Проверим реализуемость тактограммы
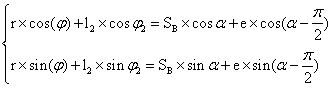
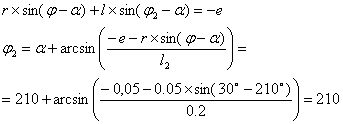
Составляем формулы включений и произведём их упрощение
Построим схему управления на пневматических элементах
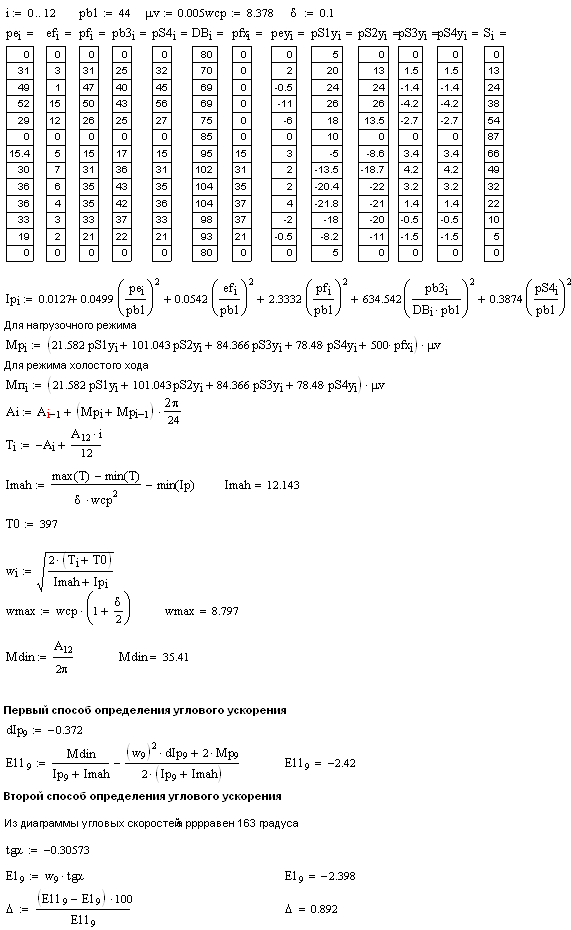
Определение цикла работы механизма
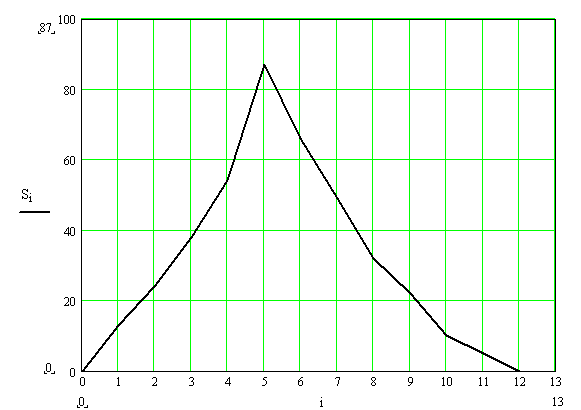
Определение сил давления газа для 12 положений каждого из поршней
Построение планов скоростей для каждого из 12 положений механизма
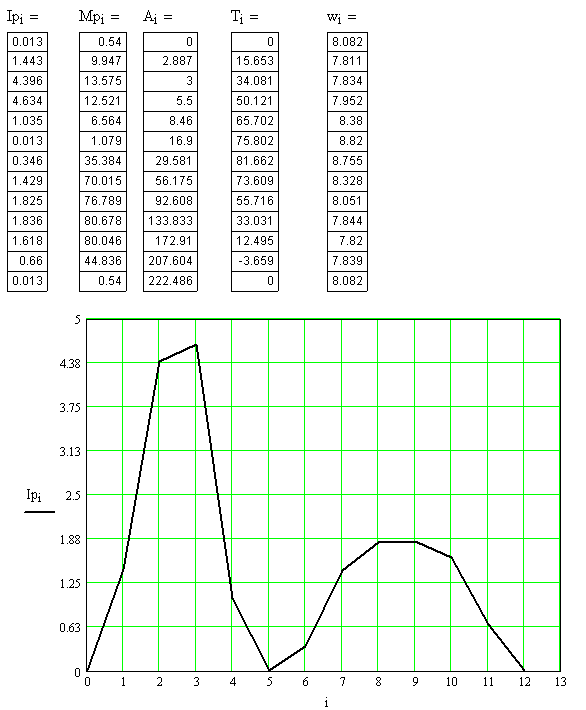
Вычисление приведённого момента движущих сил
Определение момента инерции маховика
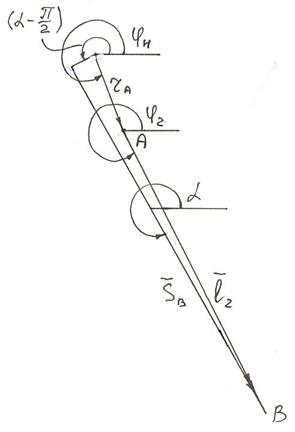
Сила инерции шатуна, направленная из точки S2 (центр масс шатуна) в противоположную сторону ускорения точки S2
Навигация
Построим схему управления на пневматических элементах
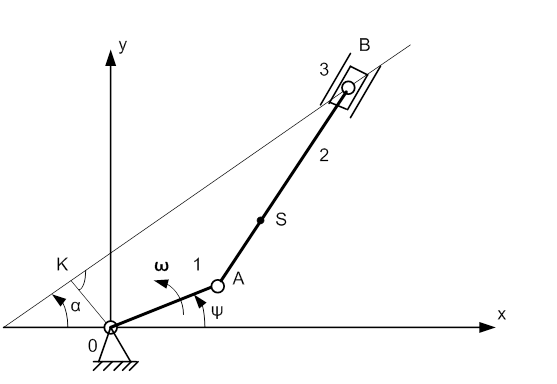
Динамический синтез и анализ рычажного механизма
25692
знака
11
таблиц
2
изображения
1.5 Построим схему управления на пневматических элементах
Построение схемы путевого управления на пневматических элементах начинаем со схематического изображения пневмоцилиндров, причем поршни всех трёх механизмов показываем в крайних левых положениях, которые соответствуют исходным (нижним) положениям на тактограмме. При этом штоки поршней нажимают на конечные выключатели ![]() . Каждый из этих выключателей представляет собой двухпозиционный трехлинейный распределитель, условное изображение которого состоит из двух квадратов, соответствующих двум возможным положениям (позициям) его подвижной части и трех линий (трубопроводов). Первая линия соединена с источником сжатого воздуха (напорная линия), вторая с - атмосферой, третья линия дает сигнал в управляющее устройство. Каналы (проходы) изображаем линиями со стрелками, показывающими направление потоков. Закрытый канал имеет поперечную черту. В нажатом положении у конечного выключателя атмосфера соединена с закрытым каналом, а сжатый воздух по открытому каналу поступает в управляющее устройство, т. е. дает сигнал (например,
