Производство электроэнергии с помощью ветроэнергетических установок
Классификация ВЭУ
Классификация по типу применяемой электромашины
СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
Основы механики электропривода
Диапазон регулирования – отношение максимальной возможной скорости к минимальной
Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал
Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
Ограничение коммутационных перенапряжений
Конструктивный расчет сглаживающего реактора
Электробезопасность экспериментальной установки
Расчет автоматического защитного отключения
Построение оптимизированной модели СПП с выбором оптимальной индуктивности реактора
Проверка степени защиты оболочки корпуса экспериментальной установки проводится по методике ГОСТ 14254
Навигация
Основы механики электропривода
Разработка ветроэнергетической установки
103372
знака
3
таблицы
44
изображения
2.3 Основы механики электропривода
Самая простейшая механическая система, состоящая из ротора двигателя и непосредственно связанной с ним нагрузки – рабочего органа машины представлена рис. 2.2. Несмотря на простоту, система вполне реальна: именно так реализована механическая часть ряда насосов, вентиляторов, многих других машин.
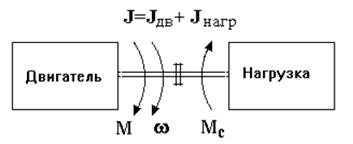
Рисунок 2.2 – Модель механической части
К системе на рис. 2.2 приложены два момента – электромагнитный момент М, развиваемый двигателем, и момент Мс, создаваемый нагрузкой, а также потерями механической части (трение); каждый момент имеет свою величину и направление. Движение системы определяется вторым законом Ньютона:
 (2.1)
(2.1)
где ω – угловая скорость,
J – суммарный момент инерции.
Правая часть уравнения (2.1) – динамический момент
Он возникает, если алгебраическая сумма моментов М и Мс отлична от нуля; величина и знак динамического момента определяют ускорение.
Режимы, при которых ∑M = 0, т. е. моменты М и Мс равны по величине и противоположно направлены, называют установившимися или статическими, им соответствует ω = const, в том числе ω= 0.
Режимы, когда ∑M ≠ 0 , называют переходными или динамическими (ускорение, замедление).
В уравнении (2.1) момент Мс практически полностью определяется свойствами нагрузки, а момент М, который можно принять за независимую переменную, формируется двигателем. Скорость ω – зависимая переменная; ω(t) определяется в динамических режимах решением (2.1) для любых конкретных условий, а в статических режимах находится из условия:
![]() (2.2)
(2.2)
2.4 Электроприводы постоянного тока
Для получения простейшей модели электропривода постоянного тока, описывающей установившиеся (статические) режимы и позволяющей получить основные характеристики, воспользуемся схемой на рис. 2.3.
Якорная цепь питается от независимого источника с напряжением U, сопротивление цепи якоря R постоянно, магнитный поток Ф определяется лишь током возбуждения и не зависит от нагрузки (реакция якоря не проявляется), индуктивные параметры цепей пока не учитываются, поскольку рассматриваются лишь установившиеся (статические) режимы.
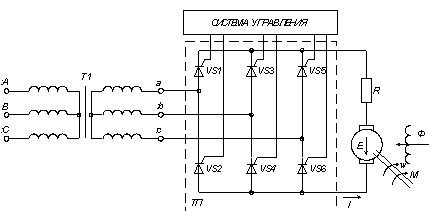
Рисунок 2.3 – Схема электропривода с двигателем постоянного тока
Взаимодействие тока I в обмотке якоря с магнитным потоком Ф, создаваемым обмотками, расположенными на полюсах машины, приводит в соответствии с законом Ампера и возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитного момента М:
![]() (2.3)
(2.3)
где k – конструктивный параметр машины.
В движущихся с угловой скоростью ω в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения Е:
![]() (2.4)
(2.4)
направленная в рассматриваемом случае встречно по отношению к вызвавшей движение причине – ЭДС источника питания U.
