Анализ технологичности конструкции детали с точки зрения принятого производства
Усовершенствовать конструкцию отдельных приспособлений, добавив установочные элементы, позволяющие производить установку на столе станка с ЧПУ
Выбор последовательности и схемы обработки отдельных поверхностей
Расчет режимов резания и нормирование
Количественная оценка технологичности
Конструкторская часть
Научно-исследовательская часть
Расчет потребного количества и составление ведомости оборудования
Электрические авто – и электрические тележки;
Технико-экономическое обоснование разработанного варианта технологического процесса
Затраты на материал
Амортизационные отчисления за год
Амортизационные отчисления за год
Навигация
Научно-исследовательская часть
Изготовление детали "Корпус"
101540
знаков
10
таблиц
36
изображений
3. Научно-исследовательская часть
Обработка отверстий на станках с ЧПУ
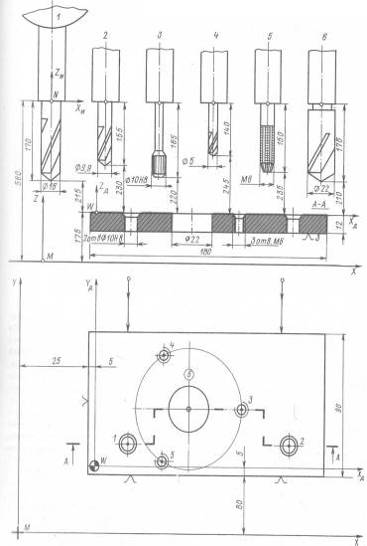
Программирование сверлильных (расточных) операций, так же как и других, начинается с составления расчетно-технологической карты, определения координат опорных точек и т.д. Эскиз обрабатываемой детали представляют в двух системах координат: станка и детали. Для сравнительно простых операций на расчетно-технологических картах показывают исходное положение всех используемых инструментов (указывают также их вылет) из шпинделя.
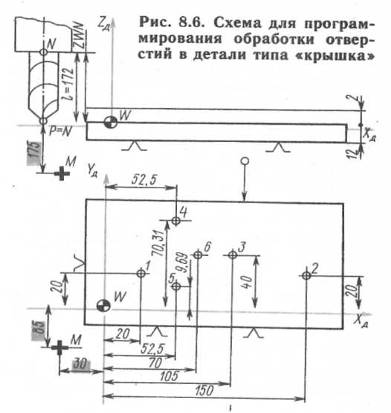
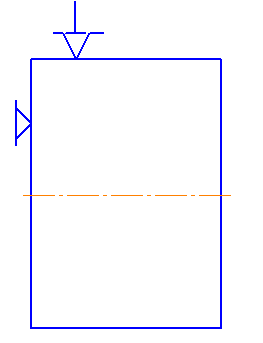
На рис. 1 показана расчетно-технологическая карта для обработки в детали типа «крышка» двух отверстий диаметром 10Н8, трех резьбовых отверстий М6, и отверстия диаметром 22 мм. В табл. 1 приведены исходные координаты центров всех отверстий в системах координат детали и станка.
Таблица 1. Координаты опорных точек (центров отверстий) при обработке отверстий в детали типа «крышка»
| Отверстие | Координата, мм | ||||
|
|
|
|
|
| |
| 1 | 20 | 20 | 50 | 105 | 175 |
| 2 | 150 | 20 | 180 | 105 | 175 |
| 3 | 105 | 40 | 135 | 125 | 175 |
| 4 | 52,5 | 70,31 | 82,3 | 155,31 | 175 |
| 5 | 52,5 | 9,69 | 82,5 | 94,69 | 175 |
| 6 | 70 | 40 | 100 | 125 | 175 |
Рис. 1. Рассчетно-технологическая карта для обработки отверстий в детали «крышка»
Общая методика программирования сверлильных операций
До расчета траектории инструментов при сверлильной обработке сначала определяют предварительный состав переходов для каждого отверстия и выбирают инструмент, затем уточняют состав переходов и общую их последовательность. Далее строят схемы осевых перемещений инструментов относительно опорных точек (центров отверстий) и назначают режим резания.
