ПОСТАНОВКА ЗАДАЧИ
Гироскопический измеритель вектора угловой скорости
Аппроксимация плотности земной атмосферы аналитическими зависимостями
Гироскопический измеритель угловой скорости
Определим число импульсов [6, 10, 14]
Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм стабилизации
Решение задачи идентификации отказов
Алгоритм контроля отказов ДС при неполной тяге
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Моделирование отказов ГИВУС
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Расчет сметы затрат на НИР
Расчет научно-технического эффекта
Заключение
ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
Производственная санитария
Техника безопасности
Пожарная безопасность
СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с
Навигация
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
175590
знаков
30
таблиц
100
изображений
6 ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Достижения научно-технического прогресса в последние десятилетия позволили человечеству решить многие неразрешимые ранее технические и теоретические вопросы. Так, сегодня повседневным явлением стали запуски искусственных спутников Земли, космических аппаратов с человеком на борту, беспилотные межорбитальные аппараты, полёты автоматических станций. Одной из неотъемлемых составляющих космического аппарата – является система управления, включающая в себя командные приборы, исполнительные органы, БЦВМ и программный комплекс. Системы управления, относятся к разряду сложных систем с большим количеством элементов, которые подвержены отказам. Одним из основных требований, предъявляемых к системе управления, является ее высокая надежность. Управление космическим аппаратом с помощью БИНС рассматривается как взаимодействие двух процессов: решение навигационной задачи и решение задачи стабилизации. Первая задача заключается в определение требуемой траектории космического аппарата и в вычислении фактической, вторая – в управлении аппаратом для поддержания требуемого курса с заданной точностью. В БИНС инерциальный координатный базис строится не с помощью гироплатформы, а на основе математических расчетов проводимых в БЦВМ непосредственно в полете. Отказ реактивных двигателей стабилизации системы управления ориентацией космического аппарата, может приводить к не выполнению целевой задачи, а отказ типа «не отключение» двигателя, может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов.
6.1 Обзор существующих методов
Отказ от использования гиростабилзированной платформы и перехода к бесплатформенным инерциальным навигационным системам связан с повышением точности командных приборов и интенсивным развитием цифровой вычислительной техникой, что позволяет решать задачу построения базовой ориентации математическими методами с использованием БЦВМ [1-5]. Наряду с этим значительно повышается сложность математической модели НКА и алгоритмов для системы управления ориентацией. Одной из важных задач, является идентификация отказов исполнительных органов СУО. Отказ ДС типа «не отключение» может привести к большим потерям рабочего тела и невыполнению целевой задачи СУО. Существующий метод идентификации отказов ДС как большой тяги так и малой, основан на контроль опасной продолжительности работы двигателей и подсчете времени базы ![]() . Опасная продолжительность формируется в зависимости от значения управляющего момента [25]. При этом рассматривается два типа отказов – отказ типа «не включение» и отказ типа «не отключения». При этом на всех базах выбирается максимальный ОП и находится с помощью метода статистических гипотез критическая точка, позволяющая принять решение – есть отказ или нет. Максимальная точность выявлений отказа ДС с остаточной тягой, при использовании данного метода – 51% [25]. При превышении этого порога, алгоритм контроля двигателей стабилизации системы управления ориентацией космического аппарат не выявляет отказ. Это приводит к большим потерям рабочего тела, а следовательно и к значительным экономическим затратам, а также к невыполнению целевой задачи СУ, и как следствие срыву полетного задания, а иногда и полной потери управления КА [25, 26].
. Опасная продолжительность формируется в зависимости от значения управляющего момента [25]. При этом рассматривается два типа отказов – отказ типа «не включение» и отказ типа «не отключения». При этом на всех базах выбирается максимальный ОП и находится с помощью метода статистических гипотез критическая точка, позволяющая принять решение – есть отказ или нет. Максимальная точность выявлений отказа ДС с остаточной тягой, при использовании данного метода – 51% [25]. При превышении этого порога, алгоритм контроля двигателей стабилизации системы управления ориентацией космического аппарат не выявляет отказ. Это приводит к большим потерям рабочего тела, а следовательно и к значительным экономическим затратам, а также к невыполнению целевой задачи СУ, и как следствие срыву полетного задания, а иногда и полной потери управления КА [25, 26].
Предлагаемый в данной дипломной работе алгоритм контроля СУО основан на использовании субоптимального дискретного фильтра Калмана-Бьюси. Анализ величины оцениваемого в фильтре Калмана возмущающего момента позволяет вычислить математической ожидание оценки возмущения. Если математическое ожидание оценки возмущающего момента, вычисленного на некоторой временной базе, где управление равно нулю, превосходит допустимый порог, то принимается решение об отказе ДС и переходе на резерв. Как показало моделирование понижение остаточной тяги при отказе ДС в пять раз меньше, чем у существующих алгоритмов контроля, и составляет 10%. Это значительно повышает надежность СУО. А процент не выявления (10%) составляет процент внешних возмущающих воздействий, таких как аэродинамические и гравитационные. Это говорит о высокой эффективности разработанного алгоритма [25, 26].
