Техническое описание системы
Анализ существующих средств автоматизации
Требования к системе
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению компонентов системы
Требования к информационному обеспечению
Разработка структурной схемы
Исходные данные
Решение прямой задачи кинематики
Основные принципы конструирования печатных плат
Технология изготовления платы
Навигация
Технология изготовления платы
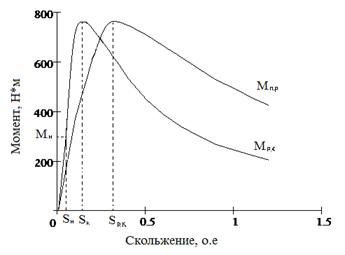
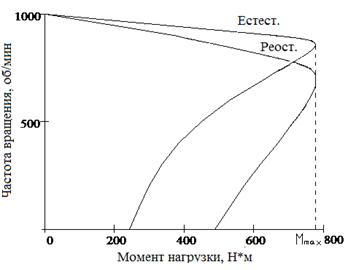
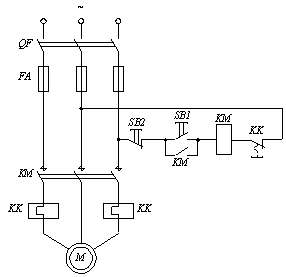
Управление асинхронным двигателем
102925
знаков
0
таблиц
29
изображений
4.3 Технология изготовления платы
Плата модуля ввода аналоговых сигналов изготовлена из стеклотекстолита на фенольной основе (ФС-2-35-1.5). Медная фольга, используемая для плакирования диэлектрика, изготовлена (произведена) гальваническим способом и имеет чистоту не менее 99.5%. Толщина фольги 35 мкм. Качество фольгированных диэлектриков устанавливается специальными техническими условиями или государственными стандартами.
Для получения высокой механической прочности и повышенной техностойкости в качестве наполнителя для диэлектрика применена стеклоткань марки Э толщиной 0.1 мкм. Для максимального использования ее положительных свойств (прочность, теплостойкость, диэлектрические показатели) в качестве связующего применяют эпоксидную смолу ЭД-6, имеющую хорошую адгезию к стекловолокну, обладающую достаточно высокой механической прочностью, хорошими диэлектрическими характеристиками.
Для отвердевания смолы ЭД-6, применяется фенолформальдегидная смола. Стеклоткань пропитывается спиртотолуольным раствором, состоящим из эпоксидной и фенолформальдегидной смол в соотношении 70:30 из расчета сухой основы.
Для склеивания фольги с основанием используется фенолполивинилбутиральный клей марки БФ-4.
При изготовлении данной двусторонней печатной платы использовался метод фотопечати с последующим травлением, т.е. фотохимический метод. Отверстия же в плате металлизируются электрохимическим методом. Таким образом, при изготовлении печатной платы использованы фотохимический и электрохимический способы, поэтому такой метод называется комбинированным. Использован позитивный вариант этого метода, заключающийся в том, что экспонирование рисунка схемы производится с фотопозитива. После экспонирования производится сверление и металлизация отверстий. Затем рисунок схемы и металлический слой в отверстиях защищаются слоем гальванического серебра, после чего производится травление незащищенной меди.
Технологическая схема процесса изготовления печатной платы комбинированным позитивным методом состоит из следующих операций:
обезжиривание поверхности заготовки платы;
нанесение светочувствительной эмульсии (фоторезиста);
экспонирование рисунка схемы (фотопечать);
проявление рисунка;
задубливание фоторезиста;
нанесение защитной пленки лака;
сверление отверстий в плате;
электрохимическая металлизация отверстий;
гальваническое наращивание защитного металла;
удаление защитного слоя фоторезиста;
травление рисунка схемы;
осветление защитного слоя металла.
Технологический процесс изготовления печатной платы комбинированным методом в значительной мере оснащен специальным инструментом и необходимым оборудованием. Ниже приведено более подробное описание некоторых основных операций.
Подготовка поверхности заготовок механическим способом выполнена вручную зачисткой венской известью в смеси с мармалитом. Процесс зачистки производился с помощью хлопчатобумажного тампона.
Химический способ заключается в обезжиривании поверхности в растворе тринатрийфосфата и кальцинированной соды.
Нанесение фоторезиста осуществляется методом окунания заготовки с последующим центрифугированием на стандартной центрифуге типа ЦОМ.
Разработан метод медленного вытягивания заготовки из раствора фоторезиста с последующей сушкой в сушильном шкафу.
Экспонирование рисунка схемы (фотопечать) производится групповым методом в специальных вакуумных рамах с подвижным источником света в установке типа "Сканер" германской фирмы “Видерхольд". В ней применяют мощные лампы со специально подобранной длиной световой волны, к которой наиболее чувствителен фоторезист.
Время экспонирования в такой установке составляет 4-5 минут за счет подбора рациональных источников света и эффективного распределения светового потока на площади экспонируемой платы.
