Техническое описание системы
Анализ существующих средств автоматизации
Требования к системе
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению компонентов системы
Требования к информационному обеспечению
Разработка структурной схемы
Исходные данные
Решение прямой задачи кинематики
Основные принципы конструирования печатных плат
Технология изготовления платы
Навигация
Исходные данные
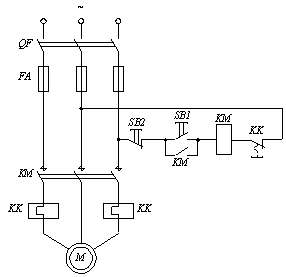
Управление асинхронным двигателем
102925
знаков
0
таблиц
29
изображений
3.4.2 Исходные данные
Положение выходного звена:
X=-250 ;Y=140 ;Z=480
Кинематическая схема манипулятора:
10P11
3.4.3 Основные понятия и определения
Манипулятором называется техническое устройство, предназначенное для воспроизведения некоторых рабочих функций рук человека. Манипулятором называют также исполнительный механизм промышленного робота, оснащенный приводами и рабочим органом, с помощью которого осуществляется выполнение рабочих функций. Способность воспроизводить движения, подобные движениям рук человека, достигается приданием манипулятору нескольких степеней свободы, по которым осуществляется управляемое движение с целью получения заданного движения рабочего органа - схвата.
Числом степеней свободы механической системы называется число возможных перемещений системы.
Твердые тела, входящие в механическую систему манипулятора, называются звеньями. В механике различают входные и выходные звенья. Входным называется звено, которому сообщается движение, преобразуемое механизмом. Выходным называется звено, совершающее рабочее движение.
Таким образом, в манипуляторе число входных звеньев равно числу приводов, а выходное звено, как правило, одно - схват, или рабочий орган.
Подвижное соединение двух соприкасающихся звеньев называется кинематической парой.
3.4.4 Метод матриц в кинематике манипуляторов
Метод матриц можно применять к расчету любого манипулятора с поступательными и вращательными кинематическими парами. Универсальность метода покупается ценой некоторой избыточности вычислений. Этот метод развивался параллельно с развитием вычислительной техники, и он больше приспособлен к расчетам на ЭВМ, нежели к расчетам вручную. Его использование требует свободного обращения с матричным аппаратом.
ACE="Times New Roman">
3.4.5 Выбор систем координат
Осью вращательной пары (i, i+1), составленной из звеньев i и i+1, является ось цилиндрического шарнира, жестко связанная со звеном i, вокруг которой вращается звено i+1. Для поступательной пары (i, i+1) осью является любая прямая, параллельная вектору скорости поступательного движения звена i+1 относительно звена i.
Пронумеруем все звенья манипулятора от стойки (звено 0) до схвата (звена n) и свяжем с каждым из них свою систему декартовых координат, выбранную следующим специальным образом: ось Zi идет по оси кинематической пары (i, i+1); начало координат системы i, жестко связанной со звеном i, лежит на общем перпендикуляре к осям Zi-1 и Zi, либо в точке их пересечения, если таковая имеется, либо в любой точке оси кинематической пары, если ось Zi совпадает с осью Zi-1 или параллельна ей; ось Xi идет по общему перпендикуляру, проведенному к осям Zi-1 и Zi, и направлена от точки пересечения этого перпендикуляра с осью Zi-1 к точке его пересечения с осью Zi (или в любую сторону по нормали к плоскости, содержащей оси Zi-1 и Zi, если они пересекаются, или произвольным образом, если Zi-1 и Zi идут по одной прямой); ось Yi выбирается по правилу правой тройки векторов.
Начало координат системы 0, т.е. системы, жестко связанной со стойкой, может лежать в любой точке оси пары (0,1); ось Xо направляется произвольным образом.
Выбор системы n тоже выпадает из общего правила, так как звено n+1 отсутствует. Поэтому предлагается вообразить любого типа пару (n, n+1) и после этого выбрать систему по общему правилу. Начало выбранной таким образом системы называется центром схвата.
3.4.6 Расширенная матрица перехода для кинематической
пары. Определение положения и ориентации звеньев
Специальный выбор систем координат звеньев манипулятора позволяет с помощью лишь четырех параметров описать переход из одной системы в другую. Систему i-1 можно преобразовать в систему i с помощью поворота, двух сдвигов (переносов) и еще одного поворота, выполняемых в следующем порядке:
1) поворот системы i-1 вокруг оси Zi-1 на угол Q i до тех пор, пока ось Xi-1 не станет параллельной оси Xi;
2) сдвиг повернутой системы вдоль оси Zi на величину Si до тех пор, пока оси Xi-1 и Xi не окажутся на одной прямой;
3) сдвиг вдоль оси Xi на величину ai до тех пор, пока не совпадут начала координат;
4) поворот вокруг оси Xi на угол a i до совмещения оси Zi-1 c осью Zi.
Расширенная матрица имеет следующий вид:
В расширенную матрицу Di входят четыре параметра: Q i, a i, Si, ai. Для любой кинематической пары три из них должны быть константами и только один - переменной величиной. Для вращательной пары переменной величиной является угол Q i, а для поступательной пары - перемещение Si.
Для определения положения и ориентации звена i в системе 0, следует найти произведение расширенных матриц А1, А2,... , Аi:
Ti = D1·D2· ... ·Di
Столбцы матрицы Ti имеют следующее геометрическое толкование: первые три элемента первого, второго и третьего столбцов представляют собой направляющие косинусы соответственно осей Xi, Yi, Zi в системе 0; три элемента четвертого столбца - это координаты xi, yi, zi центра системы i в системе 0.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке. ОСНОВНАЯ ЧАСТЬ 1 Регулирование скорости вращения асинхронных двигателей Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а ...

... двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода). 1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной ...
... электроприводов имеет свои недостатки и ограничения. . Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором ...
0 комментариев