключения
Построение оптимизированной модели СПП с выбором оптимальной индуктивности реактора
Проверка степени защиты оболочки корпуса экспериментальной установки проводится по методике ГОСТ 14254
Навигация
СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
Разработка ветроэнергетической установки
103372
знака
3
таблицы
44
изображения
2 СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
2.1 Структура электропривода
Электропривод – электромеханическая система, состоящая в общем случае из взаимодействующих электрических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними сопредельными электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Базовым элементом любого электропривода является электрическая машина (электродвигатель), осуществляющая собственно электромеханическое преобразование энергии. Оснащение электропривода силовыми электронными преобразователями электрической энергии и микропроцессорными информационно-управляющими устройствами превращает его в мощный интеллектуальный инструмент автоматизации различных производственных и технологических процессов. Такой привод является регулируемым автоматизированным электроприводом.
Электропривод имеет два канала – силовой и информационный (рис. 2.1). По первому транспортируется преобразуемая энергия (широкие стрелки на рис. 2.1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие стрелки на рис. 2.1).
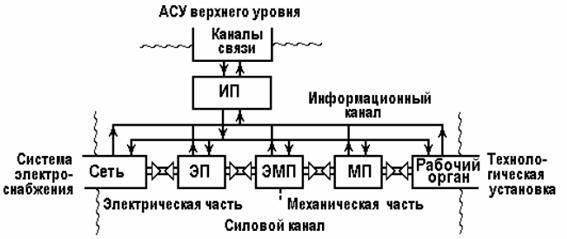
Рисунок 2.1 – Общая структура электропривода
Силовой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит связующее звено – электромеханический преобразователь.
В электрическую часть силового канала входят устройства электрический преобразователь ЭП, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т. п.) к электромеханическому преобразователю ЭМП и обратно и осуществляющие, если это нужно, преобразование электрической энергии.
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется механическая энергия. Электромеханический преобразователь ЭМП (электродвигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М, ω) и обратно.
Электродвигатели различают:
- по роду тока (постоянного, переменного);
- по количеству и схеме соединения обмоток;
- по конструктивному исполнению.
Наиболее распространенные электродвигатели:
- коллекторные двигатели постоянного тока (ДПТ) с независимым (параллельным), последовательным, смешанным возбуждением;
- двигатели переменного тока асинхронные с короткозамкнутым ротором АД КЗ, асинхронные с фазным ротором АД ФР, синхронные СД.
Электрическая машина работает в результате взаимодействия изменяющихся во времени магнитного поля (потока) и тока в контуре. Что изменяется, не важно:
- в ДПТ – неподвижный магнитный поток полюсов статора и движущаяся обмотка якоря с переменным током;
- в АД – вращающееся магнитное поле статора и вращающаяся, но с другой скоростью, обмотка ротора с током.
В ДПТ обмотки размещены на статоре и на роторе.
Статор ДПТ – индуктор с главными полюсами, на которых размещены обмотки возбуждения, создающие магнитный поток Ф. Здесь же могут быть размещены добавочные полюса и компенсационная обмотка, которые не участвуют в процессе электромеханического преобразования.
Ротор ДПТ – якорь с обмоткой якоря и коллектором. Токоподвод к обмотке якоря обеспечивает щеточный механизм. Коллектор является механическим преобразователем подводимого постоянного тока в переменный ток обмотки якоря.
Механический преобразователь (передача) – редуктор, пара винт-гайка, система блоков, кривошипно-шатунный механизм и т. п. осуществляет согласование момента М и скорости ω двигателя с моментом Мм (усилием Fм) и скоростью ωм рабочего органа технологической машины.
Величины, характеризующие преобразуемую энергию, – напряжения, токи, моменты (силы), скорости называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т. е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешенных конструкцией элементов электропривода, чем обеспечивается надежность работы системы. Эти допустимые пределы обычно связаны с номинальными значениями координат, назначенными производителями оборудования и обеспечивающими его оптимальное использование.
Электропривод взаимодействует с системой электроснабжения или источником электрической энергии, с одной стороны, с технологической установкой или машиной, с другой стороны, и наконец, через информационный преобразователь ИП с информационной системой более высокого уровня, часто с человеком – оператором, с третьей стороны (рис. 2.1).
Можно считать, что электропривод как подсистема входит в указанные системы, являясь их частью. Действительно, специалиста по электроснабжению электропривод обычно интересует как потребитель электроэнергии, технолога или конструктора машин – как источник механической энергии, инженера, разрабатывающего или эксплуатирующего АСУ, – как развитый интерфейс, связывающий его систему с технологическим процессом или системой электроснабжения.