Проявляется изображение рисунка схемы вручную с помощью хлопчатобумажного тампона под струей теплой воды. Установкой для проявления является лабораторный стол с рядом ванн и кюветов.
Фоторезистивный слой проявляется при температуре воды 40-45°С. Контролируется проявление окрашиванием эмульсии в растворе метилфиолета. Дубление проявленного слоя производится в растворе хромового ангидрида.
После того как проявлен рисунок на плате, последняя поступает на операцию сверления, с предварительно нанесенной на нее защитной пленкой лака для предохранения проводников печатной платы от химически активных растворов при химической металлизации отверстий в плате.
Для сверления и зенкования отверстий применяется одношпиндельный станок с программным управлением типа КП-7511.
После сверления выполняется операция металлизации отверстий. Качество печатных плат во многом зависит от качества металлизации отверстий. Вначале проводится сенсибилизация и активация поверхности отверстий, подлежащих металлизации, а затем химическая металлизация.
Химическая металлизация проводится в специальных установках, где предусмотрены следующие операции :
химическое обезжиривание заготовок с последующей промывкой и сушкой воздухом;
сенсибилизация заготовок в растворе двухлористого олова с последующей промывкой и сушкой теплым воздухом;
активизация заготовок в растворе хлористого палладия с последующей промывкой в ванне и сушкой теплым воздухом.
После химической металлизации выполняется операция гальванической металлизации. В качестве электролитического раствора используется борфтористоводородный электролит.
Режим металлизации выбирается таким, чтобы обеспечить толщину слоя осажденной меди в отверстиях 25-40 мк.
После операции гальванической металлизации (меднения), необходимо весь рисунок схемы защитить от травления. Для этого используют покрытие гальваническим сплавом ПОС-61.
После нанесения защитного слоя на печатную схему слой светочувствительной эмульсии удаляется и плата поступает на операцию травления рисунка схемы.
Для травления используется раствор хлорного железа с удельным весом 1.36-1.40 г/мл, температура травления 25-50°C, время травления 10-15 мин.
После тщательной промывки от остатков травящего раствора и сушки выполняется операция осветления серебра (5-10 мин).
После промывки в горячей воде и сушки, платы проходят механическую доработку, затем обработку по контуру и вскрытие отверстий не подлежащих металлизации. Печатные проводники покрываются слоем консервирующего лака.
Для хранения и транспортировки платы упаковывают в полиэтиленовые и полихлорвиниловые мешки, а затем картонные коробки или специальную тару.
{ИСХОДНЫЙ ТЕКСТ ПРОГРАММЫ IM_Main.PAS}
{$IFDEF CPU87} {$N+} {$ELSE} {$N-} {$ENDIF}
{ Программа расчета векторной диаграммы асинхронного двигателя }
program lw(lw);
uses crt,dos,graph,im_tpu;
const {Параметры "Г-образной схемы замещения}
p=2; {Число полюсов}
P2n=75; {Номинальная мощность, кВт}
U1n=220; {Номинальное фазное напряжение, В}
KPDn=0.925; {Номинальный КПД}
Cosn=0.89; {Номинальный Cos(f)}
Sn=0.016; {Номинальное относительное скольжение, о.е.}
Smax=0.1; {Критическое относительное скольжение, о.е.}
J=0.6; {Момент инерции ротора, кг*м^2}
X0=4.6; {Сопротивление взаимоиндукции, о.е.}
R1=0.037; {Активное сопротивление статора, о.е.}
X1=0.1; {Индуктивное сопротивление статора, о.е.}
