Постановка проблеми
Вихороутворення при обтіканні нерухомих тіл
Приймачі-перетворювачі вихрових коливань
Обчислювальні експерименти з різними моделями завад та фільтрів
Обчислювальні експерименти без урахування квадратичної залежності амплітуди від частоти
Обчислювальні експерименти з урахування квадратичної залежності амплітуди від частоти
Визначення кількості перетинів корисного сигналу з нульовим рівнем за допомогою методики для квантованого у часі сигналУ
НК – алгоритм. Параметричний фільтр АR(1)
Параметричний фільтр МА(1)
Корисний сигнал з двома і більше гармоніками
Комбінування алгоритму НК з попередньою фільтрацією фільтром низьких частот
ОХОРОНА ПРАЦІ І НАВКОЛИШНЬОГО СЕРЕДОВИЩА
Освітлення
Випромінювання від екрана
Експлуатаційні заходи електробезпеки
ТЕХНІКО-ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ НАУКОВО-ДОСЛІДНОЇ РОБОТИ
Технічна підготовка НДР
Розрахунок собівартості
Відрахування на соціальні заходи
Навигация
Обчислювальні експерименти з різними моделями завад та фільтрів
Моделювання процесу обробки сигналів датчика у вихровому потоковимірювачі
123841
знак
18
таблиц
78
изображений
3 Обчислювальні експерименти з різними моделями завад та фільтрів
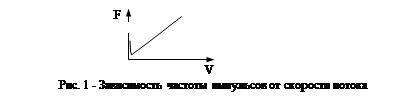 Межі вимірювань при використанні вихрових потоковимірювачів кінцеві. Тому що у них частота вихорів при зниженні швидкості зменшується разом з суттєвим зменшенням амплітуди сигналу датчика [3]. Так, експериментально отримана залежність між швидкістю потоку й частотою сформованих імпульсів виглядала як на рисунку 3.1:
Межі вимірювань при використанні вихрових потоковимірювачів кінцеві. Тому що у них частота вихорів при зниженні швидкості зменшується разом з суттєвим зменшенням амплітуди сигналу датчика [3]. Так, експериментально отримана залежність між швидкістю потоку й частотою сформованих імпульсів виглядала як на рисунку 3.1:
| |||||
| |||||
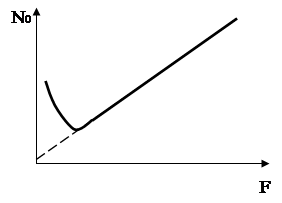 | |||||
Рисунок 3.1 - Залежність частоти імпульсів від швидкості потоку.
Підставою для припинення вимірів є досягнення допустимого рівня похибки, що у свою чергу можна здійснити, оцінюючи кількість “зайвих” сформованих імпульсів при вимірюванні частот сигналу низького рівня.
З наведеного вище рисунка видно, що існує певний рівень, при досягненні якого відбувається нарощування зайвих імпульсів. При низьких частотах і малих рівнях сигналу шуми перебувають в області верхніх вимірюваних частот і фільтрація шумів може шкодити корисним сигналам в області верхніх частот діапазону вимірів, таким чином, коли потік стає ламінарним, спостерігається нагромадження зайвих імпульсів (помилки внаслідок відносного збільшення рівня шуму над корисним сигналом).
При високих частотах, коли частота сигналу більше частоти шуму, може виникнути ситуація, коли амплітуда шуму буде більше амплітуди сигналу. У цьому випадку також будуть помилки.
Вважаємо за можливе при відповідному ускладненні приладу визначати ситуацію, коли варто припинити рахувати імпульси і сповістити користувача або супутні системи про це.
Вираз для обчислення математичного очікуванної кількості нулів для суми фіксованого синусоїдального сигналу й нормального випадкового шуму, запропонований Райсом [4] і отриманий пізніше Бендатом іншим шляхом, за свідченням Бендата «занадто складний для практичних цілей і не узгодиться з результатами крім як у нецікавому випадку, коли синусоїдальна складова відсутня».
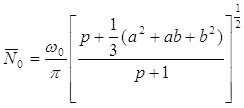
У вираз входить інтеграл, що може бути обчислений лише чисельними методами. Для окремих випадків, наприклад, для білого шуму з обмеженою смугою частот, Бендат [5] пропонує вираз:
 , (3.1)
, (3.1)
де ![]() - кругова частота;
- кругова частота;
p – відношення сигналу до шуму;
a![]() 1 і b
1 і b![]() 1 константи такі що
1 константи такі що ![]() , де
, де ![]() - частота синусоїдального сигналу,
- частота синусоїдального сигналу, ![]() - смуга частот, які пропускаються фільтром.
- смуга частот, які пропускаються фільтром.
У даній формулі частота синусоїди вважається постійною.
Трохи іншим аспектам присвячена робота [6]. Кедем у своїй роботі [7] застосовує до рішення цього питання спектральний аналіз, а в роботі [8] робить аналіз кількості перетинань методом вищих порядків (Higher Order Crossings). Ідея методу полягає в тому, щоб поєднувати підрахунок кількості переходів через нуль із фільтрами. Пізніше Кедем разом з Барнеттом визначали число переходів через нуль у добутках гаусових процесів [9].
В поданому розділі була проведена робота по визначенню і порівнянню оцінок кількості переходів через нуль, отриманих аналітичним шляхом і шляхом обчислювального експерименту.
Для перевірки виконання на практиці формули (3.1) був проведений експеримент на ПК. Для того, щоб надалі використати отриману модель генератора для розробки алгоритму обробки сигналу.
Проведені розрахунки більш наближені до реальних датчиків.
Параметри, які є незмінними у всіх експериментах наведені нижче:
- мінімальна кількість точок дискретизації на період синусоїди 10;
- мінімальна частота корисного сигналу 20 Гц;
- максимальна частота корисного сигналу 500 Гц;
- довжина випадкової реалізації 4096;
0 комментариев