ПОСТАНОВКА ЗАДАЧИ
Гироскопический измеритель вектора угловой скорости
Аппроксимация плотности земной атмосферы аналитическими зависимостями
Гироскопический измеритель угловой скорости
Определим число импульсов [6, 10, 14]
Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм стабилизации
Решение задачи идентификации отказов
Алгоритм контроля отказов ДС при неполной тяге
РЕЗУЛЬТАТЫ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ
Моделирование отказов ГИВУС
ЭКОНОМИЧЕСКАЯ ЧАСТЬ
Расчет сметы затрат на НИР
Расчет научно-технического эффекта
Заключение
ОХРАНА ТРУДА И ОКРУЖАЮЩЕЙ СРЕДЫ
Производственная санитария
Техника безопасности
Пожарная безопасность
СНиП 2.09.02-85. Строительные нормы и правила. Производственные здания промышленных предприятий. Нормы проектирования.- М.:Стройиздат., 1986, 208 с
Навигация
Алгоритм стабилизации
Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
175590
знаков
30
таблиц
100
изображений
4.4 Алгоритм стабилизации
В правых частях динамических уравнений (1.1) стоят проекции вектора главного момента всех внешних сил М, действующих на корпус космического аппарата : ![]() .
.
Характерной особенностью момента управления ![]() является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент
является активность, он появляется в результате включения вспомогательных органов (в частности реактивных двигателей стабилизации), и исчезает при их отключении. Момент ![]() , следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
, следует логике теории автоматического управления, и обеспечивает заданное угловое движение корпуса космического аппарата [1, 3].
Источником внешнего возмущающего момента ![]() , является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
, является взаимодействие с внешней [1, 4, 6, 10, 12] средой, приводящее к появлению действующих на корпус внешних сил – гравитационного, аэродинамического, светового, магнитного и др. Будем рассматривать гравитационный и аэродинамический моменты. Другие моменты не будем рассматривать в силу их малости.
Момент ![]() имеет две составляющих –
имеет две составляющих – ![]() (создаваемую реактивными двигателями), и
(создаваемую реактивными двигателями), и ![]() (создаваемым моментным магнитоприводом и др. Будем рассматривать только
(создаваемым моментным магнитоприводом и др. Будем рассматривать только ![]() ).
).
Важным свойством динамической системы ориентации является: если осями ориентации являются поступательно движущиеся оси, то при соответствующем законе управления вместо сложных пространственных поворотов космического аппарата можно изучать три независимых плоских угловых движения, что мы и сделаем в системе, т.е.:
 (4.27)
(4.27)
получено три независимых уравнения.
Пусть двигатели работают в импульсном режиме [1, 4, 6, 11, 12]. Зона нечувствительности определяется условием:
![]() . (4.28)
. (4.28)
Для изучения нужного динамического процесса, коэффициенты k в законе управления (Рис. 4.2):
![]() ; (4.29)
; (4.29)
должны быть положительны. Сигнал управления формируется путем сложения сигналов датчика угла и датчика угловых скоростей. Включение двигателей происходит при ![]() . Диаграмма зависимости управляющего момента
. Диаграмма зависимости управляющего момента ![]() от сигнала
от сигнала ![]() имеет вид ( рис 4.3 ) [1 ,3 , 25].
имеет вид ( рис 4.3 ) [1 ,3 , 25].
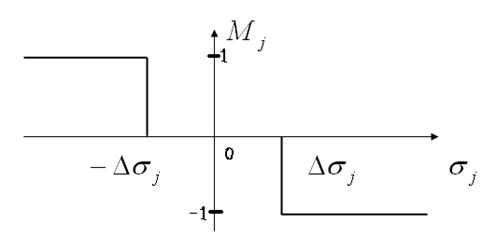

Рис. 4.3 - Изменение управляющего момента со временем в канале X:
Фазовая диаграмма процесса установления ориентации имеет вид (рис 4.2). Заштрихованная область – это комбинация значений ![]() , при которых действует управляющий момент [6]. Линии
, при которых действует управляющий момент [6]. Линии ![]() являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки
являются линиями переключения, т.е. при пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Указанные линии походят через точки ![]() на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
на оси абсцисс, а их наклон зависит от коэффициента k [1, 3, 25]:
 ; (4.30)
; (4.30)

Рис. 4.4 - Фазовый портрет
Также вводятся дополнительные зоны нечувствительности: ![]() ,
,![]() - нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс. Они предназначены для «гашения» больших начальных угловых скоростей [25]. При пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Соответственно дополнительная зона нечувствительности находится между
- нижняя и верхняя линии переключения, располагающиеся параллельно оси абсцисс. Они предназначены для «гашения» больших начальных угловых скоростей [25]. При пересечении этих линий изображающей точкой происходит включение (или выключение) исполнительных органов системы ориентации. Соответственно дополнительная зона нечувствительности находится между ![]() , и
, и ![]() . Фазовый портрет при больших начальных угловых скоростях приведен на (Рис. 4.5)
. Фазовый портрет при больших начальных угловых скоростях приведен на (Рис. 4.5)

