Расчет и конструирование двигателя
Расчет обмотки статора
Расчет размеров зубцовой зоны статора и воздушного зазора
Расчет ротора
Расчет магнитной цепи
Расчет параметров рабочего режима
Расчет потерь
Расчет рабочих характеристик
Расчет пусковых характеристик
Тепловой и вентиляционный расчет
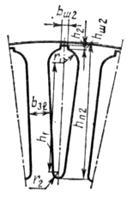
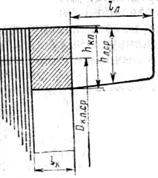
Механический расчет
Моделирование двигателя
Навигация
Моделирование двигателя
Проектирование электродвигателя асинхронного с короткозамкнутым ротором мощностью 37 кВт
40364
знака
154
таблицы
12
изображений
2. Моделирование двигателя
Моделирование прямого пуска спроектированного двигателя выполняется на холостом ходу с последующей нагрузкой после выхода на установившийся режим (через 5с) номинальным моментом (Mном=119,702 Н·м).
Моделирование выполняется в среде ПМК МИК-АЛ с учетом вышеуказанных замечаний без учета эффекта вытеснения тока с постоянными параметрами схемы замещения машины в двух вариантах:
– для параметров номинального режима;
– для параметров пускового режима.
Текст программы в ПМК МИК-АЛ для номинального режима:
$ВВОД
$УРАВН(Т)
{* Параметры НОМИНАЛЬНОГО режима *}
u:=537.4; P:=1; Rs:=0.253; Rrw:=0.191; Wk:=0;
Lm:=0.1223; Ls:=0.12507; Lr:=0.12588; J:=1.5; Mc:=0;
{* Питающие напряжения *}
Usa=N#sin_t(u:ПАР=1,314.15926,0.0);
Usb=N#sin_t(u:ПАР=1,314.15926,4.1888);
Usc=N#sin_t(u:ПАР=1,314.15926,2.0944);
Usal1=(-0.4082483)*(Usb+Usc)+0.8164967*Usa;
Usbet1=0.7071068*(Usb-Usc);
{*Преоразование в произвольную систему координат*}
FI'=P*Wk;
Usu=Usal1*N#cos(FI)+Usbet1*N#sin(FI);
Usv=-Usal1*N#sin(FI)+Usbet1*N#cos(FI);
{* Потокосцепления статора и ротора *}
Fsu'=Usu-Isu*Rs+P*Wk*Fsv;
Fsv'=Usv-Isv*Rs-P*Wk*Fsu;
Fru'=0-Iru*Rrw+Frv*P*(Wk-W);
Frv'=0-Irv*Rrw-Fru*P*(Wk-W);
{* Токи статора и ротора *}
{* СЛАУ *}
СЛАУ: Isu,Iru;
Ls*Isu+Lm*Iru=Fsu;
Lr*Iru+Lm*Isu=Fru;
СЛАУ: Isv,Irv;
Ls*Isv+Lm*Irv=Fsv;
Lr*Irv+Lm*Isv=Frv;
{* Электромагнитный момент и скорость *}
M=P*(Fsu*Isv-Fsv*Isu);
W'=(M-Mc)/J;
IstA=Isu/1.73;
КОНЕЦ
* Задание на эксперимент *
ИНТ RKT4
ШАГ ИНТ=0.001
ШАГ ВЫВ=0.006
