ПОСТАНОВКА ЗАДАЧИ
Гироскопический измеритель вектора угловой скорости
Аппроксимация плотности земной атмосферы аналитическими зависимостями
Гироскопический измеритель угловой скорости
Определим число импульсов [6, 10, 14]
Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм стабилизации
Решение задачи идентификации отказов
Алгоритм контроля отказов ДС при неполной тяге
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Моделирование отказов ГИВУС
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Расчет сметы затрат на НИР
Расчет научно-технического эффекта
Заключение
ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
Производственная санитария
Техника безопасности
Пожарная безопасность
СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с
Навигация
Определим число импульсов [6, 10, 14]
Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
175590
знаков
30
таблиц
100
изображений
9. Определим число импульсов [6, 10, 14].
Для k=1...6:
![]()
где U[k] – промежуточная переменная;
![]() - сумма импульсов k-го ЧЭ за все такты;
- сумма импульсов k-го ЧЭ за все такты;
![]() - промежуточное значение цены импульсов;
- промежуточное значение цены импульсов;
![]() - промежуточное значение погрешности цены импульсов.
- промежуточное значение погрешности цены импульсов.
![]()
где ![]() - сумма импульсов k-го ЧЭ за такт;
- сумма импульсов k-го ЧЭ за такт;
Ent{…} – операция выделения целой части.
![]() .
.
4 АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА
4.1 Синтез наблюдателя Льюинбергера
Рассмотрим объект, описываемый уравнениями [7, 22]:
 (4.1)
(4.1)
 (4.2)
(4.2)
где х – n-мерный вектор состояния;
u – m-мерный вектор детерминированных (доступных измерению) входных сигналов;
А, В, Н – матрицы размеров nxn, nxm, 1xn.
Предполагая, что известны как измеренные величины скалярный входной сигнал z, матричный входной сигнал u(t) и матрицы объекта А, В, Н, произведем синтез устройства для наблюдения вектора состояния объекта х [7, 22].
Пусть ![]() – оценочное значение вектора х, тогда, согласно (4.2), оценочное значение выходного сигнала
– оценочное значение вектора х, тогда, согласно (4.2), оценочное значение выходного сигнала ![]() . Оценка
. Оценка ![]() содержит ошибку, если
содержит ошибку, если ![]() отличается от значения, полученным реальным измерением сигнала z. задача заключается в том, чтобы ошибку оценивания
отличается от значения, полученным реальным измерением сигнала z. задача заключается в том, чтобы ошибку оценивания ![]() свести к нулю. [7, 16, 22]
свести к нулю. [7, 16, 22]
Зная u(t) А, В и начальное значение x(t0) можно оценить x(t), если подвести сигнал u(t) к электронной модели объекта
 (4.3)
(4.3)
где x(t0) задано.
Недостаток оценивающего устройства (4.3) состоит в том, что он действует по разомкнутому циклу [7, 16, 22]. Поскольку данные об u(t) А, В - неточны, то после некоторого времени работы это устройство будет давать слишком неточную оценку вектора х. Чтобы при сохранении линейности данного устройства устранить отмеченный недостаток, было предложено ошибку ![]() ввести в каждое из уравнений системы (4.3), т.е. перейти к оценивающему устройству (4.4) [22]:
ввести в каждое из уравнений системы (4.3), т.е. перейти к оценивающему устройству (4.4) [22]:
 (4.4)
(4.4)
где
Устройство, описываемое уравнением (4.4), производит оценку вектора х по замкнутому циклу и называется наблюдающим устройством идентификации или фильтром Льюинбергера [7, 16, 22].
Если ошибку оценивания определить как (4.5)
 (4.5)
(4.5)
то эту ошибку можно находить из уравнения (4.6):
 (4.6)
(4.6)
получаемого вычитанием уравнения (4.1) из уравнения (4.4). Выбрав коэффициенты усиления ![]() так, чтобы система (4.6) была устойчивой, получим
так, чтобы система (4.6) была устойчивой, получим  при
при ![]() . Другими словами, с ростом t оценка
. Другими словами, с ростом t оценка ![]() стремится к оцениваемому вектору х(t) [7 , 16].
стремится к оцениваемому вектору х(t) [7 , 16].
Если по измеренному сигналу z(t) объект (4.1) полностью наблюдаем, то выбором коэффициентов ![]() можно замкнутой системе (4.4) придать любое желаемое распределение корней, т.е. можно синтезировать наблюдающее устройство идентификации. Если же по выходному сигналу z(t) вектор состояния объекта х наблюдаем не полностью, то с помощью начальных условий можно оценить лишь наблюдаемую часть вектора состояния [22].
можно замкнутой системе (4.4) придать любое желаемое распределение корней, т.е. можно синтезировать наблюдающее устройство идентификации. Если же по выходному сигналу z(t) вектор состояния объекта х наблюдаем не полностью, то с помощью начальных условий можно оценить лишь наблюдаемую часть вектора состояния [22].
4.2 Алгоритм оценки угловой скорости
Построим систему оценки угловой скорости.
Имеем систему уравнений [1, 3]:
 (4.7)
(4.7)
где ![]() - проекции мгновенной угловой скорости объекта на оси ССК,
- проекции мгновенной угловой скорости объекта на оси ССК,
![]() - моменты инерции объекта,
- моменты инерции объекта,
![]() - управляющий и возмущающий моменты соответственно,
- управляющий и возмущающий моменты соответственно,
i = x, y, z.
Вектор моментов является функцией ![]() . Таким образом, имеется три уравнения, связывающие шесть независимых функций
. Таким образом, имеется три уравнения, связывающие шесть независимых функций ![]() .
.
Получим еще три уравнения при помощи кинематических уравнений, которые в кватернионной форме имеют вид [5]:
 (4.8)
(4.8)
Для малых углов имеем:
 (4.9)
(4.9)
Запишем уравнения (4.7) с учетом (4.9):
 (4.10)
(4.10)
Для построения системы оценки примем следующую модель объекта наблюдения:
где ![]() - оцениваемое приращение угла поворота,
- оцениваемое приращение угла поворота,
u – вектор управления.
Пусть производится измерение приращения угла поворота qj:
![]()
где ![]() - фактический угол поворота объекта за такт БЦВМ.
- фактический угол поворота объекта за такт БЦВМ.
Матрица Н из уравнения (4.8) имеет вид: [1 0 0].
Модель системы наблюдения (4.10) представим в форме Коши:
Тогда система (4.10) примет вид:
 (4.11)
(4.11)
т.е. в векторной форме получим уравнение (4.7), где
Вектор состояния x(t) определяется решением векторно-матричного уравнения (4.7):