Например, предварительный состав типовых переходов для обработки отверстий 1–6 в детали типа «крышки» может быть принят следующим: центрование (рис. 2, а, б), сверление (рис. 2, в, г, ж), нарезание резьбы (рис. 2, е) и развертывание (рис. 2, д). В связи с этим выбранный инструмент Т01 – T06 может быть размещен в гнездах шестипозиционной револьверной головки сверлильного станка.
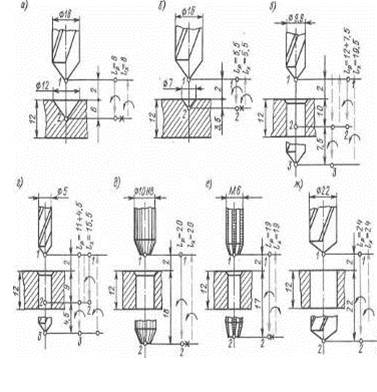
Рис. 2. Типовые переходы работы инструмента для обработки отверстий детали «крышка»
Состав инструментальной наладки: (по гнездам): 1) сверло (![]() ) диаметром 16 мм; 2) сверло диаметром 9,9 мм; 3) развертка диаметром 10Н8; 4) сверло диаметром 5 мм; 5) метчик М6; 6) сверло диаметром 22 мм. Общая последовательность переходов может быть следующей: центрование с зенкованием отверстий 1–5, сверление и развертывание отверстий 1 и 2, сверление отверстий 3–5 и нарезание в них резьбы, сверление отверстии 6. Схемы осевых перемещений для расчета опорных точек траектории инструментов при обработке отверстий 1–6 приведены на рис. 2.
) диаметром 16 мм; 2) сверло диаметром 9,9 мм; 3) развертка диаметром 10Н8; 4) сверло диаметром 5 мм; 5) метчик М6; 6) сверло диаметром 22 мм. Общая последовательность переходов может быть следующей: центрование с зенкованием отверстий 1–5, сверление и развертывание отверстий 1 и 2, сверление отверстий 3–5 и нарезание в них резьбы, сверление отверстии 6. Схемы осевых перемещений для расчета опорных точек траектории инструментов при обработке отверстий 1–6 приведены на рис. 2.
На этих схемах цифрами 1–3 показаны последовательности опорных точек траектории инструментов, стрелками – направления рабочих (![]() ) и холостых (
) и холостых (![]() ) ходов и направления вращения шпинделя. Знаком «х» обозначен выстой инструмента. Режимы резания для участков траектории приведены в табл. 2.
) ходов и направления вращения шпинделя. Знаком «х» обозначен выстой инструмента. Режимы резания для участков траектории приведены в табл. 2.
Таблица 2. Типовые переходы при обработке отверстий в детали типа «крышка»
| Переход | Номер отверстия (см. рис. 1) | Инструмент | Схема на рис. 2 | Участок траектории | sM, мм/мин | п, об/мин |
| Центрование с зенкованием | 1; 2 | Т01 | а | 1–2 | 40 | 500 |
| 3; 4; 5 | б | |||||
| Сверление | 1; 2 | Т02 | в | 1–2 | 100 | 710 |
| 2–3 | 80 | |||||
| 3; 4; 5 | Т04 | г | 1–2 | 100 | 1400 | |
| 2–3 | 80 | |||||
| 6 | Т06 | д | 1–2 | 60 | 355 | |
| Развертывание | 1; 2 | ТОЗ | 1–2 | 50 | 125 | |
| Нарезание резьбы | 3; 4- 5 | Т05 | е | 1–2 | 25 | 25 |
Кодирование информации
В общем случае кодирование информации УП для сверлильных станков сводится к кодированию процесса замены инструмента, кодированию перемещений (позиционирования) инструмента от одной опорной точки (центра отверстия) к другой и введению в действие циклов обработки отверстий в моменты, когда инструмент располагается над требуемой точкой.
Конкретная методика кодирования определяется моделью УЧПУ и ее возможностями. Рассмотрим общие положения.
Режимы движения и позиционирования задают с помощью подготовительных функций G60 – G69 (см. гл. 1). Согласно такой функции УЧПУ обеспечивает соответствующий характер подхода инструмента к заданной точке и остановку его в конкретной юно, которой и определяет точность позиционирования. В общем случае функции G60 – G64 задают позиционирование с ускоренного хода, а функции G65 – G69 – с рабочей подачи. Эти функции используют, если, например, на станках рассматриваемого типа выполняется операция прямоугольного формообразования, в частности фрезерование. Из рассмотренных функций наиболее часто применяют G60 (точное позиционирование со стороны движения) и G62 (позиционирование с ускоренного хода – грубое позиционирование).