КОН ВР=5
ВЫВОД Isu,Isv,IstA,Iru,Irv,Fsu,Fsv,W,M
ДИСПЛ W,M,Isu,Iru
$КОН
$СТОП
Текст программы в ПМК МИК-АЛ для пускового режима:
$ВВОД
$УРАВН(Т)
{* Параметры ПУСКОВОГО режима *}
u:=537.4; P:=1; Rs:=0.253; Rrw:=0.254; Wk:=0;
Lm:=0.208; Ls:=0.212; Lr:=0.21258; J:=1.5; Mc:=0;
{* Питающие напряжения *}
Usa=N#sin_t(u:ПАР=1,314.15926,0.0);
Usb=N#sin_t(u:ПАР=1,314.15926,4.1888);
Usc=N#sin_t(u:ПАР=1,314.15926,2.0944);
Usal1=(-0.4082483)*(Usb+Usc)+0.8164967*Usa;
Usbet1=0.7071068*(Usb-Usc);
{*Преоразование в произвольную систему координат*}
FI'=P*Wk;
Usu=Usal1*N#cos(FI)+Usbet1*N#sin(FI);
Usv=-Usal1*N#sin(FI)+Usbet1*N#cos(FI);
{* Потокосцепления статора и ротора *}
Fsu'=Usu-Isu*Rs+P*Wk*Fsv;
Fsv'=Usv-Isv*Rs-P*Wk*Fsu;
Fru'=0-Iru*Rrw+Frv*P*(Wk-W);
Frv'=0-Irv*Rrw-Fru*P*(Wk-W);
{* Токи статора и ротора *}
{* СЛАУ *}
СЛАУ: Isu,Iru;
Ls*Isu+Lm*Iru=Fsu;
Lr*Iru+Lm*Isu=Fru;
СЛАУ: Isv,Irv;
Ls*Isv+Lm*Irv=Fsv;
Lr*Irv+Lm*Isv=Frv;
{* Электромагнитный момент и скорость *}
M=P*(Fsu*Isv-Fsv*Isu);
W'=(M-Mc)/J;
IstA=Isu/1.73;
КОНЕЦ
*Задание на эксперимент*
ИНТ RKT4
ШАГ ИНТ=0.001
ШАГ ВЫВ=0.006
КОН ВР=5
ВЫВОД Isu,Isv,IstA,Iru,Irv,Fsu,Fsv,W,M
ДИСПЛ W,M,Isu,Iru
$КОН
$СТОП
Результаты моделирования пускового и номинального режимов в среде ПМК МИК-АЛ представлены на рис. 3, 4, 5, 6.
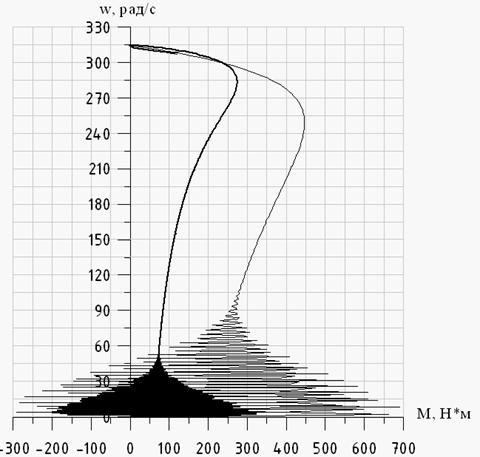
Рис. 3 - Динамическая механическая характеристика ![]() : ––––– для номинального режима; – – – для пускового режима.
: ––––– для номинального режима; – – – для пускового режима.
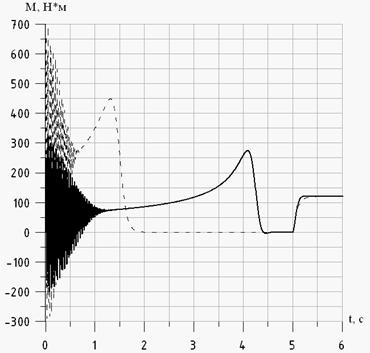
Рис. 4 - Зависимость электромагнитного момента от времени: ––––– для номинального режима; – – – для пускового режима
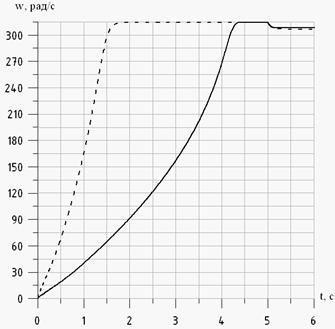
Рис. 5 - Зависимость угловой частоты вращения ротора от времени: ––––– для номинального режима; – – – для пускового режима
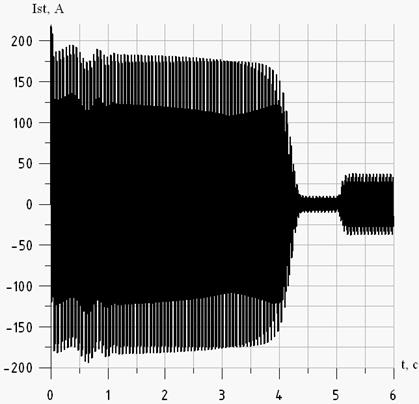
Рис. 6 - Зависимость тока фазы А статора от времени для номинального режима
3. Исследовательская часть
Целью исследовательской части является исследование влияния закона управления ![]() на динамические пусковые характеристики.