R2=0.017; {Активное сопротивление ротора, о.е.}
X2=0.16; {Индуктивное сопротивление ротора, о.е.}
R2p=0.036; {Пусковое сопротивление ротора, о.е.}
Mn=9550*P2n/(3e3/p*(1-Sn));{Номинальный момент, н*м}
Mmin=1*Mn; {Значение минимального момента, н*м}
Mmax=2.5*Mn; {Значение критического момента, н*м}
type StringSwitche=(ST11,ST12,ST13,ST14,ST15,ST16,ST17,DATA1,DATA2,
ST21,ST22,ST23,ST24,ST25,ENDT1,ENDT2);
var t,dt,U1a,U1b,M,A1,A2,K1,K2,L11,L21,L1,L2,L0,W1,EndT,SpeedScale,
I0a,I0b,I1a,I1b,I21a,I21b,KPD,CosF,I1,I21,W0,Psi1,Psi2,Psi0,s,I0,
I1n,X1t,R1t,X0t,R2t,X2t,R2pt,Smin:real;
RepeatNumber,CurrentNumber,CurrentRepeat,i,k,Ms,Uss,PsiAlpha,IsAlpha,
IsPsirAlpha,PsisRAngle,UssAbsoluteAngle,PsirRAngle,IsRAngle,IrsRAngle,
PsioRAngle,Fs:integer;
x,f,h,f1,f2,f3,f4:array[1..5] of real;
StringKPD,StringPsiAlpha,StringIsAlpha,StringIsPsirAlpha,StringCurrW,
StringAlphaRasch,StringIs,StringCosF, VectorString,VectorString0:string;
color:word;
Result:text;
{Пересчет паспортных данных в абсолютные единицы "Т"-образной схемы}
procedure ReCalculation;
var b:real;
begin
I1n:=P2n*1e3/(3*U1n*Cosn*KPDn); {Номинальный фазный ток}
X1t:=2*X1*X0/(X0+Sqrt(Sqr(X0)+4*X1*X0))*U1n/I1n;
R1t:=R1*X1t/X1; {Сопротивления статора, Ом}
X0t:=X0*U1n/I1n;{Сопротивление взаимоиндукции, Ом}
R2t:=R2*U1n/I1n;
X2t:=X2*U1n/I1n;{Сопротивления ротора, Ом}
R2pt:=R2p*U1n/I1n;
b:=R1/R2*Smax;
Smin:=Smax/Mmin*((1+b)*Mmax-b*Mmin+SqRt((1+b)*(Mmax-Mmin)*((1-b)*Mmin+(1+b)*Mmax)));
end;
{ Дифференциальные уравнения АД в двухфазной системе
координат (a,b), неподвижной относительно статора }
procedure Right_Part;
begin
if s>smin then A2:=(R2t+(R2pt-R2t)*(S-Smin)/(1-Smin))/L21
else A2:=R2t/L21;
U1a:=Uss*cos(W1*t);
U1b:=Uss*sin(W1*t);
f[1]:=U1a-A1*x[1]+A1*K2*x[3];
f[2]:=U1b-A1*x[2]+A1*K2*x[4];
f[3]:=A2*(K1*x[1]-x[3])-x[5]*x[4];
f[4]:=A2*(K1*x[2]-x[4])+x[5]*x[3];
M:=3/2*p*L0/(L1*L11)*(x[2]*x[3]-x[1]*x[4]);
f[5]:=p/J*(M-Ms);
S:=(W1-x[5])/W1;
end;
{ Модифицированный метод Рунге-Кутта 4-го порядка }
procedure Runge;
begin
for k:=1 to 5 do h[k]:=x[k];
Right_Part;
for k:=1 to 5 do
begin
f1[k]:=f[k];
x[k]:=h[k]+f1[k]*dt/2;
end;
Right_Part;
for k:=1 to 5 do
begin
f2[k]:=f[k];
x[k]:=h[k]+f2[k]*dt/2;
end;
Right_Part;
for k:=1 to 5 do
begin
f3[k]:=f[k];
x[k]:=h[k]+f3[k]*dt;
end;
Right_Part;
for k:=1 to 5 do
begin
f4[k]:=f[k];
x[k]:=h[k]+(f1[k]+2*f2[k]+2*f3[k]+f4[k])/6*dt;
end;
end;
{ Инициализация графики }
procedure Init_Graph;
var GraphDriver,GraphMode:integer;
i:integer;
color:word;
begin
GraphDriver:=0;
DetectGraph(GraphDriver,GraphMode);
if GraphMode>1 then GraphMode:=1;
InitGraph(GraphDriver,GraphMode,'e:tpbgi');
color:=GetMaxColor;
TextMode(1);
Writeln;
Writeln(' Graph Initialisate And ',GraphErrorMsg(GraphResult));
Writeln;
Writeln(' Use: GraphMode - ',GetModeName(GraphMode));
Writeln(' GraphDriver - ',GetDriverName);
Writeln;
Writeln(' The Number Of Using Colors :',GetMaxColor);
for i:=1 to 4 do Writeln;
Writeln(' Параметры АД:');
Writeln;
Writeln(' As =',A1:6,' Ar =',A2:6);
Writeln(' Ks =',K1:6,' Kr =',K2:6);
Writeln(' Ls`=',L11:6,' Lr`=',L21:6);
for i:=1 to 7 do Writeln;
Writeln(' Press Any Key To Continue');
pausa;
SetGraphMode(GraphMode);
end;
{ Процедура подготовки к цифровому моделированию
по паспортным данным двигателя }
procedure Prepeare;
var HelpVariable:integer;
begin
W1:=2*Pi*Fs;W0:=W1/p;
L0:=1.5*X0t/W1;L1:=X1t/W1;L2:=X2t/W1;
L1:=L1+L0;L2:=L2+L0;
K2:=L0/L2;K1:=L0/L1;