Напомним, что при точном позиционировании обеспечивается ступенчатое снижение скорости движения: от ускоренной (или заданной) до минимальной скорости подхода к заданной точке. При грубом позиционировании происходит отключение подачи ускоренного ходи в зоне остановки, в результате чего возможен или перебег, или недобег.
Например, если необходимо последовательно позиционировать инструмент от точки к точке, то записывают:
N{i} G90 G60 Х(Х1) Y(Y1) LF
N {i+1} Х(Х2) Y(Y2) LF
N {i+2} Х(Х3) Y(Y3) LF
Реализация постоянных циклов обработки отверстий
Такие циклы реализуются заданием подготовительных функции G81‑G89. Каждая из них, согласно ГОСТ 20999–83 (СТ СЭВ 3585–82), определяет конкретную операцию или переход (с перемещением по оси Z): сверление или центрование (G81), сверление или зенкерование с паузой в конце рабочего хода (G82), глубокое сверление (G83), G84 – нарезание резьбы и др. Как правило, в современных УЧПУ подпрограммы для реализации указанных функций постоянно находятся в памяти УЧПУ и достаточно указать в кадре УП требуемую функцию и числовое значение формальных параметров, необходимых для выполнении конкретной операции. Для большинства постоянных циклов этих параметров два: R и z. Параметр R в большинстве УЧПУ определяет координату, с которой начинается рабочая подача при исполнении заданного постоянного цикла. Эта величина сохраняется в памяти УЧПУ до считывания нового значения R. Параметр z в постоянном цикле определяет координату точки, в которую инструмент смещается на рабочей подаче.
При введении постоянных циклов существенное значение для параметров R и z имеет расположение нуля станка (начало координатной системы станка) относительно обрабатываемой детали в направлении оси Z.
В УЧПУ с фиксированным началом координат станка параметры R и z в постоянных циклах отсчитываются от нулевой плоскости в одном направлении (рис. 3, а). Поэтому кадр задания постоянного цикла, например сверления, имеет вид
N{i} G81 Z157.5 R177. LF
В кадре указываются координаты точки 1 (R) и конечной точки 2 (z).
Программирование постоянных циклов значительно удобнее для станков с УЧПУ, имеющих «плавающий нуль». В таких УЧПУ по командам УП или с пульта УЧПУ можно смещать, нуль станка в любую точку по всем осям, в частности по оси Z. В ряде УЧПУ по оси Z смещается нулевая плоскость XMY (рис. 3, б). Тогда в кадре, предшествующем кадру с указанием постоянного цикла, должна быть команда на смещение нуля по оси Z. После смещения нуля точка М начала координат станка будет располагаться в плоскости, параллельной плоскости детали (в точке М, рис. 3, б). Для рассмотренного случая величина R будет равна нулю, а значение z будет со знаком минус (в отсчете вниз от новой системы координат X'M'Z):
N{i} G59 Z177. LF
N {i+1} G81 Z‑19.5 R0. LF
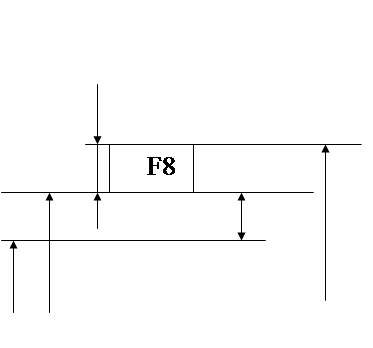
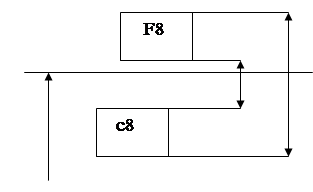
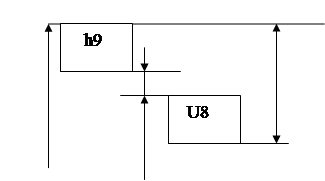
Определенные удобства создаются дли программирования, если УЧПУ имеют команды на сдвиг нуля, кодируемые функциями G92, G54‑G59. В этом случае при программировании постоянных циклов нулевую плоскость совмещают с верхней плоскостью детали. (рис. 3, в).