В соответствие со вторым законом Кирхгоффа для якорной цепи машины справедливо уравнение:
![]() (2.5)
(2.5)
Уравнения (2.3) – (2.5) – простейшая, но достаточная для понимания главных процессов в электроприводе постоянного тока модель. Для решения практических задач они должны быть дополнены уравнением движения с моментом потерь ∆M, входящим в Мс:
 (2.6)
(2.6)
и уравнениями цепи возбуждения для конкретной схемы электропривода.
Если существовал некоторый установившийся режим М1 = Мс1, а затем Мс изменился, например, возрос до величины Мс2, то для получения нового установившегося режима необходимо иметь средство, которое изменило бы М, приведя его в соответствие с новым значением Мс. В двигателе внутреннего сгорания эту роль выполнит оператор, увеличив подачу топлива; в паровой турбине – специальный регулятор, который увеличит подачу пара. В электрической машине эту роль выполнит ЭДС. Действительно, при возрастании Мс скорость двигателя начнет снижаться, значит уменьшится и ЭДС (полагаем для простоты, что Ф, а также U и R – постоянные). Из (2.5) следует, что:
![]() (2.7)
(2.7)
Следовательно, ток вырастет, обусловив тем самым рост момента в соответствии с (2.3). Двигатель автоматически, без каких-либо внешних воздействий перейдет в новое установившееся состояние. Эти процессы будут иметь место при любых величинах и знаках Мс, т. е. ЭДС будет выполнять функцию регулятора как в двигательном, так и в тормозных режимах работы машины.
2.4.1 Механические характеристики двигателя постоянного тока независимого возбужденияРежим и параметры электропривода определяют механическая характеристика ω(M) электродвигателя и механическая характеристика ω(Мс) механизма, приведенная к валу электродвигателя.
Различают естественную и искусственные механические характеристики электродвигателей.
Естественная характеристика соответствует основной схеме включения и номинальным (паспортным) параметрам питающего напряжения. Естественная характеристика – единственная для данного двигателя.
Искусственные характеристики определяются схемой включения и параметрами питающего напряжения, отличными от номинальных. Их может быть множество – семейство.
Для получения уравнения механической характеристики необходимо найти зависимость скорости от момента двигателя. Это легко сделать, если учесть, что момент М, развиваемый двигателем, связан с током якоря и магнитным потоком зависимостью (2.3).
Если в (2.5) вместо Е подставим ее значение Е из (2.4), то получим уравнение для скорости двигателя:
![]() (2.8)
(2.8)
Уравнение (2.8) представляет собой зависимость скорости двигателя от тока якоря. Такую зависимость ω=f(I) называют электромеханической характеристикой двигателя.
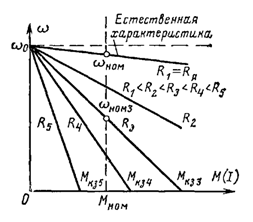
Рисунок 2.4 – Естественная характеристика и семейство реостатных механических характеристик двигателя постоянного тока независимого возбуждения
Подставив в (2.8) значение тока I, найденное из (2.3), получим выражение для механической характеристики:
![]() (2.9)
(2.9)
Коэффициент k принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная обмотка. Он может считаться неизменным, если для обычных двигателей пренебречь реакцией якоря.
Механическая характеристика (рис. 2.4) двигателя при неизменных параметрах U, Ф и R представляется прямой линией. Изменяя тот или иной параметр механической характеристики, можно при определенном моменте сопротивления на валу двигателя получать различные скорости двигателя, т. е. регулировать скорость электропривода.
2.5 Основные показатели регулирования угловой скорости электроприводовКак отмечалось выше, основная функция электропривода состоит в управлении его координатами – скоростью и моментом, т. е. в их принудительном направленном изменении в соответствии с требованиями технологического обслуживаемого процесса.
Очень важный частный случай управления координатами – регулирование скорости или момента, т. е. принудительное изменение этих величин в установившемся режиме в соответствии с требованиями технологического процесса посредством воздействия на механическую характеристику двигателя. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты.
