Производство электроэнергии с помощью ветроэнергетических установок
Классификация ВЭУ
Классификация по типу применяемой электромашины
СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
Основы механики электропривода
Диапазон регулирования – отношение максимальной возможной скорости к минимальной
Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал
Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
Ограничение коммутационных перенапряжений
Конструктивный расчет сглаживающего реактора
Электробезопасность экспериментальной установки
Расчет автоматического защитного отключения
Построение оптимизированной модели СПП с выбором оптимальной индуктивности реактора
Проверка степени защиты оболочки корпуса экспериментальной установки проводится по методике ГОСТ 14254
Навигация
Диапазон регулирования – отношение максимальной возможной скорости к минимальной
Разработка ветроэнергетической установки
103372
знака
3
таблицы
44
изображения
2. Диапазон регулирования – отношение максимальной возможной скорости к минимальной
![]()
При заданных изменениях момента нагрузки (рис. 2.6). Одинаковым естественным характеристикам и изменениям момента ∆Mс могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
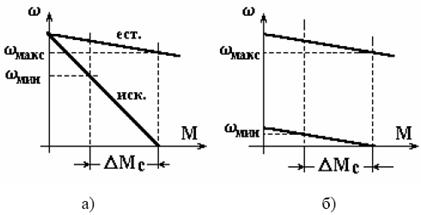
Рисунок 2.6 – К определению диапазона регулирования скорости
С жесткостью характеристик связан также еще один показатель – стабильность скорости на искусственных характеристиках. Она может быть низкая (рис. 2.6, а) и высокая (рис. 2.6, б); иногда требуется абсолютно жесткие характеристики (β = ∞), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
3. Плавность регулирования – возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, – плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик – ступенчатое регулирование.
4. Допустимая нагрузка на искусственных характеристиках – очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению – это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя:
![]() (2.10)
(2.10)
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с
![]()
Грубая оценка (2.10) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность ![]() с потребляемой из сети Р1, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке:
с потребляемой из сети Р1, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке:
 (2.11)
(2.11)
Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД ηЦ определяемом с учетом конкретных условий работы привода за время цикла tц.
 (2.12)
(2.12)
Электромеханическое преобразование энергии в ДПТ осуществляется в результате взаимодействия постоянного магнитного потока статора и переменного во времени, но неподвижного в пространстве тока якоря. Благодаря фиксированному положению щеточного механизма векторы потока Ф и тока якоря Iя сдвинуты на постоянный угол ![]() /2, что обеспечивает получение максимального момента М.
/2, что обеспечивает получение максимального момента М.
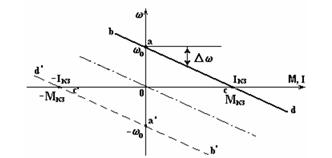
Рисунок. 2.7 – Механические (электромеханические) характеристики электропривода постоянного тока независимого возбуждения
Анализ уравнений механической и электромеханической характеристик ДПТ показывает три возможных способа регулирования его скорости и момента:
- введение добавочного резистора Rдоб в цепь якоря;
- изменение напряжения Uя питания якорной цепи;
- изменение магнитного потока Ф путем регулирования тока возбуждения.
В различных по способу возбуждения ДПТ по разному проявляется зависимость магнитного потока от тока якоря Ф(Iя) и соответствующим образом отличаются характеристики (рис. 2.7).
Различают однозонное регулирование вниз от основной скорости, однозонное регулирование вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной. [10]
Двигатель постоянного тока независимого возбуждения, который используется в имитационной установке, имеет две зоны регулирования (рис. 2.8). Зона I отвечает регулированию с постоянным моментом. Действительно, если регулирование осуществляется изменением сопротивления или напряжения главной цепи при неизменном номинальном магнитном потоке двигателя, то при номинальном токе якоря допустимый момент будет постоянным.
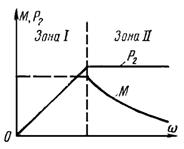
Рисунок 2.8 – Характеристики двух зон регулирования двигателя постоянного тока независимого возбуждения
![]() (2.13)
(2.13)
Мощность на валу двигателя в этой зоне изменяется по линейному закону, так как она пропорциональна угловой скорости:
![]() (2.14)
(2.14)
Зона II отвечает регулированию с постоянной мощностью, когда оно производится изменением магнитного потока двигателя.
В этом случае при неизменном токе якоря, равном номинальному, магнитный поток с увеличением угловой скорости необходимо регулировать по закону гиперболы. Если решить это уравнение относительно магнитного потока, то получим:
![]() (2.15)
(2.15)
Таким образом, становится явной зависимость допустимого момента от угловой скорости в зоне регулирования II, а именно:
![]() (2.16)
(2.16)
Отсюда следует, что мощность в этой зоне регулирования остается постоянной, так как:
![]() (2.17)
(2.17)
Требования высокой точности регулирования и высокого быстродействия, которые предъявляются к современному электроприводу, обуславливают применение замкнутых систем. Только замкнутые системы позволяют осуществить реализацию в электроприводе двух основных принципов:
Похожие работы
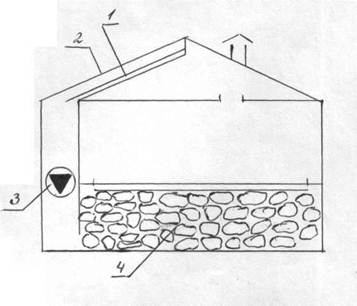
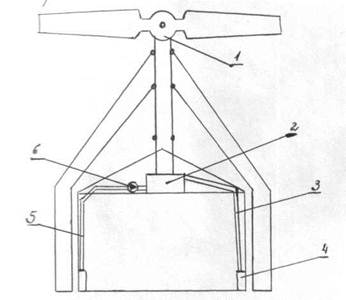
... – нагнетательный насос 2. Выбор и обоснование конструкции энергоагрегата. Для энергоснабжения материального склада мы выбираем ветроэнергетическую установку, т.к. использование солнечных коллекторов в зимнее время неэффективно. По заданию нам дана ветроэнергетическая установка с вертикальным валом. Такая установка дает нам возможность разместить редуктор и ...


... формулой: , (2.3.14.) где: Eа- емкость аккумулятора, А ч; Uа- напряжение аккумулятора, В. Принимаем Еа = 10(6СТ-210) = 2100 Ач. Таким образом, параметры энергосистемы на основе ВИЭ следующие: Основной источник В-установка, Рв= 3 кВт; Дополнительный источник С-установка, Рс= 0,72 кВт; Резерв, аккумуляторы 6СТ-75 Еа= 10*210 =2100 Ач. 3. ...
... северных регионов за счет возведения двойной оболочки здания с использованием солнечной энергии можно обеспечить до 40% экономии тепла. Учитывая развитие технологий возобновляемой энергетики, с должной долей уверенности можно сказать о реальной возможности создания эффективной системы энергоснабжения удаленных от центральной энергосети сельских домов при условии комбинированного использования ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
0 комментариев