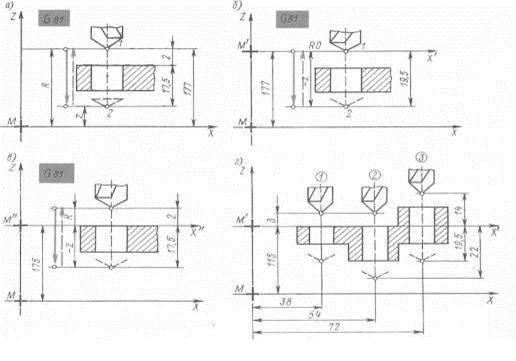
Рис. 3. Схемы задания параметров R и z в постоянных циклах
Тогда при задании цикла указывают величину R, которая означает здесь недоход инструмента до обрабатываемой поверхности, и величину z – рабочий ход инструмента. При этом полный рабочий ход, так же как и обратный – холостой ход, будет равен сумме R+z. При таком задании цикла достаточно просто обрабатывать одинаковые отверстия, расположенные на ступенчатой поверхности. Например, кадры УП для обработки трех отверстий 1–3, расположенных рядом (рис. 3, г), имеют вид:
N{i} G59 Z115. LF
N {i+1} G81 R3. Z‑19.5 LF
N {i+2} G60 Х54. LF
N {i+3} R3. X‑22. LF
N {i+4} R14. LF
N {i+5} Х72. LF
Как видно из программы, действие команды G81 (постоянный цикл) распространяется на последующие кадры. Действующий постоянный цикл отменяется указанием функции G80. В рассматриваемом примере смещение нуля кодируется функцией G59. Эта команда сохраняется в УП до введения аналогичной команды с новым числовым значением или до команды G53 (отмена смещения, но только для кадра, где G53 записано). Смещение нуля лишь в одном кадре обычно записывается функцией G92. При использовании функции G59 возврат нуля в систему координат станка кодируется этой же функцией (G59) с нулевым числовым значением:
N{1} G59 Z0. LF
Кодирование процесса замены инструмента
Эта задача во многом зависит от конструктивных особенностей станка и УЧПУ. В большинстве случаев требуются как минимум, две команды, задаваемых в последовательных кадрах УП. В первой команде с адресом Т указывается требуемый инструмент, а по второй команде (М06) он устанавливается в шпинделе. По команде М06, кроме того, снимается отработавший инструмент и возвращается в магазин (при наличии магазина на станке).
Как правило, процесс замены инструмента у станков выполняется только в определенном (безопасном) положении шпинделя (шпиндельной бабки). В это положение шпиндель автоматически приходит по команде М06 или по специальной команде, которую надо указывать в кадрах УП, предшествующих команде М06.
Указание инструмента в кадрах УП обычно сопровождается указаниями по его коррекции. Как уже говорилось, совместно с кодом инструмента указывается номер его корректора. Так, для инструмента с кодом Т08 и корректором 06 общая запись команды на инструмент имеет вид Т0806.
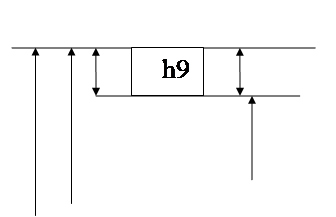
Для задания осепараллельной коррекции длины инструмента, что характерно для станков сверлильной группы, используют подготовительные функции G43 и G44. Для коррекции вылета инструмента (рис. 4) в корректор заносится абсолютная разность между расчетной и действительной аппликатами вершины инструмента (z0 – z1)=Δz или (z0 – z2)=Δz и в УП записывается
N{1}… G44…Z{Z0}… Т0806…
если инструмент короче запрограммированного. Если же инструмент длиннее запрограммированного, то кадр будет таким:
N{i}… G43…Z{Z0}… Т0806…
При этом предполагается, что величина Δz установлена на корректоре указанного номера (в данном примере на корректоре 06).
В современных УЧПУ, однако, в большинстве случаен коррекция па длину инструмента задается с адресом Н. В этом случае функция G43 определяет, что числовое значение смещении, установленное на корректоре (со знаком + или –), прибавляется к заданной координате. Функция G44 означает, что величина смещения, установленная на корректоре с адресом Н, отнимается от заданного в данном кадре значения координатного размера.