Чаще всего регулируемой координатой служит скорость: необходимо изменять скорость транспортного средства в зависимости от условий движения, состояния дороги и т. п., нужно регулировать скорость насоса, чтобы обеспечивать нужный напор в системе водоснабжения, требуется поддерживать на заданном уровне скорость движения жилы кабеля в процессе наложения на нее изоляции и т. п.
Понятие “регулирование скорости”, когда используются разные характеристики (рис. 2.5, а), не следует смешивать с изменением скорости, даже значительным, которое вызывается ростом или снижением нагрузки и происходит в соответствии с формой данной механической характеристики (рис. 2.5, б).
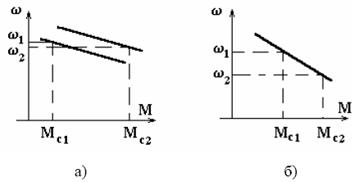
Рисунок 2.5 – Регулирование (а) и изменение (б) скорости
В ряде случаев оказывается необходимым регулирование момента. Оно потребуется, например, если нужно качественно укладывать на катушку проволоку, получаемую с волочильного стана, если при буксировке судна на больших волнах надо не допустить обрыва троса и т. п. Далее мы будем, в основном, рассматривать регулирование скорости.
Поскольку регулирование скорости связано с направленным формированием механических характеристик, выделим одну из возможных характеристик в качестве основной. Обычно в качестве основной характеристики принимают естественную характеристику двигателя, соответствующую номинальным значениям определяющих ее величин (напряжение, частота, магнитный поток и т. п.).
Все другие характеристики, создаваемые в целях регулирования скорости, будем называть искусственными. Они могут формироваться разными способами, отличающимися как по техническим, так и по экономическим показателям, рассматриваемым ниже.
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной – однозонное регулирование вниз от основной скорости, только выше естественной – однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной – двухзонное регулирование.
Похожие работы
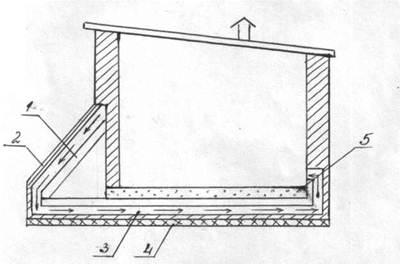
... – нагнетательный насос 2. Выбор и обоснование конструкции энергоагрегата. Для энергоснабжения материального склада мы выбираем ветроэнергетическую установку, т.к. использование солнечных коллекторов в зимнее время неэффективно. По заданию нам дана ветроэнергетическая установка с вертикальным валом. Такая установка дает нам возможность разместить редуктор и ...


... формулой: , (2.3.14.) где: Eа- емкость аккумулятора, А ч; Uа- напряжение аккумулятора, В. Принимаем Еа = 10(6СТ-210) = 2100 Ач. Таким образом, параметры энергосистемы на основе ВИЭ следующие: Основной источник В-установка, Рв= 3 кВт; Дополнительный источник С-установка, Рс= 0,72 кВт; Резерв, аккумуляторы 6СТ-75 Еа= 10*210 =2100 Ач. 3. ...
... северных регионов за счет возведения двойной оболочки здания с использованием солнечной энергии можно обеспечить до 40% экономии тепла. Учитывая развитие технологий возобновляемой энергетики, с должной долей уверенности можно сказать о реальной возможности создания эффективной системы энергоснабжения удаленных от центральной энергосети сельских домов при условии комбинированного использования ...
... соответствующие требованиям технической. 5 Энерго- и материалосбережение Для эффективного материалосбережения при разработке энергосберегающей системы освещения были применены следующие методы: 1. Уменьшение размеров печатной платы за счет увеличения плотности компоновки и рационального использование пространства платы, что экономит текстолит, затрачиваемый на изготовление платы. ...
0 комментариев