на динамические пусковые характеристики.
Частотный способ регулирования частоты вращения позволяет применять более надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты. В качестве последнего используют либо синхронные генераторы с переменной частотой вращения и чаще всего приоритетнее использование преобразователей на полупроводниковых элементах (тиристорах и IGBT транзисторах) [4].
В данном разделе будет произведено моделирование в среде Matlab v6.1 пуска электропривода с асинхронным двигателем с короткозамкнутым ротором по закону ![]() при питании каждой фазы от однофазного инвертора, спроектированным в данной курсовой работе.
при питании каждой фазы от однофазного инвертора, спроектированным в данной курсовой работе.
Моделирование производится с постоянным абсолютным скольжением для двух случаев: при ![]() и скольжении, близком к критическому
и скольжении, близком к критическому ![]() ; пуск выполняется с увеличением частоты от 0 до 50 Гц. Наброс нагрузки со значением номинального момента производится при t=6 c.
; пуск выполняется с увеличением частоты от 0 до 50 Гц. Наброс нагрузки со значением номинального момента производится при t=6 c.
Структурная схема в среде Matlab v6.1 представлена на рис. 7.
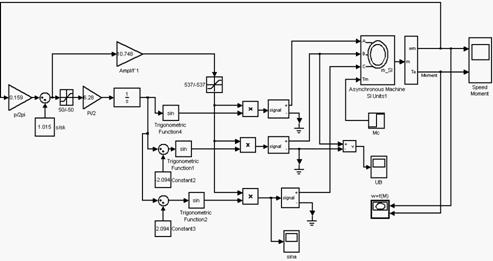
Рис. 7 - Структурная схема пуска АД по закону ![]()
Результаты моделирования представлены на рис. 8, 9, 10, 11.
Результаты моделирования в среде Matlab v6.1:
![]()
![]()
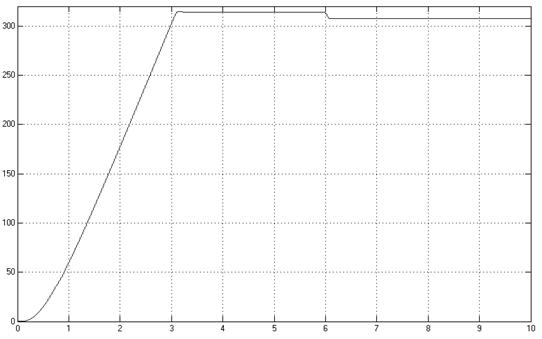
Рис. 8 - Зависимость угловой скорости от времени при ![]()
![]()
![]()
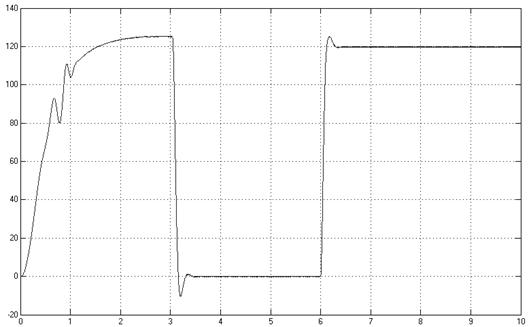
Рис. 9 - Зависимость момента от времени при ![]()
![]()
![]()
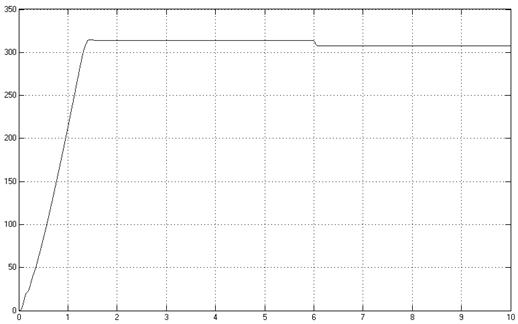
Рис. 10 - Зависимость угловой скорости от времени при ![]()
![]()
![]()
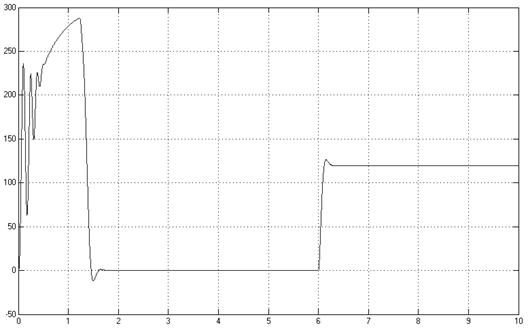
Рис. 11 - Зависимость момента от времени при ![]()
4. Выбор схемы управления двигателем
Выбор схемы управления производим по рекомендациям [5] с учетом требований задания курсового проекта:
– напряжение сети 660 В
– мощность сети ограниченная