Напомним, что в ряде случаев корректор инструмента может указываться отдельным адресом, например D.
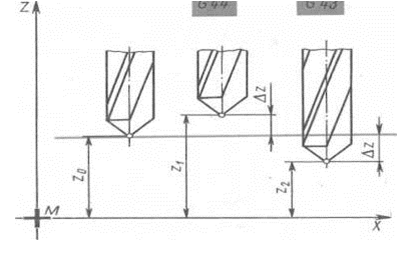 |
Рис. 4. Схема для определения коррекции вылета инструмента
Подготовка УП по общей методике
Проследим общую методику кодирования информации УП для обработки детали, которая показана на рис. 1, а выбранные типовые переходы – на рис. 2.
Первыми переходами, согласно принятой схеме операции, являются переходы по центрованию всех отверстий, причем отверстия 1, 2 должны быть зацентрированы на глубину 6 мм, а отверстия 3–5 – на глубину 3,5 мм (см. рис. 2, а, б и табл. 2).
На примере программирования работы первого инструмента (сверло диаметром 16 мм, кодовый номер Т01, корректор 01) рассмотрим порядок кодирования информации для случаев без смещения нуля системы координат по оси Z:
% LF
N1 G60 G80 Т0101 LF
N2 F40. S500 М06 LF
N3 G44 Z390. LF
N4 Х50. Y105. LF
В первом кадре указаны работающий инструмент и подготовительные функции G60 (точное позиционирование) и G80 (отмена постоянных циклов) Последнее обязательно для того, чтобы очистить рабочую память УЧПУ от ранее запрограммированных команд по постоянным циклам Во втором кадре дана команда на смену инструмента (М06), указаны режимы его работы: подача 40 мм/мин и частота вращения шпинделя 500 об/мин. Третий кадр указывает на необходимость коррекции. При этом дается расчетный вылет инструмента (положение вершины) по оси Z и указывается функция коррекции G44 для укороченных инструментов. Четвертым кадром инструмент позиционируется в точку 1, определенную в системе координат станка координатами хс = 50 мм, ус= 105 мм (см. табл. 1). Следующим кадром необходимо вывести вершину инструмента в точку, которой соответствует недоход над плоскостью детали 2 мм. Чтобы вершина данного инструмента пришла в эту точку, необходимо сместить точку N шпинделя (см. рис. 1).
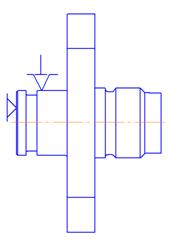
При работе в абсолютной системе координат программируется перемещение базовых точек узлов станка и перемещения этих точек выводятся на индикацию. В данном случае базовой для всех инструментов принята плоскость положения базовой точки N шпинделя, определенная координатой z= 560 мм. При положении торца шпинделя в этой плоскости происходит и смена инструментов. Для вывода сверла диаметром 16 мм (с расчетным вылетом 170 мм) в точку начала работы по циклу необходимо позиционировать шпиндель (его точку N) по оси Z в точку Ni с координатой R = 347 мм (560 – 213 = 347) – рис. 5. Координата положения торца шпинделя в конце рабочего хода сверла (точка N2) определится координатой z = 347 – 8 = 339 мм. Эти данные и следует записать с адресами R и z при программировании постоянного цикла:
N5 G82 R347. Z339. LF
После исполнения команды кадра N5 торец шпинделя будет расположен в плоскости, определенной координатой R=347 мм
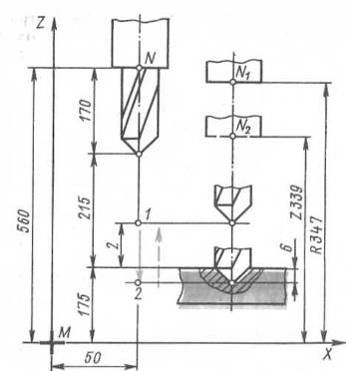
Рис. 5. Схема для определения перемещений при центровании отверстий
Для обработки следующих отверстий по заданному циклу G82 достаточно теперь программировать только перемещения по осям X и Y. В кадрах, где изменяется координата z (центрование отверстий 3–5), следует ее указать. Естественно, что указанная в кадре N7 величина z отрабатывается в последующих кадрах тоже:
N6 Х180. Y105. LF
N7 Х135. Y125. Z341.5 LF
N8 Х82.3 Y155.31 LF
N9 Х82.5 Y94.69 LF
N10 Х100. Y125. L.F
N11 G80 Т0202 LF
Кадр N11 отменяет цикл G82 и задает новый инструмент.