. Каждый из этих выключателей представляет собой двухпозиционный трехлинейный распределитель, условное изображение которого состоит из двух квадратов, соответствующих двум возможным положениям (позициям) его подвижной части и трех линий (трубопроводов). Первая линия соединена с источником сжатого воздуха (напорная линия), вторая с - атмосферой, третья линия дает сигнал в управляющее устройство. Каналы (проходы) изображаем линиями со стрелками, показывающими направление потоков. Закрытый канал имеет поперечную черту. В нажатом положении у конечного выключателя атмосфера соединена с закрытым каналом, а сжатый воздух по открытому каналу поступает в управляющее устройство, т. е. дает сигнал (например, ![]() = 1).
= 1).
В тех же условных обозначениях вычерчиваем изображения двухпозиционных четырёхлинейных распределителей для каждого из пневмоцилиндров. Первая линия соединена с левым рабочим объемом цилиндра, вторая - с правым рабочим объемом цилиндра, третья - с атмосферой и четвертая - с источником сжатого воздуха, Так как все поршни занимают крайние левые положения, то каждый распределитель показываем в такой позиции, при которой сжатый воздух поступает в правый рабочий объем цилиндра. В другой позиции сжатый воздух поступает в левый рабочий объем цилиндра, т. е. перемещение подвижных частей распределителя справа налево вызывает прямой ход поршня. Это перемещение происходит под действием сжатого воздуха при поступлении сигнала ![]() .
.
Обратное перемещение происходит при поступлении сигнала ![]() , подаваемого с противоположной стороны. Указанный распределитель называется также двусторонним.
, подаваемого с противоположной стороны. Указанный распределитель называется также двусторонним.