– тип электропривода реверсивный, регулируемый
– характер нагрузки вентиляторная
– условия пуска при постоянном моменте
– требования к регулированию скорости (для регулируемых электроприводов) (0,1 – 1,5)ωном
Схема управления АИН АД представлена на рис. 12.
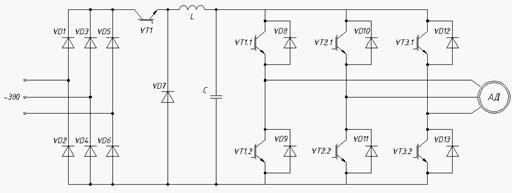
Рис. 12 - Автономный инвертор напряжения на IGBT транзисторах
Трехфазное напряжение, подаваемое из сети, поступает на выпрямитель сформированный из диодов VD1 … VD6, в котором происходит выпрямление этого напряжения. За счет IGBT транзистора VT1 и диода VD7 имеется возможность ограничивать напряжение, подаваемое на автономный инвертор напряжения, собранный на IGBT транзисторах VT1.1 … VT3.2 и диодах VD8 … VD13.
Для уменьшения пульсаций преобразования тока, в схеме установлен дроссель L с достаточно большой индуктивностью, а с помощью конденсатора С происходит уменьшение пульсаций напряжения.
Заключение
В заключение хотелось бы отметить, что поставленная цель курсового проектирования, т.е. освоение основных приемов проектирования трехфазного асинхронного двигателя с короткозамкнутым ротором в принципе была достигнута, хотя и потребовала значительного времени для нахождения оптимальных параметров расчета, поэтому основная вычислительная часть курсового проекта была произведена на ЭВМ.
При выполнении курсового проекта был решен ряд задач, спроектированный двигатель по условиям задания удовлетворяет условиям пуска; в результате теплового расчёта было установлено, что вентилятор двигателя обеспечивает достаточное его охлаждение и защиту от перегрева.
В ходе расчета каждого раздела курсового проекта осуществлялось сравнения с аналогом проектируемого двигателя.
Анализируя расхождения данных, приведенных в аналоговом двигателе и полученных в результате расчетов, необходимо отметить, что эти расхождения, хотя и минимальны, имеют место в результате приближенного определения электромагнитных нагрузок, выбора значений по кривым намагничивания и т.п., поэтому это наложило свой отпечаток на рассчитанные данные.