Упрощенная методика программирования сверлильных операций
Рассмотренная методика программирования сравнительно сложна, требует пересчета некоторых размеров, а главное, определения и учета вылета инструмента в процессе программирования. Ее применяют, когда действительные вылеты инструментов мало отличаются от расчетных, когда применима система предварительной регулировки вылета инструмента в специальных приспособлениях. Программирование становится значительно проще, если использовать возможности УЧПУ по смещению нуля и вводить коррекцию на инструмент в период наладки (настройки) станка исходя из действительного его вылета. Это не только облегчает кодирование информации, но в значительной мере упрощает составление РТК (рис. 8.6): нет необходимости задаваться вылетом инструментов, не нужен пересчет координат точек из системы координат детали в систему координат станка и т.д.
Все это объясняется тем, что нуль станка смещается в начало координат до тали (из точки М в точку W) и отсчет программируемых перемещений и процессе отработки УП ведется от точки W, т.е. так, как это задано на чертеже детали. Кроме того, при настройке станка вылет каждого инструмента вводится (с обратным знаком) в корректор этого инструмента. Делается это просто. Инструмент доводят до касания вершины Р с верхней плоскостью заготовки, установленной в приспособлении. На табло, предназначенном для индикации перемещения по оси Z, высвечиваются цифры, определяющие расстояние от плоскости нового нуля до базовой точки шпинделя, т.е. величина zWN – l. А это и есть действительный вылет инструмента (например, для сверла диаметром 16 мм он равен 172 мм). Если теперь на корректоре инструмента набрать величину zWN – l (172 мм), то на табло индикации по оси Z будут нулевые показания, т.е. базовая точка N совместится с вершиной Р инструмента. Подобную настройку (с касанием инструмента острием или торцом поверхности детали) проводят для каждого инструмента, и значения соответствующих вылетов набирают на соответствующих корректорах. Таким образом, для всего набора инструментов на данную операцию справедливо положение: при нахождении вершины инструмента в плоскости нового нуля табло индикации по оси Z показывает нули.
При настройке достаточно просто также совмещать ось шпинделя с началом координат детали.
Подготовка УП по упрощенной методике
Приняв во внимание сказанное выше, программу обработки рассматриваемой детали можно представить следующим образом:
% LF
N1 G60 G80 Т0101 LF
N2 F40. S500 М06 LF
N3 G59 ХЗО. Y85. Z175. LF
В кадрах N1 – N3 задают инструмент Т01, условия его работы и указывают на смещение нуля (G59) по трем осям.
N4 Х20. Y20. LF
N6 G82 R2. Z‑6.LF
В кадре N5 задают постоянный цикл и шипения параметров в соответствии со схемой на рис. 2, а
В кадре N7 дают команды на позиционирование в точку 3 и исполнение заданного цикла (G82) с новым значением z (–3,5 мм).
N8 Х52.5 Y70.31 LF
N9 Y9.69 LF
N10 Х70. Y40. LF
N11 G80 ТО202 LF
Кадр N11 завершает работу сверлом диаметром 16 мм (ТО 101) и готовит к вводу новый инструмент – сверло диаметром 9,9 мм (Т0202).
N12 F100. S710 М06 LF
N13 Х20. Y20. М08 LF
Кадры N12 и N13 задают режимы инструмента и установку его в шпиндель (команда М06). Выполнено позиционирование сверла в точку /, включено охлаждение (команда М08).
N14 G83 R2 Z‑10. LF
N15 Z‑17.5 F80. LF
Кадр N14 указывает постоянный цикл глубокого сверления (G83) и его параметры. Указывать параметр R необходимо, поскольку он определяет точку выхода (на ускоренном ходу) инструмента с позиции замены в рабочую позицию по оси Z. Кадр N15 дополняет кадр N14, указывая координату второго хода с измененной подачей (согласно принятой схеме обработки – рис. 2, в, подача на выходе сверла уменьшается до 80 мм/мин).