Также в данной дипломной работе, разработан алгоритм контроля командных приборов ГИВУС и ДУП [21]. Отказ командным приборов может приводить к невыполнению целевой задачи СУ. Существующие алгоритмы имеют высокую погрешность при выявлении отказов чувствительных элементов. В основу существующих алгоритмов положен либо фильтр первого порядка, либо наблюдатель Люинбергера. Для повышения точности выявления отказавшего чувствительного элемента, в данной дипломной работе разработаны алгоритмы контроля командных приборов СУО, на основе субоптимального дискретного фильтра Калмана-Бьюси. Проведенное моделирование, показало высокую эффективность разработанного алгоритма по сравнению с существующими. В результате было повышено время выявления отказа чувствительный элемент, более точно выявляется отказавший чувствительный элемент [21, 25].
Разработанные алгоритмы контроля командных приборов и исполнительных органов в значительной мере повышают надежность системы управления ориентацией космического аппарата, и позволяют избежать потерь рабочего тела, и способствуют выполнению целевой задачи СУ. Это позволит снизить затраты на командные приборы и исполнительные органы, а также экономические затраты связанные с отказами в полете исполнительных органов и командных приборов [1, 3, 25].
Похожие работы
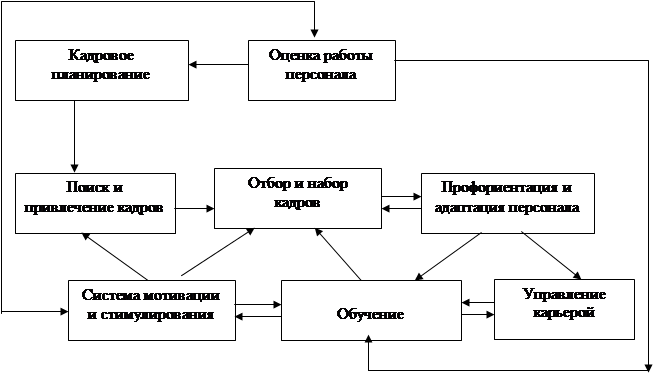

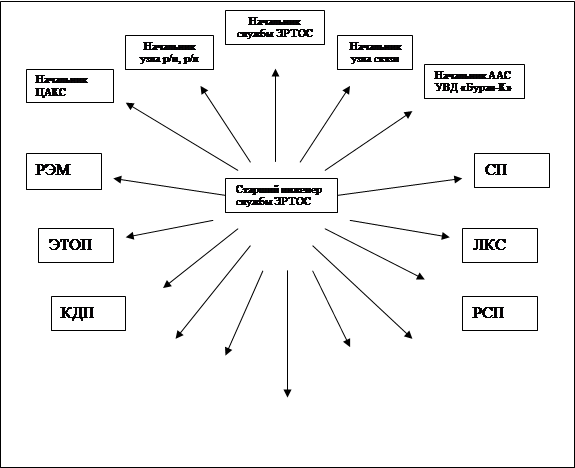
... удостоверение установленной формы. 3. Предложения по повышению эффективности системы управления персоналом в службе ЭРТОС филиала «Аэронавигация Центральной Волги» ФГУП «Госкорпорация по ОрВД» Анализ существующей системы управления персоналом в службе ЭРТОС показал, что требуется совершенствование существующей системы оплаты труда, необходимо уделить внимание подготовке кадрового ...
... определенной долей государственного регулирования, направленного на достижение оптимального соотношения притязаний предпринимателя в его деятельности по получению прибыли и принципа общественной справедливости. 2.2.Проблемы управления фирмой в условиях рынка При переходе к рыночной экономике предприятия России столкнулись с массой проблем, решить которые все разом оказалось большинству из них ...
... техника одержали новую выдающуюся победу, Успешно выполнен испытательный запуск универсальной ракетно-космической транспортной системы "Энергия" и орбитального корабля "Буран". Подтверждены правильность принятых инженерных и конструкторских решений, эффективность методов экспериментальной отработки и высокая надежность всех систем этого сложнейшего ...
... элементов, глобальное пространство имен, а также лавинообразную первоначальную загрузку сети. Таким образом ОСРВ SPOX имеет необходимые механизмы для создания отказоустойчивой распределенной операционной системы реального времени, концепция построения которой описана в главе 2. 4.3 Аппаратно-зависимые компоненты ОСРВ Модули маршрутизации, реконфигурации, голосования реализованы как аппаратно- ...
0 комментариев