L11:=L1-sqr(L0)/L2;L21:=L2-sqr(L0)/L1;
A1:=R1t/L11;A2:=R2t/L21;
for HelpVariable:=1 to 5 do
begin
f[HelpVariable]:=0;
x[HelpVariable]:=0;
end;
end;
{ Процедура расчета угов векторов }
procedure AngleDefinition;
begin
UssAbsoluteAngle:=AbsoluteAngle(U1a,U1b);
PsisRAngle:=AbsoluteAngle(x[1],x[2])-UssAbsoluteAngle;
if PsisRAngle<0 then PsisRAngle:=360+PsisRAngle;
PsirRAngle:=AbsoluteAngle(x[3],x[4])-UssAbsoluteAngle;
if PsirRAngle<0 then PsirRAngle:=360+PsirRAngle;
IsRAngle:=AbsoluteAngle(I1a,I1b)-UssAbsoluteAngle;
if IsRAngle<0 then IsRAngle:=360+IsRAngle;
IrsRAngle:=AbsoluteAngle(I21a,I21b)-UssAbsoluteAngle;
if IrsRAngle<0 then IrsRAngle:=360+IrsRAngle;
PsioRAngle:=AbsoluteAngle(I0a,I0b)-UssAbsoluteAngle;
if PsioRAngle<0 then PsioRAngle:=360+PsioRAngle;
end;
procedure OutStringSum;
begin
VectorString:=VectorString+VectorString0+'¦';
end;
{ Функция, выдающая строку таблицы out - данных }
function GetVectorString(Number:StringSwitche):string;
begin
Case Number of
ST11 :GetVectorString:='+----------------------------------------------------------------------------+';
ST12 :GetVectorString:='¦ ¦ ¦ ¦ ¦ ¦ ¦ Uss ¦ Psis ¦';
ST13 :GetVectorString:='¦ ¦ ¦ ¦ ¦ ¦ +--------------------+-------------¦';
ST14 :GetVectorString:='¦ Fs ¦ Ms ¦ Wv ¦ S ¦ Effi-¦cos(F)¦ ¦ Angle ¦ ¦ ¦';
ST15 :GetVectorString:='¦ ¦ ¦ ¦ ¦ciency¦ ¦Module+-------------¦Module¦RAngle¦';
ST16 :GetVectorString:='¦ ¦ ¦ ¦ ¦ ¦ ¦ ¦absol.¦relat.¦ ¦ ¦';
ST17 :GetVectorString:='+------+------+------+------+------+------+------+------+------+------+------¦';
DATA1:begin
VectorString:='¦';Str(Fs:6,VectorString0);OutStringSum;
Str(Ms:6,VectorString0);OutStringSum;
Str(x[5]/p:6:2,VectorString0);OutStringSum;
Str(s:6:3,VectorString0);OutStringSum;
Str(KPD:6:3,VectorString0);OutStringSum;
Str(CosF:6:3,VectorString0);OutStringSum;
Str(Uss:6,VectorString0);OutStringSum;
Str(UssAbsoluteAngle:6,VectorString0);OutStringSum;
VectorString0:=' 0 ';OutStringSum;
Psi1:=sqrt(sqr(x[1])+sqr(x[2]));
Str(Psi1:6:4,VectorString0);OutStringSum; Str(PsisRAngle:6,VectorString0);OutStringSum;
GetVectorString:=VectorString;
end;
ENDT1:GetVectorString:='+----------------------------------------------------------------------------+';
ST21 :GetVectorString:='+----------------------------------------------------------------------------+';
ST22 :GetVectorString:='¦ Psir ¦ Is ¦ Irs ¦ Psio ¦ Power ¦ ¦';
ST23 :GetVectorString:='+-------------+-------------+-------------+-------------+-------------¦ M ¦';
ST24 :GetVectorString:='¦Module¦RAngle¦Module¦RAngle¦Module¦RAngle¦Module¦RAngle¦ Full ¦Utilit¦ ¦';
ST25 :GetVectorString:='+------+------+------+------+------+------+------+------+------+------+------¦';
DATA2:begin
Psi2:=sqrt(sqr(x[3])+sqr(x[4]));Psi0:=I0*L0;
Str(Psi2:6:4,VectorString0);VectorString:='¦';OutStringSum;
Str(PsirRAngle:6,VectorString0);OutStringSum;
Str(I1:6:2,VectorString0);OutStringSum;
Str(IsRAngle:6,VectorString0);OutStringSum;
Str(I21:6:2,VectorString0);OutStringSum;
Str(IrsRAngle:6,VectorString0);OutStringSum;
Str(Psi0:6:4,VectorString0);OutStringSum;
Str(PsioRAngle:6,VectorString0);OutStringSum;
Str(0.003*Uss/sqrt(2)*I1:6:2,VectorString0);OutStringSum;
Str(0.003*Uss/sqrt(2)*I1*CosF:6:2,VectorString0);OutStringSum;
Str(M:6:2,VectorString0);OutStringSum;
GetVectorString:=VectorString;
end;
ENDT2:GetVectorString:='+----------------------------------------------------------------------------+'