N16 X150. Y20. Z‑10. F100. LF
N17 Z‑17.5 F80. LF
Кадрами N16 и N17 программируется сверление по циклу G83 отверстия с центром в точке 2.
N18 G80 Т0404 LF
В кадре N18 готовится к вводу сверло диаметром 5 мм (Т0404) и задаются режимы его работы
N19 F100. S1400 М06 LF
N20 Х105. Y40. LF
N21 G83 R2. Z‑9. LF
N22 Z‑13.5 F80. LF
N23 Х52.5 Y70.31 Z‑9. F100. LF
N24 Z‑13.5 F80. LF
N25 G80 Т0606 LF
Кадры N19‑N24 программируют обработку сверлом диаметром 5 мм по циклу G83 отверстий в ТкЗ, 4, 5. Кадр N25 указывает новый инструмент – сверло диаметром 22 мм (Т0606).
N26 F60. S355 М06 LF
N27 Х70. Y40. LF
N28 G81 R2. Z‑22. LF N29 G80 Т0303 LF
Кадры N26 – N28 программируют сверление отверстия диаметром 22 мм с центром в точке 6. Указывается новый инструмент – развертка диаметром 10Н8 (Т0303).
N30 F50. S125 М06 LF
N31 Х20. Y20. LF
N32 UUU R2. Z‑18. LF
Кадр N32 вводит цикл развертывания (G89) с рабочим ходом R + z, выдержкой в конце рабочего хода и отводом на быстром ходу (рис. 2, д)
N33 Х150. LF
N34 G80 Т0505 LF
Кадром N33 запрограммировано развертывание отверстия в точке 2. Кадр N34 готовит новый инструмент – метчик Мб (Т0505).
N35 F250. S250 М06 LF
N36 Х105. Y40. LF
N37 G84 R2. Z‑17. LF
N38 Х52.5 Y70.31 LF
N39 Y9.69 LF
N40 G80 G59 ХО. Y0. Z0. М09 LF
N41 G00 ХО. YO. Z560. MOO LF
Кадры N35 – N39 программирует нарезание резьбы в отверстиях 3–5 в соответствии с постоянным циклом G84. Цикл обеспечивает рабочий ход с рабочей подачей, остановку и реверсивное вращение шпинделя в конечной точке, возврат инструмента с рабочей подачей.
Кадры N40, N41 отменяют смещение нуля, отключают охлаждение и выводят шпинделя в нулевую точку станка с координатой z = 560 мм.
Программирование расточных операций
Программирование обработки отверстий на расточных станках и кодирование информации УП практически аналогичны рассмотренным выше, хотя для расточных станков характерно значительно большее число возможных команд, расширение и усложнение постоянных циклов и др. Наличие у расточных станков дополнительных (вторичных) управляемых осей, необходимость закреплять (для повышения жесткости) гильзу шпинделя или столы (при некоторых видах обработки) несколько усложняют программирование. У ряда станков управляемым является также •поворот стола, смена приспособлений-спутников и др.
Рассмотрим три примера программирования обработки отверстий при использовании расточных станков.
Сверление трех отверстий диаметром 18 мм одним сверлом в детали типа «угольник» (рис. 7).
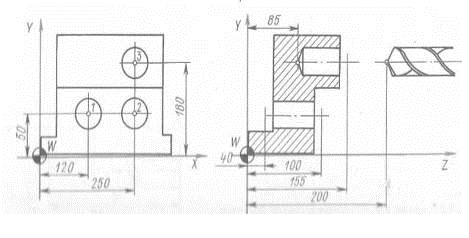
Рис. 7. Схема для программирования сверления отверстий в детали типа «угольник»
Фрагмент программы:
N100 G90 G43 G81 D60 Х120. Y50.
Z40. R100. F40. S120 МОЗ М08 LF
По команде кадра N100 ранее установленным сверлом сверлится отверстие 1 (рис. 8.7) с координатами х=120 мм, у = 50 мм; глубина сверления определена координатой z = 40 мм; R = 100 мм. Отсчет размеров – абсолютный (G90). Вводится коррекция на длину инструмента (G43) (корректор 60 с адресом D). Корректор 60 должен быть закреплен за используемым в данной программе сверлом. Подача сверления 40 мм/мин (F40); частота вращения шпинделя 120 об/мин (S120); вращение шпинделя правое (М03). Включается охлаждение (М08).