где Ф(t, t0) – фундаментальная матрица, являющаяся переходной для (4.7).
Ф(t, t0) = еА(t - t0) (4.12)
Найдем еА(t - t0) используя преобразование Лапласа.
Найдем Ф-1(s):
detФ(s) = S3,
Выполняя обратное преобразование Лапласа, получим фундаментальную матрицу системы (4.12):
Уравнение, оценивающее вектор х, имеет вид [5, 16, 22]:
При малом периоде квантования Т вектор x(t) – линейная функция времени, следовательно [16]:
![]()
Пренебрегая Т2, решение системы (4.11) запишем [7]:
 (4.13)
(4.13)
Модель объекта наблюдения будет иметь вид [7, 16, 22]:
Найдем коэффициенты k1, k2, k3.
Вычитая уравнения (4.11) из уравнений (4.13), получим [7, 16, 22]:

Запишем характеристическое уравнение для этой системы:
![]() (4.14)
(4.14)
Пусть для системы оценки угловой скорости желательны равные отрицательные корни: ![]() Тогда желаемый характеристический полином примет вид:
Тогда желаемый характеристический полином примет вид:
![]() (4.15)
(4.15)
Приравнивая коэффициенты при одинаковых степенях S в уравнениях (4.14)и (4.15), получим [7, 16, 22]:

Произведем аналитическое обоснование выбора коэффициентов усиления алгоритма оценки угловой скорости.
Рассмотрим характеристическое уравнение [16, 22]:
![]()
Приведем его к нормированному виду. Для этого разделим все члены на К3 и введем новую переменную