После вычерчивания распределителей пунктиром намечаем прямоугольник, в котором располагаем блок управления. К верхней стороне прямоугольника подводим линии от конечных выключателей в следующем порядке: ![]() . Это будут входы блока управления. К нижней стороне прямоугольника подводим линии от распределителей:
. Это будут входы блока управления. К нижней стороне прямоугольника подводим линии от распределителей:![]() . Это будут выходы блока управления. Так как заданная тактограмма реализуема только при наличии памяти, то с левой стороны блока управления показываем логический элемент памяти в виде двустороннего четырёхлинейного распределителя, т. е. такого же распределителя, какой был применён для управления перемещениями поршней. Этот распределитель показываем в положении соответствующему началу первого такта, т. е. при включенной памяти. Две верхние линии от элемента памяти идут на вход блока управления и дают два дополнительных входа z и
. Это будут выходы блока управления. Так как заданная тактограмма реализуема только при наличии памяти, то с левой стороны блока управления показываем логический элемент памяти в виде двустороннего четырёхлинейного распределителя, т. е. такого же распределителя, какой был применён для управления перемещениями поршней. Этот распределитель показываем в положении соответствующему началу первого такта, т. е. при включенной памяти. Две верхние линии от элемента памяти идут на вход блока управления и дают два дополнительных входа z и ![]() . В указанном положении подаётся сигнал z =1, т. е. в этом положении память включена.
. В указанном положении подаётся сигнал z =1, т. е. в этом положении память включена.
Сигналы ![]() и
и![]() идут от выходов блока управления, т. е. к ранее показанным выходам блока управления добавляются еще два.
идут от выходов блока управления, т. е. к ранее показанным выходам блока управления добавляются еще два.
Соединяем входы и выходы блока управления так, чтобы их соединения соответствовали формулам включения. Выходы![]() прямо соединяем с входами
прямо соединяем с входами![]() ; выход
; выход ![]() соединяем через логический оператор умножения с входами
соединяем через логический оператор умножения с входами ![]() ,выход
,выход ![]() - с входами
- с входами ![]() .
.
В качестве операторов умножения используем реле УСЭППА (универсальная система элементов промышленной пневмоавтоматики).
2. Динамический синтез рычажного механизма по коэффициенту неравномерности движения
Параметры механизма
Размеры звеньев рычажного механизма
![]()
Частота вращения коленчатого вала и кулачка ![]()
Массы звеньев
![]()
![]()
Моменты инерции звеньев
![]()
![]()
Максимальное давление в цилиндре ![]()
Диаметр цилиндра ![]()
Коэффициент неравномерности вращения коленчатого вала ![]()
Положение кривошипа при силовом расчёте ![]()
Таблица 2.1. Циклограмма двигателя.
| Цилиндры | Обороты коленчатого вала | |||
| первый | Второй | |||
| Левый Правый | Всасывание Расширение | Сжатие Выпуск | Расширение Всасывание | Выпуск Сжатие |
Таблица 2.2. Зависимость давления газа в цилиндре двигателя от перемещения поршня (индикаторная диаграмма).
| Перемещение поршня (в долях Н),s/H | 0 | 0.025 | 0.05 | 0.1 | 0.2 | 0.3 | 0.4 | 0.5 | 0.6 | 0.7 | 0.8 | 0.9 | 1 | |
| Давление газа, | Всасывание | 0.01 | 0 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 | -0.01 |
| Сжатие | 0.29 | 0.23 | 0.20 | 0.16 | 0.10 | 0.06 | 0.04 | 0.03 | 0.014 | 0.007 | 0 | 0.005 | 0.01 | |
| Расширение | 0.29 | 1.0 | 0.9 | 0.7 | 0.5 | 0.36 | 0.29 | 0.24 | 0.19 | 0.17 | 0.14 | 0.12 | 0.05 | |
| выпуск | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.01 | 0.05 | |
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... B[44] = 220.000 TETA[44] = 0.0 R[45] = 52.000 B[45] = 220.000 TETA[45] = 0.0 R[46] = 52.000 B[46] = 360.000 TETA[46] = 0.0 6. Силовое исследование рычажного механизма. 6.1 Задачи силового исследования. При силовом исследовании решаются следующие задачи Определение сил действующих на звенья механизма. Определение реакций в кинематических ...
... 8-Планетарный механизм Исходные данные: n1=1570об/мин; n5=140об/мин; m=4мм; z4=15; z5=26. В данной задаче необходимо определить число зубьев 1,2,3 планетарной ступени механизма. Подобрать число сателлитов. 2.1.2 Определяем число зубьев планетарной ступени (1) (2) (3) (4) 2.1.3 Условие соосности (5) (6) Подставляем выражение (6) в передаточное отношение первого ...

... : Массы звеньев: Моменты инерции звеньев: После подстановки значений рассчитанных величин получим следующую формулу: 2.4.4 Расчет приведенных моментов сил На входное звено крышкоделательной машины при рабочем ходе действует сила полезного сопротивления P n.с.=500 H. Величину приведенного момента сил сопротивления определяем по формуле: Определим ...
0 комментариев