4. Проектирование участка механической обработки
Похожие работы

... Допустить к защите: «___» ____________ 2000 г. Руководитель ______________Пояснительная записка к курсовому проектуТема проекта: «Разработать инструментальную оснастку к технологии изготовления детали «корпус» в условиях обработки на станках с ЧПУ»Проект выполнил студент: Бакачёв Андрей Игоревич шифр: 96009 группа: МТ-8 факультет: ВФ Специальность: 1201 Нормоконтроль ...
... газопроницаемость оболочек, что защищает поверхность от пригара. По мере выгорания смолы форма теряет свою прочность и разрушается, не препятствуя свободной усадке сплава и упрощая выбивку отливки. Процесс изготовления оболочковых форм легко механизировать и автоматизировать. Недостатком являются ограничение размеров и массы отливок – примерно до 100 кг. С увеличением толщины сечения и при ...
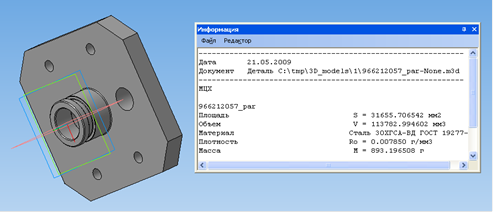
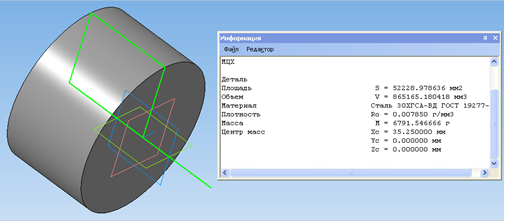
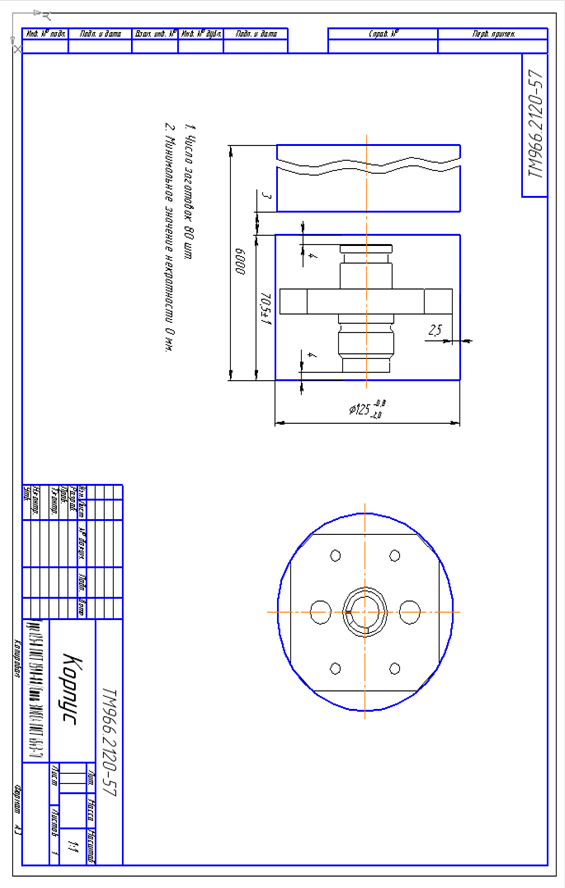
... ТП изготовления детали "Корпус ТМ966.2120-57" и статистического приемочного контроля Применение статистического регулирования технологического процесса изготовления детали "Корпус ТМ966.2120-57" представляет собой корректировку параметров процесса по результатам выборочного контроля параметров продукции, осуществляемого для технологического обеспечения заданного уровня качества. Статистическое ...

... регулирования ТП изготовления детали «Корпус ТМ966.2120-35» и статистического приемочного контроля Применение статистического регулирования технологического процесса изготовления детали «Корпус ТМ966.2120-35» представляет собой корректировку параметров процесса по результатам выборочного контроля параметров продукции, осуществляемого для технологического обеспечения заданного уровня качества. ...
0 комментариев