Техническое описание системы
Анализ существующих средств автоматизации
Требования к системе
Требования к эксплуатации, техническому обслуживанию, ремонту и хранению компонентов системы
Требования к информационному обеспечению
Разработка структурной схемы
Исходные данные
Решение прямой задачи кинематики
Основные принципы конструирования печатных плат
Технология изготовления платы
Навигация
Решение прямой задачи кинематики
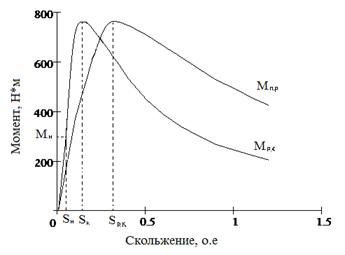
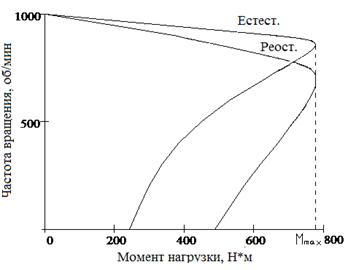
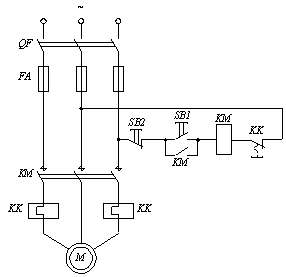
Управление асинхронным двигателем
102925
знаков
0
таблиц
29
изображений
3.4.7 Решение прямой задачи кинематики
Специальные системы координат выбираем в соответствии с указаниями (см. выше). Ось Z0 идет по оси поступательной пары (0,1), вдоль которой тело 1 поступательно перемещается относительно тела 0; ось Z1 идет по оси вращательной пары (1,2), т.е. по оси вращения тела 2; ось Z2 идет по оси вращательной пары (2,3); ось Z3 по оси поступательной пары (3,4); ось Z4 параллельна оси Z3 и проходит через центр схвата. Направление осей X, Y и положения начал координат показаны на конструктивной схеме (см. ниже).
Cоставим матрицы для всех звеньев. Для этого пронумеруем и определим параметры кинематических пар, а результаты занесем в таблицу, приведенную ниже.
| Кинема-тическая пара | Тип пары | № звена i | ||||
| Q | a | S | A | |||
| 0,1 | поступа-тельная | 1 | 0 | 0 | S1 | 0 |
| 1,2 | враща-тельная | 2 | -Q 2 | p /2 | S2 | 0 |
| 2,3 | потупа-тельная | 3 | 0 | 0 | S3 | 0 |
| 3,4 | поступа-тельная | 4 | 0 | 0 | S4 | 0 |
Для решения прямой задачи кинематики необходимо составить матрицы. В нашем случае матрицы A1 ,A3 и A4 - матрицы сдвига, а A2 - матрица вращения. Эти матрицы получаются из результирующей матрицы перехода, связывающей системы (i-1) и i.
Рассчитаем результирующие матрицы перехода для заданной кинематической системы манипулятора.
 ;
;  ;
;  ;
;
Задача решается при помощи формулы:
![]()
Решение прямой задачи кинематики сводится к тому, что имея значения обобщенных координат определяются элементы матрицы T, которая однозначно устанавливает положение и ориентацию схвата в системе координат стойки.