end
end;
{ Процедура, рисующая векторную диаграмму }
procedure DrawVectorDiagram;
var CenterX,CenterY,Max,Kx:real;
Xk,Yk:word;
begin
GetAspectRatio(Xk,Yk);Kx:=Yk/Xk;
CenterY:=GetMaxY/2;Max:=(GetMaxY-150)/2;CenterX:=2/3*GetMaxX-10;
PutVector(CenterX,CenterY,Max,90,GetMaxColor,'Uss');
PutVector(CenterX,CenterY,Max,90+IsRAngle,GetMaxColor*0.9,'Is');
PutVector(CenterX,CenterY,Max*I21/I1,90+IrsRAngle,GetMaxColor*0.88,'Irs');
PutVector(CenterX,CenterY,Max,90+PsisRAngle,GetMaxColor*0.8,'Psis');
PutVector(CenterX,CenterY,Max*Psi2/Psi1,90+PsirRAngle,GetMaxColor*0.75,'Psir');
PutVector(CenterX,CenterY,Max*Psi0/Psi1,90+PsioRAngle,GetMaxColor*0.65,'Psio');
end;
procedure SolveDiagram;Forward;
{ Процедура выхода из программы }
procedure quit;
begin
Write(Result,GetVectorString(ENDT1));Writeln(Result,GetVectorString(ENDT2));
Close(Result);GraphDefaults;CloseGraph;Halt;
end;
{ Процедура анализа скэн - кода }
procedure PressKeyAnalysis;
var p:char;
begin
p:=chr(0);
if KeyPressed=True then
Case ReadKey of
'V','v':SolveDiagram;
'M','m':begin
Ms:=NumberInput('Момент');
SolveDiagram;
end;
'U','u':begin
Uss:=round(NumberInput('Напряжение')*sqrt(2));
SolveDiagram;
end;
'W','w':begin
Write(Result,GetVectorString(DATA1));
Writeln(Result,GetVectorString(DATA2));
SolveDiagram;
end;
'P','p':begin
SetActivePage(1);SetVisualPage(0);
SetViewPort(0,100,300,204,True);ClearViewPort;
SetViewPort(0,0,GetMaxX,GetMaxY,True);
TextOut(80,148,0.9,'Печать:');
TextOut(0,164,0.75,'1 - печать графика скорости');
TextOut(0,180,0.87,'2 - печать векторной диаграммы');
SetVisualPage(1);
Repeat p:=ReadKey;
Until (p='1') or (p='2');
Case p of
'1':begin
SetActivePage(0);SetVisualPage(0);
CopyToPRN;
end;
'2':begin
SetActivePage(1);SetVisualPage(1);
CopyToPRN;
end
end;
SolveDiagram;
end;
'Q','q':quit
else
SetColor(GetMaxColor);
SetVisualPage(0);
end
end;
{ Процедура расчета векторной диаграммы }
procedure SolveDiagram;
begin
SetVisualPage(0);SetActivePage(1);
SetViewPort(0,0,GetMaxX,GetMaxY,True);SetBkColor(Black);ClearViewPort;SetColor(GetMaxColor);
AngleDefinition;
{формирование} OutTextXY(0,0,GetVectorString(ST11));OutTextXY(0,8,GetVectorString(ST12));
{ заголовка } OutTextXY(0,16,GetVectorString(ST13));OutTextXY(0,24,GetVectorString(ST14));
{ первой } OutTextXY(0,32,GetVectorString(ST15));OutTextXY(0,40,GetVectorString(ST16));
{ таблицы } OutTextXY(0,48,GetVectorString(ST17));
{вывод данных} OutTextXY(0,56,GetVectorString(DATA1));
{конец табл.1} OutTextXY(0,64,GetVectorString(ENDT1));
{конец табл.2} OutTextXY(0,GetMaxY-8,GetVectorString(ENDT2));
{вывод данных} OutTextXY(0,GetMaxY-16,GetVectorString(DATA2));
{формирование} OutTextXY(0,GetMaxY-24,GetVectorString(ST25));OutTextXY(0,GetMaxY-32,GetVectorString(ST24));
{ заголовка } OutTextXY(0,GetMaxY-40,GetVectorString(ST23));OutTextXY(0,GetMaxY-48,GetVectorString(ST22));
{ таблицы2 } OutTextXY(0,GetMaxY-56,GetVectorString(ST21));
DrawVectorDiagram;
TextOut(56,100,0.9,'КЛАВИАТУРА:');TextOut(0,116,0.75,'V - векторная диаграмма');
TextOut(0,132,0.87,'W - запись результатов в файл');TextOut(0,148,0.65,'M - изменить момент на валу');
TextOut(0,164,0.6,'U - изменить напряжение');TextOut(0,180,0.4,'P - печать результатов моделирования');
TextOut(0,196,0.8,'Q - выход в систему');
SetVisualPage(1);SetActivePage(0);
end;
{Процедура моделирования пуска асинхронного двигателя}