Практически все процессы, связанные с механической энергией, движением, осуществляются электроприводом. Исключение составляют лишь автономные транспортные средства (автомобили, самолеты, некоторые виды подвижного состава, судов), использующие неэлектрические двигатели. В относительно небольшом числе промышленных установок используется гидропривод, еще реже – пневмопривод.
Столь широкое, практически повсеместное распространение электропривода обусловлено особенностями электрической энергии – возможностью передвигать ее на любые расстояния, постоянной готовностью к использованию, легкостью превращения в любые другие виды энергии.
Сегодня в приборных системах используются электроприводы, мощность которых составляет единицы микроватт; мощность электропривода компрессора на перекачивающей газ станции – десятки мегаватт, т. е. диапазон современных электроприводов по мощности превышает 1012. Такого же порядка и диапазон по частоте вращения: в установке, где вытягиваются кристаллы полупроводников, вал двигателя должен делать 1 оборот в несколько десятков часов при очень жестких требованиях к равномерности движения; частота вращения шлифовального круга в современном хорошем станке может достигать 150000 об/мин.
Но особенно широк диапазон применений современного электропривода: от искусственного сердца до шагающего экскаватора, от вентилятора до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность – теснейшее взаимодействие с технологической сферой – оказывала и оказывает на электропривод мощное стимулирующее влияние. Непрерывно растущие требования со стороны технологических установок определяют развитие электропривода, совершенствование его элементарной базы, его методологии. В свою очередь, развивающийся электропривод положительно влияет на технологическую сферу, обеспечивает новые, недоступные ранее возможности.
С энергетической точки зрения электропривод – главный потребитель электрической энергии: сегодня в развитых странах он потребляет более 60% всей производимой электроэнергии. В условиях дефицита энергетических ресурсов это делает особенно острой проблему энергосбережения в электроприводе и средствами электропривода.
Специалисты считают, что сегодня сэкономить единицу энергетических ресурсов, например 1 т условного топлива, вдвое дешевле, чем ее добыть. Нетрудно видеть, что в перспективе это соотношение будет изменяться: добывать топливо становится всё труднее, а запасы его всё убывают.
2.2 Классификация электроприводов
Многообразие производственных процессов обусловливает различные виды и характеры движения рабочих органов машины, а следовательно, и электроприводов.
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т. п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические двигатели и др.).
По степени управляемости электропривод может быть:
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый – для сообщения изменяемой или неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый – управляемый в соответствии с заданной программой;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
Похожие работы
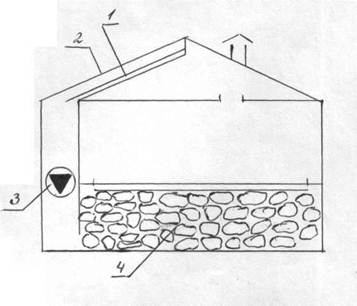
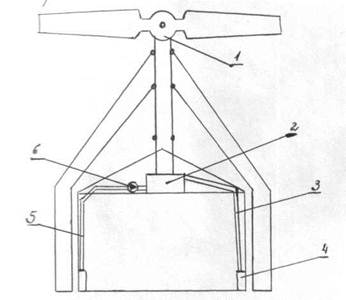
... – нагнетательный насос 2. Выбор и обоснование конструкции энергоагрегата. Для энергоснабжения материального склада мы выбираем ветроэнергетическую установку, т.к. использование солнечных коллекторов в зимнее время неэффективно. По заданию нам дана ветроэнергетическая установка с вертикальным валом. Такая установка дает нам возможность разместить редуктор и ...


... формулой: , (2.3.14.) где: Eа- емкость аккумулятора, А ч; Uа- напряжение аккумулятора, В. Принимаем Еа = 10(6СТ-210) = 2100 Ач. Таким образом, параметры энергосистемы на основе ВИЭ следующие: Основной источник В-установка, Рв= 3 кВт; Дополнительный источник С-установка, Рс= 0,72 кВт; Резерв, аккумуляторы 6СТ-75 Еа= 10*210 =2100 Ач. 3. ...
... северных регионов за счет возведения двойной оболочки здания с использованием солнечной энергии можно обеспечить до 40% экономии тепла. Учитывая развитие технологий возобновляемой энергетики, с должной долей уверенности можно сказать о реальной возможности создания эффективной системы энергоснабжения удаленных от центральной энергосети сельских домов при условии комбинированного использования ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
0 комментариев