Техническое описание системы
Анализ существующих средств автоматизации
Требования к системе
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению компонентов системы
Требования к информационному обеспечению
Разработка структурной схемы
Исходные данные
Решение прямой задачи кинематики
Основные принципы конструирования печатных плат
Технология изготовления платы
Навигация
Требования к информационному обеспечению
Управление асинхронным двигателем
102925
знаков
0
таблиц
29
изображений
2.5.2 Требования к информационному обеспечению
База данных АСУ должна быть распределена в соответствии с принципами декомпозиции комплекса технических средств и адекватна иерархической структуре АСУ с распределенными функциями обработки информации.
Информационный обмен между компонентами АСУ должен обеспечивать целостность распределенной базы данных системы.
Информационный обмен между системами АСУТП в зависимости от уровня иерархии и распределения их по техническим средствам должен осуществляться путем:
передачи унифицированных сигналов ;
передачи межсистемных сообщений и запросов ;
использования общих информационных баз.
Для обеспечения сохранности информации при сбоях или авариях в системе электропитания технических средств АСУТП должны быть предусмотрены следующие меры :
дублирование входного потока сигналов и сообщений;
формирование дублирующих баз данных на магнитных носителях;
применение энергонезависимых оперативных запоминающих устройств;
квитирование межсистемных сообщений.
Должен быть предусмотрен контроль входной информации каждой системы на достоверность, в т. ч. контроль достоверности информации, вводимой оператором вручную.
Должна быть предусмотрена возможность восстановления базы данных АСУ с использованием дублирующей базы данных и архивной информации.
2.5.3 Требования к лингвистическому обеспечению
Требования к применению языков программирования, языков взаимодействия пользователей и технических средств системы, а также требования к кодированию и декодированию данных, средствам манипулирования данными и способам организации диалога определяются применяемым для реализации АСУТП комплексом технических средств.
Человеко-машинное взаимодействие при вводе-выводе информации должно осуществляться в интерактивном режиме с помощью клавиатуры и дисплея для подсистем верхнего и среднего уровней АСУ. Для подсистем нижнего уровня АСУ ввод исходных данных может осуществляться с помощью задатчиков и сервисных устройств комплекса технических средств.
Должны быть обеспечены единство и однозначность кодирования информации различных уровней системы.
В целях защиты информации от несанкционированного доступа должна быть предусмотрена система паролей с различными уровнями доступа для различных категорий пользователей с разной мерой ответственности.
2.5.4 Требования к программному обеспечению
Программное обеспечение АСУТП должно быть достаточным для реализации всех функций системы.
Требования к независимости программных средств от используемых средств вычислительной техники и операционной системы не предъявляются.
Базовое и тестовое программное обеспечение должны поставляться в составе комплекса технических средств.
Прикладное программное обеспечение подсистем нижнего уровня может быть создано путем конфигурирования стандартных программных модулей с использованием инструментального комплекса техническим средств. При необходимости должны быть разработаны дополнительные программные модули и средства.
Требования к необходимости согласования вновь разрабатываемых программных средств с фондом алгоритмов и программ не предъявляются.
2.5.5 Требования к техническому обеспечению
В качестве средств вычислительной техники должны быть применены персональные ЭВМ (ПЭВМ) на верхнем уровне АСУ и микропроцессорный комплекс технических средств на нижнем уровне системы. Техническое обеспечение АСУТП должно быть построено по иерархическому принципу и обеспечивать выполнение функций, описанных в техническом задании данного дипломного проекта.
Комплекс технических средств АСУТП должен обеспечивать бесперебойное функционирование системы.
Для получения первичной входной информации должны быть использованы датчики, измерительные и нормирующие преобразователи с унифицированными характеристиками.
Комплекс технических средств АСУТП должен отвечать следующим критериям :
обеспечение минимального времени на обслуживание ;
наглядность и простота пользования средствами отображения, сигнализации и дистанционного управления ;
высокая автоматизация процессов запуска, останова и сервисного обслуживания ;
удобство пользования справочными, архивными и сервисными данными.
3. СПЕЦИАЛЬНАЯ ЧАСТЬ
3.1 Выбор технических средств
Исходя из формулировки задачи определим технические средства необходимые для реализации устройства с заданными характеристиками и свойствами.
Для контроля скорости вала двигателя будем использовать тахогенератор сопряженный с валом рабочего двигателя, сигнал от которого заведем на аналогово-цифровой преобразователь находящийся непосредственно в разрабатываемой системе. Для преобразования непрерывного сигнала в цифровую форму представления выберем микросхему 1113ПВ1.
Сигналы от АЦП будем передавать на однокристальный микроконтроллер КР1816ВЕ51 выбранный по причине его аналогичности контроллеру Intel87C51FX, соответствия команд этих контроллеров и соответствия по уровням сигналов с ЭВМ выпускаемыми Intel, а также необходимости оперирования с данными представленными в параллельном формате, а также передачи обработанной информации в последовательном формате. Для ведения статистики работы системы потребуется ЭВМ типа IBM AT286 или более поздние модели.
Для получения информации о процессах, происходящих в системе, потребуются датчики. Для коммутации датчиков с модулем микроконтроллера используем принцип опроса и передачи информации о состоянии дискретных датчиков. Сопряжение будет осуществляться по линии связи посредством кабеля ТРШ.
Для гальванической развязки цепей линии связи и цепей микроконтроллера будем использовать оптроны, которые необходимы для преобразования сигналов представленных в линии связи импульсами тока в импульсы напряжения ТТЛ-уровня.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке. ОСНОВНАЯ ЧАСТЬ 1 Регулирование скорости вращения асинхронных двигателей Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а ...

... двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода). 1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной ...
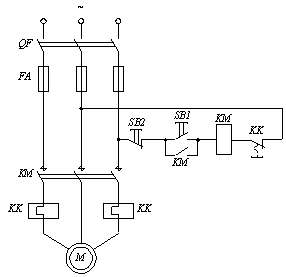
... электроприводов имеет свои недостатки и ограничения. . Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором ...
0 комментариев