procedure Model;
begin
RepeatNumber:=round(EndT/(dt*640));
SpeedScale:=GetMaxY/(3*W0);
for CurrentNumber:=0 to 640 do
begin
for CurrentRepeat:=1 to RepeatNumber do
begin
Runge;
I1a:=x[1]/L11-K2/L11*x[3];
I1b:=x[2]/L11-K2/L11*x[4];
I1:=sqrt(sqr(I1a)+sqr(I1b));
I21a:=x[3]/L21-K1/L21*x[1];
I21b:=x[4]/L21-K1/L21*x[2];
I21:=Sqrt(sqr(I21a)+sqr(I21b));
I0a:=I1a+I21a;I0b:=I1b+I21b;
I0:=sqrt(sqr(I0a)+sqr(I0b));
t:=t+dt;
PutPixel(CurrentNumber,round(GetMaxY/2-SpeedScale*x[5]/p),color);
end;
PutPixel(CurrentNumber,round(GetMaxY/2-SpeedScale*x[5]/p),color);
SetActivePage(0);
PsiAlpha:=AbsoluteAngle(I0a,I0b)-AbsoluteAngle(x[3],x[4]);
IsPsirAlpha:=AbsoluteAngle(I1a,I1b)-AbsoluteAngle(x[3],x[4]);
IsAlpha:=AbsoluteAngle(U1a,U1b)-AbsoluteAngle(I1a,I1b);
CosF:=cos(IsAlpha*Pi/180);
if (Uss*I1)<>0 then KPD:=abs(M*Fs*4*Pi/(3*p*Uss*I1));
Str(Uss:5,StringPsiAlpha);Str(IsAlpha,StringIsAlpha);
Str(KPD:5:3,StringKPD);Str(IsPsirAlpha,StringIsPsirAlpha);
Str(s:6:4,StringAlphaRasch);Str(x[5]/p:5:1,StringCurrW);
Str(I1:6:2,StringIs);Str(CosF:4:2,StringCosF);
SetViewPort(184,20,240,30,False);ClearViewPort;SetViewPort(304,20,368,30,False);ClearViewPort;
SetViewPort(400,20,472,30,False);ClearViewPort;SetViewPort(576,20,638,30,False);ClearViewPort;
SetViewPort(184,40,248,50,False);ClearViewPort;SetViewPort(296,40,368,50,False);ClearViewPort;
SetViewPort(400,40,472,50,False);ClearViewPort;SetViewPort(576,40,638,50,False);ClearViewPort;
SetViewPort(0,0,GetMaxX,GetMaxY,True);
OutTextXY(192,20,StringPsiAlpha);OutTextXY(312,20,StringIsAlpha);
OutTextXY(408,20,StringKPD);OutTextXY(584,20,StringIsPsirAlpha);
OutTextXY(192,40,StringAlphaRasch);OutTextXY(312,40,StringCurrW);
OutTextXY(408,40,StringIs);OutTextXY(584,40,StringCosF);
PressKeyAnalysis;
end;
end;
{ Процедура формирования заголовка файла }
procedure FileHead;
begin
Assign(Result,'lw.res');
Rewrite(Result);
Writeln(Result,GetVectorString(ST11));Writeln(Result,GetVectorString(ST12));
Write(Result,GetVectorString(ST13));Writeln(Result,GetVectorString(ST21));
Write(Result,GetVectorString(ST14));Writeln(Result,GetVectorString(ST22));
Write(Result,GetVectorString(ST15));Writeln(Result,GetVectorString(ST23));
Write(Result,GetVectorString(ST16));Writeln(Result,GetVectorString(ST24));
Write(Result,GetVectorString(ST17));Writeln(Result,GetVectorString(ST25));
end;
{ Основная программа }
begin
ReCalculation;
ClrScr;Writeln;
TextColor(10);WriteLn(' Программа расчета и вывода векторной диаграммы А.Д.');
TextColor(12);Writeln(' Для IBM PC/XT/AT/PS-2 с ОЗУ экрана 256/512 Кб');
for i:=0 to 4 do Writeln;TextColor(15);
Write('Введите время окончания работы двигателя: ');Readln(EndT);
Write('Введите частоту питающей сети (Гц): ');Readln(Fs);
t:=0;dt:=1e-4;Ms:=0;Uss:=round(310*Fs/50);
FileHead;Prepeare;Init_Graph;TextMode(2);
SetActivePage(0);SetVisualPage(0);
Scale(1.5*W0,-1.5*W0,EndT,'t,c','W,рад/с');
SetColor(round(GetMaxColor*0.7));
OutTextXY(66,8,'Программа расчета векторной диаграммы и некоторых параметров А.Д.');
SetColor(round(GetMaxColor*0.9));
OutTextXY(112,20,'PsiAlpha:');OutTextXY(240,20,'IsAlpha:');
OutTextXY(368,20,'KPD:');OutTextXY(496,20,'IsPrAlpha:');
OutTextXY(96,40,'RelSkRasch:');OutTextXY(256,40,'CurrW:');
OutTextXY(376,40,'Is:');OutTextXY(536,40,'CosF:');
SetViewPort(0,0,GetMaxX,GetMaxY,True);
color:=GetMaxColor;SetColor(color);
Model;
Quit;
end.
