Производство электроэнергии с помощью ветроэнергетических установок
Классификация ВЭУ
Классификация по типу применяемой электромашины
СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
Основы механики электропривода
Диапазон регулирования – отношение максимальной возможной скорости к минимальной
Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал
Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
Ограничение коммутационных перенапряжений
Конструктивный расчет сглаживающего реактора
Электробезопасность экспериментальной установки
Расчет автоматического защитного отключения
Построение оптимизированной модели СПП с выбором оптимальной индуктивности реактора
Проверка степени защиты оболочки корпуса экспериментальной установки проводится по методике ГОСТ 14254
Навигация
Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал
Разработка ветроэнергетической установки
103372
знака
3
таблицы
44
изображения
1. Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал.
2. Регулируемая величина на выходе электропривода по возможности не должна зависеть от возмущающих воздействий на электропривод. Такими возмущающими воздействиями могут быть напряжение питания, температура, момент нагрузки, временные зависимости параметров и т. д.
Поэтому основным принципом управления является принцип обратной связи, позволяющий осуществить контроль качества регулирования по отклонению управляемого параметра от заданного. Каждый элемент функциональной схемы электропривода описывается в статике и динамике передаточной функцией.
В электроприводе в основном применяются три структуры построения:
- с промежуточным суммирующим элементом;
- с независимым регулированием параметров;
- с подчиненным регулированием.
Наибольшее применение получили два типа построения замкнутых систем регулирования:
1) с одним общим суммирующим усилителем (рис. 2.9, а);
2) с n последовательными суммирующими усилителями (рис. 2.9, б) – системы подчиненного регулирования с последовательной коррекцией.
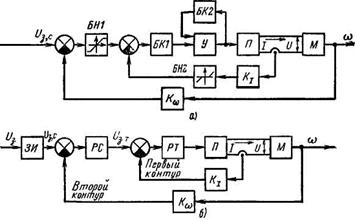
Рисунок 2.9 – Структурные схемы замкнутых систем регулирования: а) с общим суммирующим усилителем; б) с n последовательными суммирующими усилителями
Отличительной особенностью систем построенных по типу структурной схемы, приведенной на рис. 2.9, а, является наличие одного суммирующего усилителя (У), на вход которого подается алгебраическая сумма сигнала задающего и всех обратных связей жестких и гибких (суммирование может быть как электрическое, так и магнитное). Выходной сигнал усилителя, таким образом, зависит сразу от нескольких переменных, что делает практически невозможным регулирование какой-то одной переменной независимо от других.
Для разделения действия обратных связей применяют отсечки (блоки нелинейностей БН1, БН2). Но и в этом случае единственный (общий для всех обратных связей) задающий сигнал не определяет заданного значения выбранной для регулирования переменной. Придание системе требуемых динамических свойств при таком построении системы обычно достигается применением сложных корректирующих устройств, включаемых в цепь сигнала управления при малой мощности управления (блок БК1 – последовательная коррекция) или параллельно некоторым блокам системы (параллельная коррекция – гибкая отрицательная обратная связь, блок БК2). При этом нельзя осуществить независимую настройку качества регулирования всех переменных. В целом получить требуемое высокое или оптимальное качество регулирования в таких системах крайне затруднительно, а в ряде случаев и невозможно.
Но несмотря на указанные недостатки, системы, построенные по типу структурной схемы, приведенной на рис. 2.9, а, находили и еще находят широкое применение либо из-за простоты реализации при использовании громоздких электромашинных, силовых магнитных и электронно-ламповых усилителей, либо в случаях, когда не предъявляются жесткие требования к качеству переходных процессов и не требуется раздельное регулирование переменных, либо когда относительно простыми средствами удается достигнуть требуемого качества процессов.
С появлением малогабаритных и относительно дешевых полупроводниковых, в частности интегральных операционных усилителей и тиристорных преобразователей с малой мощностью управления открылась возможность строить системы подчиненного регулирования с последовательной коррекцией, в которых используется n последовательных суммирующих усилителей (рис. 2.9, б). На эти усилители возлагаются функции не только суммирования и усиления сигналов, но и выполнения некоторых других математических операций над сигналами, поэтому суммирующие усилители в этих системах называют регуляторами.
