Техническое описание системы
Анализ существующих средств автоматизации
Требования к системе
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению компонентов системы
Требования к информационному обеспечению
Разработка структурной схемы
Исходные данные
Решение прямой задачи кинематики
Основные принципы конструирования печатных плат
Технология изготовления платы
Навигация
Техническое описание системы
Управление асинхронным двигателем
102925
знаков
0
таблиц
29
изображений
1.2 Техническое описание системы
В основе математического описания АД при переменной частоте питающей сети лежит общая теория электрических машин.
Основой для математического описания АД служат уравнения, составленные в фазовых координатах. Особенностью АД является совокупность магнитосвязанных цепей с коэффициентами само- и взаимоиндукции, периодически изменяющимися в функции угла поворота ротора относительно статора. В зависимости от степени насыщения магнитной системы машины, эти коэффиценты могут зависеть еще и от токов во всех обмотках. Уравнения могут быть составлены либо в трехфазной системе координат, либо в двухфазной для обобщенной машины. При записи уравнений в фазовых координатах получают систему дифференциальных уравнений высокого порядка ( в трехфазной системе координат число уравнений равно 14) с переменными коэффициентами. Пользоваться такой системой для исследования электромеханических процессов, происходящих в АД не представляется возможным в связи с громоздкостью, наличием переменных коэффициетов, нелинейностью. Дальнейшее упрощение и преобразование исходной системы уравнений основывается на следующем общем методе. При этом уравнения в фазовых координатах преобразуются к уравнениям, выраженным через обобщенные (результирующие) векторы, вводится система относительных единиц для токов, напряжений, потокосцеплений, скоростей вращения, частот, моментов, активных, индуктивных сопротивлений. Введение системы относительных единиц упрощает вид уравнений, а выражение переменных через результирующие векторы приводит к виду дифференциальных уравнений, при котором коэффициенты дифференциальных уравнений ненасыщенной машины являются постоянными величинами. Для насыщенной машины необходимо вводить зависимость величин этих коэффициентов от магнитного состояния машины.
После указанных преобразований получают систему дифференциальных уравнений шестого порядка с постоянными коэффициентами, что значительно упрощает описание АД и делает возможным использование этой системы для ииследования электромеханических процессов, протекающих в АД. Дальнейшее преобразование полученной системы уравнений сводится к переводу векторов, входящих в уравнение, в различные системы координат (в зависимости от цели решаемой задачи).
При математическом описании АД принят ряд допущений, соответствующих идеализированному представлению АД:
фазные обмотки сииметричны, одинаковы, воздушный зазор по все окружности ротора одинаков;
не учитываются потери в стали, а также высшие гармоники магнитодвижущей силы и рабочего потока;
параметры АД постоянны и не зависят от токов в обмотках АД;
системы питающих токов (напряжений) симметричны.
Технические характеристики рассматриваемого АД приведены в таблице 1
Таблица 1
| Наименование параметров | Электродвигатель АО2-52-4 |
| 1. Номинальная мощность, Pн | 10 кВт |
| 2. Номинальное напряжение (фазное), Uн | 220 В |
| 3. Номинальный (фазный) ток, Iн | 19 А |
| 4. Номинальная скорость, h | 1460 об/мин |
| 5. Номинальный момент, Mн | 65.4 н.м. |
| 6. Момент инерции, J | 0.09 кг× м2 |
| 7. Число пар полюсов, 2p | 4 |
| 8. Номинальная частота, fн | 50 Гц |
| 9. Активное сопротивление статора, rs | 0.45 Ом |
| 10. Активное сопротивление ротора, rr | 0.7 Ом |
| 11. Индуктивность рассеяния статора, ld s | 43× 10-4 Гн |
| 12. Индуктивность рассеяния ротора, ld r | 51× 10-4 Гн |
| 13. Взаимная индуктивность статора и ротора, Lm | 0.1045 Гн |
Система уравнений для идеализированного трехфазного короткозамкнутого АД в системе координат, вращающейся с поизвольной скоростью w к с использованием системы относительных единиц согласно [ ], имеет вид:
где![]() - обобщенные векторы, соответственно, напряжения, тока, потокосцепления статора;
- обобщенные векторы, соответственно, напряжения, тока, потокосцепления статора;
![]() - обобщенные векторы, соответственно, тока и потокосцепления ротора;
- обобщенные векторы, соответственно, тока и потокосцепления ротора;
![]() - активные сопротивления, соответственно, статора и ротора;
- активные сопротивления, соответственно, статора и ротора;
Lm - взаимная индуктивность статора и ротора;
![]() - индуктивность рассеяния, соответственно, статора и ротора;
- индуктивность рассеяния, соответственно, статора и ротора;
![]() - соответственно, электромагнитный момент и момент сопротивления на валу АД;
- соответственно, электромагнитный момент и момент сопротивления на валу АД;
H - момент инерции ротора АД;
w - угловая скорость вращения ротора АД;
p - символ дифференцирования по времени.
Установившемуся режиму работы АД (все производные в фомуле равны нулю) системе соответствует T-образная схема замещения АД, изображенная на рисунке 1, где Im - ток намагничивания АД; w 1 - частота питающей сети.
При математическом описании АД принята система относительных единиц, базовые значения которой определяются системой:
- базовый ток;
- базовое напряжение;
- базовая скорость;
- базовая частота;
- базовое время;
- базовый момент;
- базовая индуктивность;
- базовое потокосцепление;
- базовое сопротивление;
- базовый момент инерции.
Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления.
В ходе конкретизации из поставленной цели выделены следующие задачи.
Провести анализ известных законов управления применительно к высоковольтным электроприводам и определять на основе анализа рациональные законы и способы частотного управления высоковольтного злектропривода для разрабатываемых АСР.
Синтезировать автоматическую систему регулирования высоковольтного электропривода с трехфазным однообмоточным с учетом следующих требований, предъявляемым к АСР высоковольтного электропривода.
Реализовывать для электроприводов, работающих с постоянным моментом сопротивления в частых пуско-тормозных режимах управление по закону с постоянством потокосцепления ротора, обеспечивающему работу электропривода в интенсивных динамических режимах.
Иметь минимальное количество датчиков на валу и внутри машины.
Иметь минимальное количество датчиков, осуществляющих высоковольтную гальваническую развязку.
Реализовывать управление трехфазным двухобмоточным короткозамкнутым асинхронным двигателем.
Обеспечивать минимальную сложность технической реализации АСР.
Исследовать разработанные АСР в составе электропривода в динамических и статических режимах работы.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке. ОСНОВНАЯ ЧАСТЬ 1 Регулирование скорости вращения асинхронных двигателей Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а ...

... двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода). 1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной ...
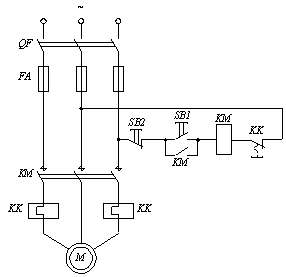
... электроприводов имеет свои недостатки и ограничения. . Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором ...
0 комментариев