СТАТИЧЕСКАЯ ХАРАКТЕРИСТИКА
ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ. КАЧЕСТВО ПРОЦЕССА УПРАВЛЕНИЯ
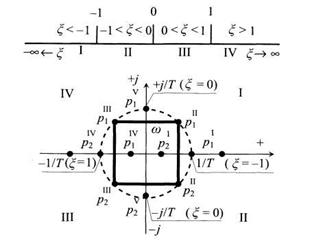
ОПРЕДЕЛЕНИЕ ПОКАЗАТЕЛЕЙ КАЧЕСТВА ПО РАСПОЛОЖЕНИЮ НУЛЕЙ И ПОЛЮСОВ ПЕРЕДАТОЧНОЙ ФУНКЦИИ В КОМПЛЕКСНОЙ ПЛОСКОСТИ
ЗАПАС УСТОЙЧИВОСТИ
ТРЕБОВАНИЯ К ОФОРМЛЕНИЮ РАБОТЫ
Содержание задания
Содержание задания
Передаточные функции элементов структурной схемы
Передаточные функции элементов структурной схемы
Навигация
Содержание задания
Теория автоматического управления
47347
знаков
19
таблиц
22
изображения
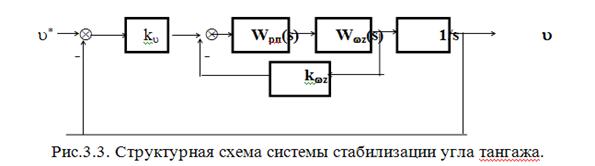
3. Содержание задания.
3.1. Составить структурную схему и найти эквивалентные передаточные функции САУ по воздействиям Dmс и DWзад.
3.2. Выбрать значение Кр.расч., при котором обеспечивается статизм регулирования Кс £ 0.05 (по возмущающему воздействию mс).
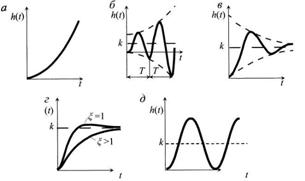
3.3. Рассчитать и построить переходные характеристики системы DW=f(t) при выбранном значении Кр=Кр.расч. и различных значениях К’ и К” (для входных воздействий Wзад = 1.0 и mс = 1.0.
Выбрать значения К’ = К’расч. и К” = К”расч., при которых переходные процессы имеют затухающий и, по возможности, монотонный (без перерегулирования) характер. Определить время переходного процесса tп и, при необходимости, перерегулирование g и колебательность G.
Значения К” целесообразно принимать в диапазоне
0.5 ТаТр
0< К’’ <-----------------
КаКр
3.4. Рассчитать и построить КЧХ, АЧХ, ФЧХ и ВЧХ системы в замкнутом состоянии, оценить частотные свойства и показатели качества регулирования (tп, g, G). Сравнить полученные значения показателей качества с соответствующими значениями пункта 3.3.
3.5. Определить показатели качества регулирования (tп, G) по расположению нулей и полюсов передаточной функции системы в комплексной плоскости и сравнить их с соответствующими значениями пунктов 3.3 и 3.4.
3.6. Рассчитать и построить область устойчивости системы в плоскости параметров Кр, К’ при К” = К”расч.
Окончательно выбрать значения Кр.расч. и К’расч.
3.7. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 3
1. Провести исследование системы автоматического регулирования активной мощности ГЭС.
2. Исходные данные.
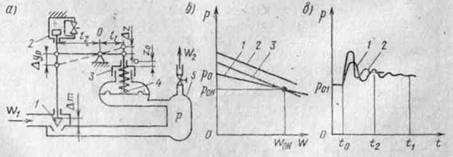
2.1. Структурная схема
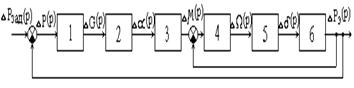
1- регулятор мощности;
2 - серводвигатель;
3 - гидравлическая турбина;
4 - звено, моделирующее изменение частоты вращения эквивалентного гидроагрегата от изменения момента;
5 - звено, моделирующее изменение угла Dd от изменения частоты вращения DW;
6 - звено, моделирующее изменение электрической мощности эквивалентного гидрогенератора от изменения угла Dd;
Рзад - задание по мощности, (о.е.);
Рэ - электрическая мощность эквивалентного гидрогенератора, (о.е.);
G - регулирующее воздействие на входе серводвигателя, (о.е.);
a - степень открытия направляющего аппарата, (о.е.);
m - момент на валу турбины, (о.е.);
W - угловая частота вращения, (о.е.);
d - угол между векторами ЭДС эквивалентного гидрогенератора ГЭС и эквивалентного генератора приемной энергетической системы.