Элементы механической части были выбраны в соответствии с условиями прочности и износостойкости в продолжительном режиме работы.
В результате моделирования спроектированного двигателя были определены характеристики двигателя с параметрами номинального и пускового режима.
Исследовательской частью данного курсового проекта являлось исследование влияния закона управления U/f=const на динамические пусковые характеристики.
В ходе исследования было установлено, что этот способ позволяет поддерживать максимальный момент, учитывая постоянство магнитного потока.
Спроектированный двигатель в целом удовлетворяет техническому заданию и требованиям, предъявляемым при разработке новых двигателей.
Список литературы
1. Копылов И.П. Проектирование электрических машин: том 1./Под ред. И.П. Копылова. – М.: Энергоатомиздат, 1993.
2. Копылов И.П. Проектирование электрических машин: том 2./Под ред. И.П. Копылова. – М.: Энергоатомиздат, 1993.
3. Асинхронные двигатели серии 4А: Справ./ А.Э. Кравчик и др.- М.: Энергоиздат, 1982. – 504 с.
4. Радин В.И., Брускин Д.Э., Зорохович А.Е., Электрические машины: асинхронные машины. Под ред. И.П. Копылова. – М.: Энергоатомиздат, 1988.
5. Бурков А.Т. Электронная техника и преобразователи. - М. Транспорт, 1999.- 464 с.
6. Герман-Галкин С.Г. Компьютерное моделирование полупроводниковых систем. Matlab 6.0.- Санкт-Петербург: Корона принт, 2001.-320 с.
7. Ключев В.И. Теория электропривода. – М: Энергоатомиздат, 2001. –704 с.
Похожие работы


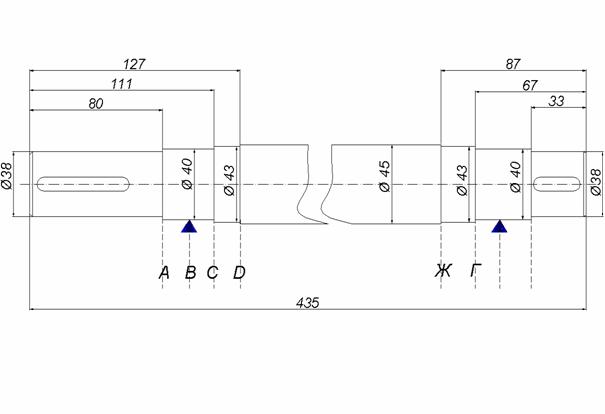
... валу предусматривается упорный буртик. Диаметр вала, см, в той его части, где размещается магнитопровод, предварительно можно выбрать по формуле: где – номинальная мощность, кВт; – номинальная частота вращения ротора, об/мин; – коэффициент, значение которого принимаем по рекомендациям [2, c. 231] равным . Тогда . По рекомендациям [3, с. 78] принимаем основные размеры: a=67,5 мм; ...
... геометрических параметров каната; - выбор схемы и способа крепления конца каната на барабане; - выбор подшипников и их проверочный расчет 2.2 Выбор схемы полиспаста Расчет механизма подъема груза начинают с выбора схемы полиспаста с учетом грузоподъемности и типа крана (по таблице 1 [1]). Для проектируемого крана грузоподъемностью Q = 10т m = 2 Рисунок 2.1 – Схема полиспаста крана ...
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
... на вале ротора, далее, посредством щеточного контакта, к обмотке ротора можно подключить пусковой реостат. В данном курсовом проекте речь пойдет о трехфазном асинхронном двигателе с короткозамкнутым ротором. 1. АНАЛИТИЧЕСКИЙ ОБЗОР 1.1 Современные серии электрических машин В 70-е годы была разработана и внедрена серия электродвигателей 4А, основным критерием при проектировании которой ...
0 комментариев