Рис. 4.5 - Фазовый портрет с большими начальными угловыми скоростями
Также вводится гистерезис, ![]() - предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии переключения с наклоном -1/K [3].
- предназначенный для гашения шумов при «скольжении» фазовой диаграммы по линии переключения с наклоном -1/K [3].
Рассмотрим КА как упругое тело [1.3.6.7,9,10,11.12]. Уравнения осцилляторов для упругой модели имеет вид [5]:
 (4.31)
(4.31)
где ![]() - коэффициент демпфирования для каждой отдельно взятой гармоники.
- коэффициент демпфирования для каждой отдельно взятой гармоники.
![]() - квадрат собственной частоты не демпфированных колебаний для каждой гармоники.
- квадрат собственной частоты не демпфированных колебаний для каждой гармоники. ![]() - управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты
- управляющий момент с учетом возможного отказа. i = 1,2,3,4. Коэффициенты ![]()
![]()
![]() мы берем из таблицы, приведенной в Приложении А.
мы берем из таблицы, приведенной в Приложении А.
При нулевой правой части, мы получаем свободные колебания, зависящие от начальных отклонений, угловых скоростей и др. При ненулевой правой части мы получаем вынужденные колебания, которые накладываются на свободные колебания. Они являются затухающими со временем, в силу коэффициента демпфирования. Прототипом для данной упругой модели послужил маятник на пружинке. Рассматриваемая система является линейной.
Находим, также как для абсолютно твердого тела, угловые скорости, угловые ускорения, с учетом возможных отказов [25, 26].
Введем в имитационную модель космического аппарата наряду с двигателями большой тяги – двигатели малой тяги. Будем рассматривать двигатели дросселированной тяги, т.е. реактивные двигатели могут работать как с большой тягой, так и с малой. Введем дополнительную зону нечувствительности для двигателей большой тяги. Для более эффективного гашения шумов введем паузу по времени при выходе из зон нечувствительности. Для наглядности введем паузу Tp = 3 сек. Тогда, фазовый портрет для упругой модели, с учетом работы двигателей малой тяги и действующих на космический аппарат аэродинамического и гравитационного моментов, имеет вид (рис 4.6). Так как задана достаточно большая пауза, то процесс может, получился неустойчивым. Таким образом, очень важным фактором является правильный выбор паузы [25].

Рис. 4.6 - Фазовый портрет для большой паузы
Разработанный алгоритм позволяет моделировать сложные физические процессы с учетом внешних факторов действующих во время полета космического аппарата [1, 3, 25].
Похожие работы

... удостоверение установленной формы. 3. Предложения по повышению эффективности системы управления персоналом в службе ЭРТОС филиала «Аэронавигация Центральной Волги» ФГУП «Госкорпорация по ОрВД» Анализ существующей системы управления персоналом в службе ЭРТОС показал, что требуется совершенствование существующей системы оплаты труда, необходимо уделить внимание подготовке кадрового ...
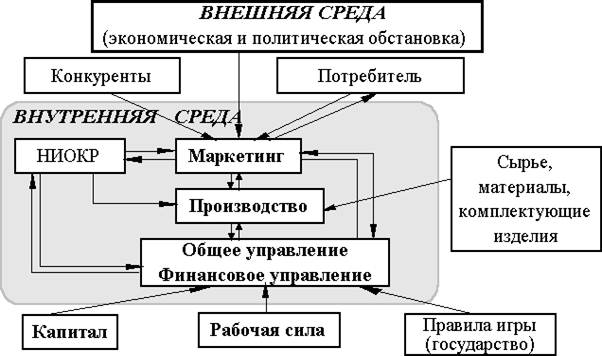
... определенной долей государственного регулирования, направленного на достижение оптимального соотношения притязаний предпринимателя в его деятельности по получению прибыли и принципа общественной справедливости. 2.2.Проблемы управления фирмой в условиях рынка При переходе к рыночной экономике предприятия России столкнулись с массой проблем, решить которые все разом оказалось большинству из них ...
... техника одержали новую выдающуюся победу, Успешно выполнен испытательный запуск универсальной ракетно-космической транспортной системы "Энергия" и орбитального корабля "Буран". Подтверждены правильность принятых инженерных и конструкторских решений, эффективность методов экспериментальной отработки и высокая надежность всех систем этого сложнейшего ...
... элементов, глобальное пространство имен, а также лавинообразную первоначальную загрузку сети. Таким образом ОСРВ SPOX имеет необходимые механизмы для создания отказоустойчивой распределенной операционной системы реального времени, концепция построения которой описана в главе 2. 4.3 Аппаратно-зависимые компоненты ОСРВ Модули маршрутизации, реконфигурации, голосования реализованы как аппаратно- ...
0 комментариев