{ ИСХОДНЫЙ ТЕКСТ МОДУЛЯ СЕРВИСНЫХ ПРОЦЕДУР И ФУНКЦИЙ }
Unit Im_tpu;
Interface
uses graph,dos,crt,printer;
type string4=string[4];
procedure pausa;
procedure Scale(Ymax,Ymin,Tmax:real;XText,YText:string);
function AbsoluteAngle(AComponent,BComponent:real):integer;
procedure PutVector(Xb,Yb,MVector,AVector,Col:real;Name:string4);
function NumberInput(What:string):integer;
procedure TextOut(X,Y:integer;Col:real;TextString:string);
procedure CopyToPRN;
function Sgn(v:real):integer;
function DefTime:string;
procedure TimeOut;
procedure PrintPausa;
Implementation
{ Пауза до первой нажатой клавиши }
procedure pausa;
begin
Repeat Until ReadKey<>#0
end;
{ Вывод на экран системы координат }
procedure Scale(Ymax,Ymin,Tmax:real;XText,YText:string);
var Ybeg,Ystep,Tstep,t1:real;
ScaleGrad:string;
Col:word;
SDrawX,SDrawY,HelpVar,GDriver,GMode:integer;
begin
DetectGraph(GDriver,GMode);GMode:=1;
InitGraph(Gdriver,GMode,'');
SetBkColor(0);SetColor(GetMaxColor);
Col:=GetMaxColor;PutPixel(0,0,Col);
LineTo(GetMaxX,0);LineTo(GetMaxX,GetMaxY);
LineTo(0,GetMaxY);LineTo(0,0);
for SDrawX:=1 to 19 do
for SdrawY:=1 to 19 do
PutPixel(SdrawX*GetMaxX div 20,SdrawY*GetMaxY div 20,col);
SetTextStyle(0,0,1);
if Ymin<0 then Ystep:=(Ymax-Ymin)/10
else
Ystep:=Ymax/10;
for HelpVar:=0 to 10 do
begin
Str(Ymax:9,ScaleGrad);
OutTextXY(0,HelpVar*GetMaxY div 10,ScaleGrad);
Ymax:=Ymax-Ystep;
end;
Tstep:=Tmax/5;t1:=0;
for HelpVar:=0 to 4 do
begin
Str(t1:9,ScaleGrad);
OutTextXY(HelpVar*GetMaxX div 5,GetMaxY-10,ScaleGrad);
t1:=t1+Tstep;
end;
SetColor(round(GetMaxColor/1.25));
OutTextXY(GetMaxX-48,GetMaxY-11,XText);OutTextXY(8,20,YText);
SetColor(GetMaxColor);
end;
{ Функция геометрического анализа и расчета абсолютного угла вектора }
function AbsoluteAngle(AComponent,BComponent:real):integer;
var IntAngle:integer;
begin
if AComponent<>0 then IntAngle:=round(180/Pi*ArcTan(BComponent/AComponent));
if AComponent=0 then
begin
if BComponent>0 then IntAngle:=90
else IntAngle:=-90;
end
else
if BComponent=0 then
begin
if AComponent>0 then IntAngle:=0
else IntAngle:=180;
end
else
if ((AComponent>0) and (BComponent>0)) or (AComponent>0) and (BComponent<0) then
{первый и второй квадранты}
IntAngle:=IntAngle
else
IntAngle:=180+IntAngle;{второй и третий квадранты};
if IntAngle<0 then IntAngle:=360+IntAngle;
AbsoluteAngle:=IntAngle;
end;
{ Процедура вывода вектора по заданным координатам }
procedure PutVector(Xb,Yb,MVector,AVector,Col:real;Name:string4);
const LengthPoint=8;
var Xbh,Ybh,Xeh,Yeh,Xp,Yp,AVAngle:integer;
Xk,Yk,Colh:word;
Kx:real;
begin
GetAspectRatio(Xk,Yk);Kx:=Yk/Xk;
Xbh:=round(Xb);Ybh:=Round(Yb);
Xeh:=Round(Xb+Kx*MVector*cos(Pi/180*AVector));
Yeh:=round(Yb-MVector*sin(Pi/180*AVector));
Colh:=round(Col);SetColor(Colh);
Line(Xbh,Ybh,Xeh,Yeh);
AVAngle:=AbsoluteAngle((Xeh-Xbh),(Ybh-Yeh));
Xp:=round(LengthPoint*Kx*Cos(Pi/180*(AVAngle+10)));
Yp:=round(LengthPoint*Sin(Pi/180*(AVAngle+10)));
Xp:=Xeh-Xp;Yp:=Yeh+Yp;
Line(Xeh,Yeh,Xp,Yp);
Xp:=round(LengthPoint*Kx*Cos(Pi/180*(AVAngle-10)));
Yp:=round(LengthPoint*Sin(Pi/180*(AVAngle-10)));
Xp:=Xeh-Xp;Yp:=Yeh+Yp;
Line(Xeh,Yeh,Xp,Yp);
OutTextXY(Xeh+4,Yeh,Name);
end;
{ Функция ввода числа с клавиатуры в графическом режиме }
function NumberInput(What:string):integer;
var InputChar:char;
number:integer;
begin
SetActivePage(1);SetVisualPage(1);
SetColor(round(GetMaxColor*0.8));What:=What+' :';
OutTextXY(0,GetMaxY-80,What);Number:=0;MoveTo(120,GetMaxY-80);
Repeat
InputChar:=ReadKey;
if (InputChar>'/') and (InputChar<':') then
begin
Number:=Number*10-48+ord(InputChar);
OutText(InputChar);
end;
Until ord(InputChar)=13;
SetColor(GetMaxColor);SetBkColor(0);