Система подчиненного регулирования (см. рис. 2.9, б) состоит из ряда контуров, число которых равно числу регулируемых переменных (или числу больших постоянных времени системы, подлежащих компенсации), причем каждый внутренний контур регулирования подчинен следующему по порядку внешнему (по отношению к внутреннему) контуру. Эта подчиненность выражается в том, что заданное значение регулируемой переменной любого внутреннего контура определяется выходным сигналом регулятора следующего по порядку контура. В результате все внутренние контуры работают как подчиненные задаче регулирования выходной координаты системы. Каждый контур строится по принципу регулирования по отклонению (по ошибке) и имеет свою обычно жесткую отрицательную обратную связь по регулируемой переменной и свой регулятор (суммирующий усилитель). Для каждого внешнего контура внутренний контур (или несколько внутренних контуров) входит в состав объекта регулирования.
Показанная на рис. 2.9, б структура системы привода постоянного тока с двигателем независимого возбуждения имеет два контура регулирования: первый (внутренний) контур – контур регулирования тока якоря двигателя, содержащий регулятор тока РТ, преобразователь П, якорную цепь двигателя и жесткую отрицательную обратную связь по току якоря с коэффициентом передачи k1; второй (контур внешний, которому подчинен первый контур) – контур регулирования угловой скорости двигателя, содержащий регулятор скорости PC, первый контур, двигатель М и жесткую отрицательную обратную связь по скорости с коэффициентом передачи kω. Задающим сигналом для второго контура является сигнал задания угловой скорости UЗ,C, а для первого — сигнал с выхода регулятора скорости UЗ,Т.
В системе подчиненного регулирования появляется возможность раздельного регулирования переменных и раздельной настройки контуров (начиная с первого, самого внутреннего контура) и коррекции переходных процессов в каждом контуре, что существенно упрощает как расчетную работу, так и техническую реализацию коррекции и практическую (в наладке) настройку системы.
Похожие работы
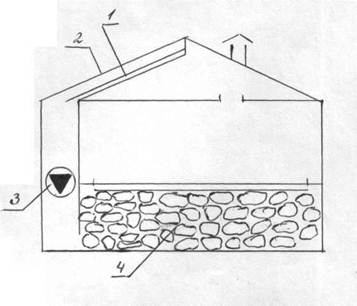
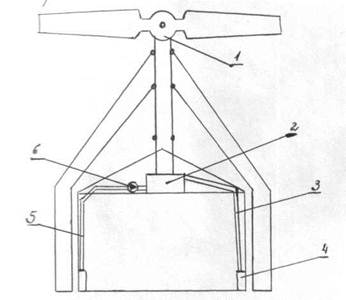
... – нагнетательный насос 2. Выбор и обоснование конструкции энергоагрегата. Для энергоснабжения материального склада мы выбираем ветроэнергетическую установку, т.к. использование солнечных коллекторов в зимнее время неэффективно. По заданию нам дана ветроэнергетическая установка с вертикальным валом. Такая установка дает нам возможность разместить редуктор и ...


... формулой: , (2.3.14.) где: Eа- емкость аккумулятора, А ч; Uа- напряжение аккумулятора, В. Принимаем Еа = 10(6СТ-210) = 2100 Ач. Таким образом, параметры энергосистемы на основе ВИЭ следующие: Основной источник В-установка, Рв= 3 кВт; Дополнительный источник С-установка, Рс= 0,72 кВт; Резерв, аккумуляторы 6СТ-75 Еа= 10*210 =2100 Ач. 3. ...
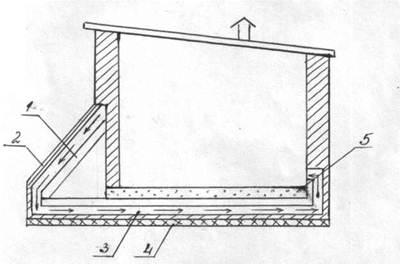
... северных регионов за счет возведения двойной оболочки здания с использованием солнечной энергии можно обеспечить до 40% экономии тепла. Учитывая развитие технологий возобновляемой энергетики, с должной долей уверенности можно сказать о реальной возможности создания эффективной системы энергоснабжения удаленных от центральной энергосети сельских домов при условии комбинированного использования ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
0 комментариев