2.2. Передаточные функции элементов структурной схемы
DG(p) Da(р) К’p + 1
W1(р) =-------- = Кр ; DР = DРзад - DРэ; W2(р) =-------- = ---------------;
DP(р) DG(p) Трр
Dm(p) 1 - a0Т0р DW(р) 1
W3(р) =----------- = ------------------- ; W 4(р) =--------------- = --------- ;
Da(р) 1 + 0.5a0Т0р Dm(p) Тар
Dd(р) 1 DРэ
W 5(р) = ----------- = ----------- ; W 6(р) = ----------- = К х + К ‘х P,
DW(p) Тdр Dd(р)
где Кр - коэффициент передачи регулятора мощности;
К’ - коэффициент передачи по скорости изменения мощности;
Тр - постоянная времени регулятора, (с);
a0 - исходная нагрузка эквивалентного гидроагрегата, (о.е.);
Т0 - постоянная времени водовода при номинальной частоте вращения, соответствующая номинальной нагрузке агрегата, (с);
Та - постоянная инерции эквивалентного гидроагрегата, отнесенная к базисной (номинальной) мощности, (с); Тd = 0.00318 с (при wном = 314 рад/с);
К х , К ‘х - коэффициенты передачи эквивалентного гидроагрегата.
2.3. Параметры элементов структурной схемы
| Параметры | Варианты | |||||||||
| 3.1 | 3.2 | 3.3 | 3.4 | 3.5 | 3.6 | 3.7 | 3.8 | 3.9 | 3.10 | |
| Т0,с | 2.0 | 2.0 | 1.0 | 2.0 | 1.0 | 1.0 | 3.0 | 2.0 | 1.0 | 2.0 |
| Та,с | 8.0 | 10 | 8.0 | 5.0 | 10 | 8.0 | 10 | 10 | 8.0 | 12 |
| Тр,с | 5.0 | 4.0 | 4.0 | 7.0 | 5.0 | 5.0 | 5.0 | 7.0 | 5.0 | 5.0 |
| Кх | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 |
| К’х | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
3. Содержание задания.
3.1. Рассчитать и построить переходную характеристику системы DРэ = f(t) для a0 = 1.0 и a0 = 0.1 (холостой ход) при DРзад = 1.0, Кр = Кр,расч. и различных значениях Кр и К’.
Выбрать значение Кр,расч и К’расч., при которых переходный процесс имеет затухающий и, по возможности, монотонный (без перерегулирования) характер.
3.2. Рассчитать и построить КЧХ, АЧХ и ФЧХ системы в замкнутом состоянии, оценить частотные свойства (при a0 = 1.0) и качество регулирования.
3.3. Определить показатели качества регулирования по расположению нулей и полюсов передаточной функции системы в комплексной плоскости.
3.4. Рассчитать и построить область устойчивости системы в плоскости параметров Кр и К’ приa0 = 1.0 и a0 = 0.1.
3.5. Определить запас устойчивости системы по модулю и фазе (по Найквисту).
Задание 4
1. Провести исследование системы автоматического регулирования частоты вращения турбоагрегата (без промежуточного перегрева пара), работающего на выделенную (изолированную) электрическую нагрузку.
2. Исходные данные.
2.1. Структурная схема
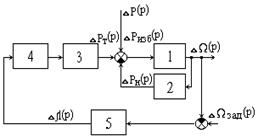
1-турбогенератор;
2 - звено, моделирующее регулирующий эффект электрической нагрузки;
3 - паровая турбина;
4 - гидравлический серводвигатель;
5 - регулятор частоты вращения;
W - угловая частота вращения, (о.е.);
Р - потребляемая электрическая мощность (нагрузки), (о.е.);
Рт - механическая мощность на валу турбины, (о.е.);
DРн - изменение мощности, обусловленное регулирующим эффектом нагрузки, (о.е.);
Н - степень открытия регулирующего клапана турбины, (о.е.);
l - регулирующее воздействие на выходе регулятора, (о.е.).
Похожие работы
... Вид характеристики зависит от свойств самого регулятора, характеристик ИО и ОР. Вопросы устойчивости, характеризующейся динамическими свойствами АСР, являются основными при изучении теории и эксплуатации средств автоматического регулирования. Определение температуры является одним из сложных и трудоемких процессов измерения, основанным на теплообмене между телами. Приборы, входящие в тепловой ...



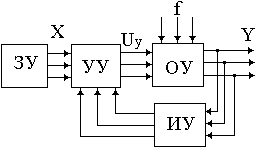
... поведение регулируемой величины. Управляющее воздействие вырабатывается устройством управления (УУ). Совокупность взаимодействующих управляющего устройства и управляемого объекта образует систему автоматического управления. Система автоматического управления (САУ) поддерживает или улучшает функционирование управляемого объекта. В ряде случаев вспомогательные для САУ операции (пуск, остановка, ...
... значениях функции. Начальное значение функции:. (2.10) Конечное значение функции: . (2.11) 7. Теорема запаздывания . (2.12) 4. Дифференциальные уравнения САУ При математическом описании систем автоматического управления составляют уравнения статики и динамики. Уравнения статики описывают установившиеся режимы и, как правило, являются алгебраическими. Уравнения динамики ...
... можно судить, если в пространстве изменяемых параметров построить область устойчивости, т.е. выделить область значений параметров, при которых система сохраняет устойчивость. Область устойчивости в теории автоматического управления принято называть D – областью, а представление области параметров в виде областей устойчивости и неустойчивости называют D – разбиением. Построение области ...
0 комментариев