SetViewPort(0,GetMaxY-80,300,GetMaxY-72,True);
ClearViewPort;NumberInput:=Number;
SetViewPort(0,0,GetMaxX,GetMaxY,True);
SetActivePage(0);
end;
{ Процедура вывода на экран в заданную позицию (X,Y)
заданного текста (TextString) заданным цветом (Col) }
procedure TextOut(X,Y:integer;Col:real;TextString:string);
begin
SetColor(round(Col*GetMaxColor));
OutTextXY(X,Y,TextString);
end;
{ Процедура графической копии экрана }
procedure CopyToPRN;
var x1,x2,y1,y2:integer;
Bk1,Bk2,Mode:Byte;
Inverse:Boolean;
procedure SetPoints;
begin
x1:=0;x2:=GetMaxX;
y1:=0;y2:=GetMaxY;
Bk1:=0;Bk2:=0;
Inverse:=False;
Mode:=1;
end;
{ X1,Y1,X2,Y2 - the size of output screen }
{ Bk1,Bk2 - the colours of the both backgrounds }
{ Inverse - normal (false) or invert (true) colour of the printing copy }
{ Mode: 1 - double density 120 points/inch }
{ 2 - high speed 120 points/inch }
{ 3 - high density 240 points/inch }
{ 0, 4, 5 - 80 points/inch }
{ 6 - 90 points/inch }
{ For nonFX EPSON - printers Mode = 1 }
var ScanLine:integer;{ current printing string }
n1,n2 :Byte; { special data for printer }
{ The construction of the byte for the printing graphics }
function ConstructByte(x,y:integer):byte;
const bits:array[0..7] of byte=(128,64,32,16,8,4,2,1);
var p :word; { the colour of the pixel }
CByte,Bit:byte; { byte and the bites number }
YY :integer; { the state of the current pixel }
begin
CByte:=0;
for Bit:=0 to 7 do
begin
YY:=Y+Bit;
P:=GetPixel(X,YY);
if (YY<=Y2) and (P<>bk1) and (P<>bk2) then Inc(CByte,Bits[Bit]);
end;
ConstructByte:=CByte;
end;
{ The graphics string output }
procedure DoLine;
var XPixel :integer; { the current X - position }
PrintByte:byte; { the byte, which code 8 pixels }
begin
if Mode=1 then Write(Lst,#27'L')
else Write(Lst,#27'*',chr(mode));
Write(Lst,chr(n1),chr(n2));
for XPixel:=X1 to X2 do
begin
PrintByte:=ConstructByte(XPixel,ScanLine);
if Inverse then PrintByte:=not PrintByte;
Write(Lst,chr(PrintByte));
end;
Write(Lst,#10);
end;
label quit;
begin
SetPoints;
mode:=mode mod 7;
if mode in [0,5] then mode:=4;
Write(Lst,#27'3'#24);
n1:=Lo(succ(X2-X1));n2:=Hi(succ(X2-X1));
ScanLine:=Y1;
while ScanLine<Y2 do
begin
if KeyPressed and (ReadKey=#27) then Goto Quit;
DoLine;
Inc(ScanLine,8);
end;
quit:Write(Lst,#27#2);
end;
{ Определение знака выражения }
function Sgn(v:real):integer;
begin
if v<0 then Sgn:=-1
else
Sgn:=1;
if v=0 then Sgn:=0;
end;
{ Функция расчета времени счета }
function DefTime:string;
var cw,mw,sw,sdw:word;
cs,ms,ss,sds:string;
begin
GetTime(cw,mw,sw,sdw);
str(cw,cs);str(mw,ms);str(sw,ss);str(sdw,sds);
DefTime:=cs+':'+ms+':'+ss+'.'+sds;
end;
{ Процедура вывода на экран времени счета }
procedure TimeOut;
var ST:string;
begin
ST:=' Время счета : '+DefTime;
GoToXY(10,10);
Write(ST);
end;
procedure PrintPausa;
var c:char;
begin
Repeat c:=ReadKey
Until ((c='P') or (c='p') or (c<>''));
Case c of
'P','p':CopyToPRN
else
end
end;
end.
Протокол работы программы IM-MAIN.EXE
Параметры АД:
Время моделирования: 1 с
Частота питающей сети: 50 Гц
As = 4.5E+0001 Ar = 2.1E+0001
Ks = 9.9E-0001 Kr = 9.8E-0001
Ls`= 1.3E-0003 Lr`= 1.3E-0003
Рис.1(а)
Рис. 1(б)
Рис. 1(в)
Рис.2(а)
Рис. 2(б)
Рис. 3(а)
Рис. 3(
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке. ОСНОВНАЯ ЧАСТЬ 1 Регулирование скорости вращения асинхронных двигателей Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а ...

... двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода). 1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной ...
... электроприводов имеет свои недостатки и ограничения. . Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором ...
0 комментариев