Координаты центра схвата в системе, связанной со стойкой манипулятора:
3.4.8 Решение обратной задачи кинематики
Обратную задачу кинематики можно сформулировать так : задана кинематическая схема манипулятора и известны положение и ориентация схвата в системе координат стойки. Требуется определить значения обобщенных координат, которые обеспечат заданное положение схвата.
Задать положение схвата, как и любого твердого тела, можно с помощью шести величин. Обычно три из них - это координаты центра схвата, еще две - это направляющие косинусы одной из координатных осей схвата и последняя - это один из направляющих косинусов другой координатной оси схвата. Например, этими шестью величинами могут быть шесть наддиагональных элементов матрицы Тn.
Приравнивая шесть заданных величин соответствующим элементам матрицы Тn, получим систему шести уравнений (в общем случае трансцендентных), неизвестными в которых являются обобщенные координаты.
Если n = 6, то есть число неизвестных равно числу уравнений, то обычно можно отыскать вполне определенные значения обобщенных координат.
Если манипулятор имеет больше шести степеней свободы, то есть число неизвестных превышает число, то одному и тому же положению схвата могут соответствовать различные наборы значений обобщенных координат.
И наконец, если n < 6, то решения не существует, то есть за счет меньшего, чем шесть, числа обобщенных координат невозможно получить наперед заданные произвольные положение и ориентацию схвата.
Однако, если требуется лишь попадание центра схвата в определенную точку пространства ориентация схвата может быть любой, то для этой цели годится манипулятор с тремя степенями свободы. В этом случае при решении задачи потребуется составить лишь три уравнения для нахождения трех неизвестных.
Ниже, при решении обратной задачи кинематики всегда будем считать, что число неизвестных равно числу степеней свободы манипулятора.
Приравнивая первые три элемента 4-го столбца матрицы T4 к заданным величинам X4, Y4 и Z4 получаем систему трех уравнений.
(-250; 140; 480)
Принимаем S2 = 200, тогда S1 = 480 - 200 = 280
![]()
Принимаем S3 = 50, тогда S4 = 180.28 - 50 = 130.28
-150 = 180.28 * cos Q 2 Þ cos Q 2 = 0.832;
Q 2 = 33° 42¢ - 90° = -56° 18¢
3.4.9 Проверка решения
Для подтверждения правильности выполненных расчетов сделаем проверку решения графическим методом.
4. КОНСТРУКТОРСКО-ТЕХНОЛОГИЧЕСКАЯ ЧАСТЬ
4.1 Общие технические требования к печатной плате
Печатный монтаж - достижение науки пятидесятых годов двадцатого века. Промышленное освоение новых радиотехнических средств и материалов, малогабаритных вакуумных, полупроводниковых и других радиотехнических приборов, а также технологических процессов способствовало бурному развитию техники печатных схем.
В нашей стране печатный монтаж применяется с 1956 года. Опыт показывает, что печатный монтаж имеет значительные преимущества перед объемным монтажом.
К печатным платам предъявляются следующие требования:
Поверхность печатных плат не должна иметь пузырей, вздутий, посторонних включений, сколов, выбоин, трещин и расслоений материала основания, снижающих электрическое сопротивление и прочность изоляции. Допускаются одиночные вкрапления металла и следы его удаления на свободных от проводников участках, поверхностные сколы и просветления диэлектрика, ореолы, возникающие в результате механической обработки, если расстояние от проводника до указанного дефекта составляет не менее 0.3 мм. Допускаются также отдельные дефекты диэлектрика обнаруженные после травления и предусмотренные техническими условиями на фольгированные материалы.
Печатные проводники должны быть с ровными краями. В отдельных случаях допускаются неровности по краям проводников, не уменьшающие минимальной ширины проводников и расстояния между ними, предусмотренные чертежом. Отклонение размеров контактной площадки от чертежа по ширине или длине возможно, но при этом расстояние до ближайших проводников или контактных площадок в любом месте должно быть не менее минимальных величин, оговоренных в чертеже.
Толщина слоя меди, осажденной на всех металлизируемых участках печатной платы, должна быть в пределах 40 - 100 мкм, а на линиях земли, экранах и проводниках, лежащих по краям платы, она допускается до 150 мкм.
Для предохранения печатных проводников от воздействия внешней среды при длительном хранении перед сборкой, на печатные платы наносят технологическое защитное покрытие, которое удаляется после сборки и пайки, перед покрытием электроизоляционным лаком уже собранной платы.
В целях повышения механической жесткости платы (печатная плата, состоящая из материалов с различными коэффициентами температурного расширения, а также имеющая отверстия, естественно, подвержена короблению) необходимо, чтобы отношение ее длины к ширине не превышало 4:1.
Каждая плата должна иметь маркировку с указанием индекса или чертежного номера платы, а также дату изготовления.
При монтаже радиоэлектронной или электронно-вычислительной аппаратуры на печатных платах облегчаются многие технологические процессы, повышается плотность размещения элементов, снижается вероятность ошибок монтажа, а в готовой аппаратуре упрощается поиск неисправностей.
Похожие работы





... . Целью дипломного проекта является разработка и исследование автоматической системы регулирования (АСР) асинхронного высоковольтного электропривода на базе автономного инвертора тока с трехфазным однообмоточным двигателем с детальной разработкой программы высокого уровня при различных законах управления. В ходе конкретизации из поставленной цели выделены следующие задачи. Провести анализ ...
... тем достоинством, что в самом регуляторе выделяется значительно меньшая мощность, чем в нагрузке. ОСНОВНАЯ ЧАСТЬ 1 Регулирование скорости вращения асинхронных двигателей Большинство двигателей переменного тока вращается с угловой скоростью, которая определяется в первую очередь частотой питающего напряжения. Угловая скорость синхронных двигателей зависит только от частоты питания, а ...

... двигателя; кратковременный; повторно-кратковременный; ударный (момент статистической нагрузки резко увеличивается по различным законам, а затем снижается до момента холостого хода). 1 Асинхронные двигатели в системах электропривода 1.1 Параметры задания и выбор варианта задания Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной ...
... электроприводов имеет свои недостатки и ограничения. . Автоматическое управление двигателями переменного тока Асинхронные двигатели с короткозамкнутым ротором запускают прямым включением в сеть. Схемы управления двигателями переменного тока имеют коммутационную аппаратуру, устройства защиты и различные блокировки. Простейшей схемой управления асинхронным двигателем с короткозамкнутым ротором ...
0 комментариев