Получим
![]()
На плоскости параметров А и В построим границу устойчивости. Условия устойчивости имеют вид:
A > 0, B > 0, AB > 1.
Уравнение границы устойчивости имеет вид:
АВ = 1 при A > 0 и B > 0.
Выделим в области устойчивости части, соответствующие различному расположению корней характеристического уравнения [7, 16, 22].
В точке А=В=3 характеристическое уравнение имеет три равных корня q1=q2=q3=1. При этом для исходного уравнения получим:
![]()
Построим области апериодических процессов (все три корня вещественные - III) и колебательных процессов (один корень вещественный и два комплексных). Причем во втором случае будем различать область, где пара комплексных корней лежит ближе к мнимой оси, чем вещественный - I, и область, где вещественный корень лежит ближе к мнимой оси, чем пара комплексных - II.
В соответствии с методикой границы указанных областей описываются уравнениями:
- кривые CE, CF:
![]()
- кривая CD:
![]()
На плоскости К1К2 для фиксированного К3 построим области различного расположения корней внутри каждой части области устойчивости (см. рис. 2.1).
На рис. 4.1 точками A, B, C, D, E показаны значения коэффициентов алгоритма оценки угловой скорости, используемые при моделировании. Численные значения коэффициентов при моделировании выбирались из различных участков (I, II, III) области устойчивости.
Рис. 4.1 - Значения коэффициентов алгоритма оценки угловой скорости
4.3 Алгоритм обработки и контроля информации ГИВУС
Включение ГИВУС производится в режиме ВКЛ.
В режиме ВКЛ после наступления тепловой готовности включаются все шесть ЧЭ ГИВУС. После достижения функциональной готовности (~22 мин с момента включения прибора) производится контроль работоспособности ЧЭ и в случае нормы два ЧЭ отключаются. Эти ЧЭ находятся в «горячем» резерве и в случае необходимости могут быть готовы к работе спустя 1 минуту [21].
Задача обработки и контроля информации ГИВУС состоит из следующих алгоритмов [1, 3, 21]:
1. Алгоритм начальной установки задачи ГИВУС.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС.
3. Алгоритм расчета приращений углов ГИВУС.
4. Алгоритм контроля и формирования признака информативности ГИВУС.
1. Алгоритм начальной установки задачи ГИВУС
Алгоритм рассчитывает матрицу С(6х3) установки шести ЧЭ в приборных осях:
Сi1 = cos(j+dji);
Ci2 = sin(j+dji)×cos((i-1)×q+dqi);
Ci3 = sin(j+dji)×sin((i-1)×q+dqi);
где j, q - углы установки ЧЭ в ПСК;
dji, dqi – погрешности углов установки (і = 1¸6).
Алгоритм также производит обнуление внутренних переменных задачи. По полетному заданию (ПЗ) (параметр IZGIV*) выбирается число включаемых в режиме ЧЭ [21]:
IZGIV*=2 - работа на 5 ЧЭ;
IZGIV*=1 - работа на 4 ЧЭ;
IZGIV*=0 - работа на 3 ЧЭ.
По ПЗ задается признак контроля Zcon:
Zcon = 0 – наличие контроля;
Zcon = 1 – отсутствие контроля.
Алгоритм разовый, работает на первом такте каждого режима.
Похожие работы

... удостоверение установленной формы. 3. Предложения по повышению эффективности системы управления персоналом в службе ЭРТОС филиала «Аэронавигация Центральной Волги» ФГУП «Госкорпорация по ОрВД» Анализ существующей системы управления персоналом в службе ЭРТОС показал, что требуется совершенствование существующей системы оплаты труда, необходимо уделить внимание подготовке кадрового ...
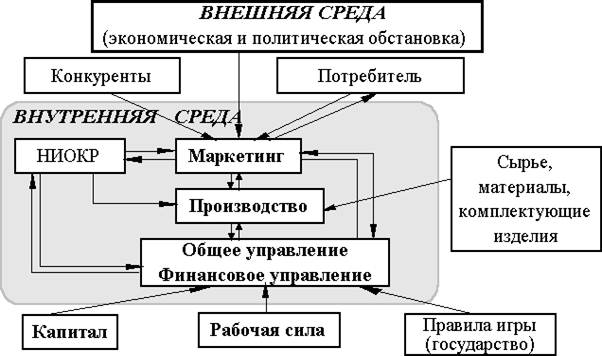
... определенной долей государственного регулирования, направленного на достижение оптимального соотношения притязаний предпринимателя в его деятельности по получению прибыли и принципа общественной справедливости. 2.2.Проблемы управления фирмой в условиях рынка При переходе к рыночной экономике предприятия России столкнулись с массой проблем, решить которые все разом оказалось большинству из них ...
... техника одержали новую выдающуюся победу, Успешно выполнен испытательный запуск универсальной ракетно-космической транспортной системы "Энергия" и орбитального корабля "Буран". Подтверждены правильность принятых инженерных и конструкторских решений, эффективность методов экспериментальной отработки и высокая надежность всех систем этого сложнейшего ...
... элементов, глобальное пространство имен, а также лавинообразную первоначальную загрузку сети. Таким образом ОСРВ SPOX имеет необходимые механизмы для создания отказоустойчивой распределенной операционной системы реального времени, концепция построения которой описана в главе 2. 4.3 Аппаратно-зависимые компоненты ОСРВ Модули маршрутизации, реконфигурации, голосования реализованы как аппаратно- ...
0 комментариев