Проверим реализуемость тактограммы
Составляем формулы включений и произведём их упрощение
Построим схему управления на пневматических элементах
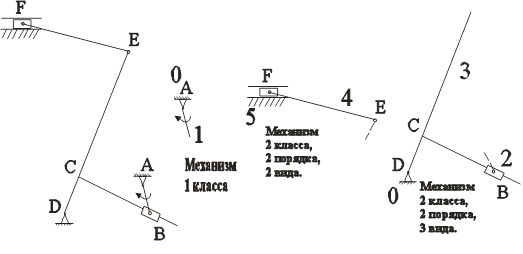
Определение цикла работы механизма
Определение сил давления газа для 12 положений каждого из поршней
Построение планов скоростей для каждого из 12 положений механизма
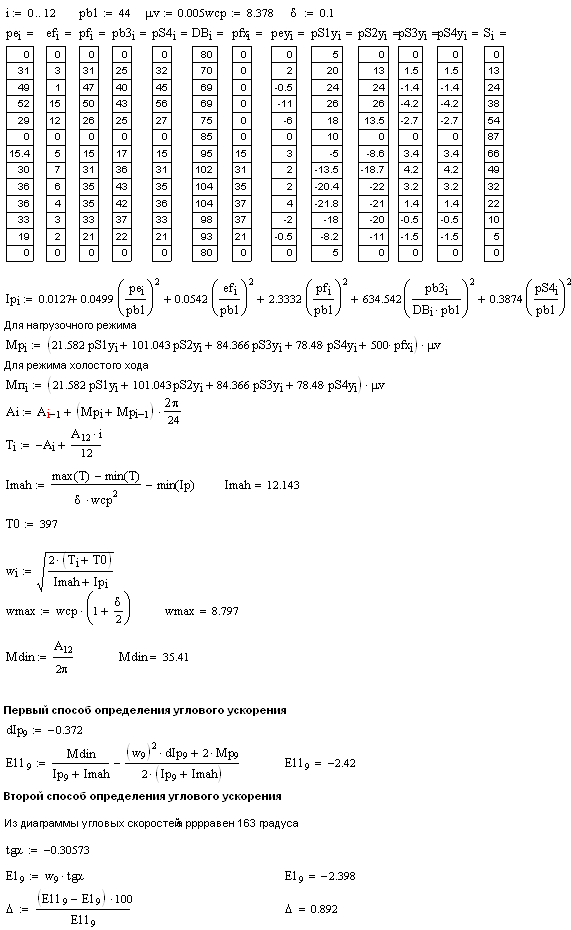
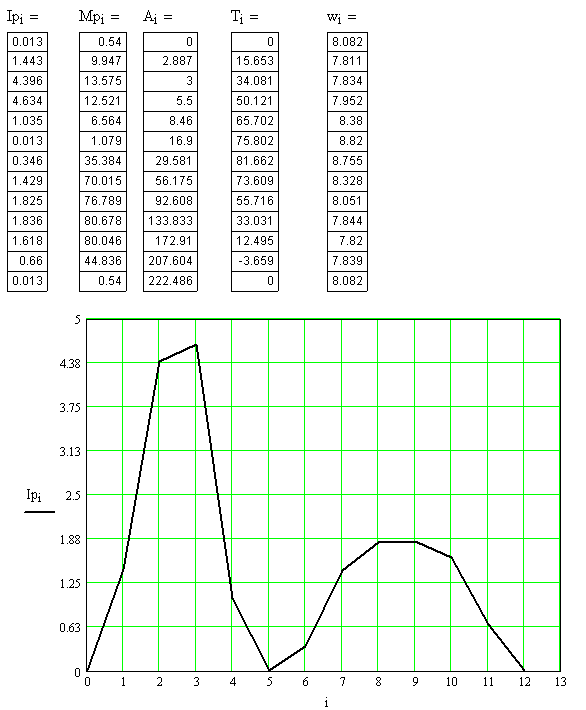
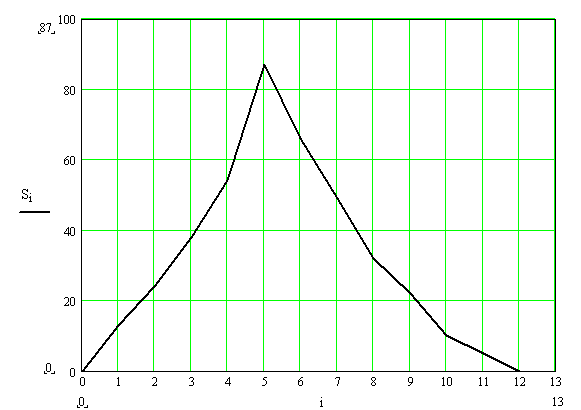
Вычисление приведённого момента движущих сил
Определение момента инерции маховика
Сила инерции шатуна, направленная из точки S2 (центр масс шатуна) в противоположную сторону ускорения точки S2
Навигация
Сила инерции шатуна, направленная из точки S2 (центр масс шатуна) в противоположную сторону ускорения точки S2
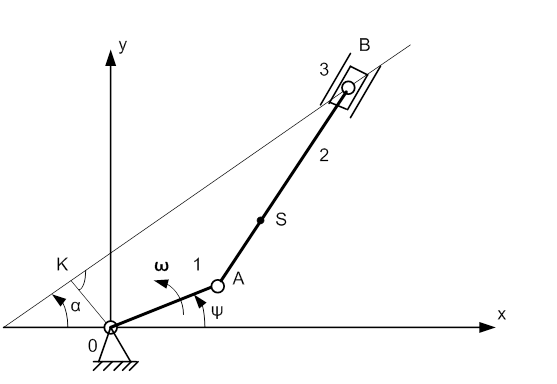
Динамический синтез и анализ рычажного механизма
25692
знака
11
таблиц
2
изображения
6. Сила инерции шатуна, направленная из точки S2 (центр масс шатуна) в противоположную сторону ускорения точки S2.
![]()
![]()
7. Момент инерции шатуна, направленный в противоположную сторону углового ускорения.

Удобно силу инерции и момент инерции приложенные к звену 2, заменить 1 силой смещённой относительно центра масс на расстояние ![]() , так чтобы в новом положении эта сила давала момент относительно центра масс того же направления, что и момент инерции.
, так чтобы в новом положении эта сила давала момент относительно центра масс того же направления, что и момент инерции.
![]()
Отложим от точки S2 отрезок равный ![]() перпендикулярно силе инерции звена 2 по её направлению. Из конца отрезка проведем перпендикулярную линию до пересечения с линией продления звена 2. Точку пересечения линий обозначим Т1, из неё проведём силу инерции звена 2.
перпендикулярно силе инерции звена 2 по её направлению. Из конца отрезка проведем перпендикулярную линию до пересечения с линией продления звена 2. Точку пересечения линий обозначим Т1, из неё проведём силу инерции звена 2.
8. Сила реакции 2 звена от 1 звена. Так как направление и величину мы не знаем разложим силу на две составляющие ![]() (направленная от точки А к точке В) и
(направленная от точки А к точке В) и![]() (направленная от точки А вниз перпендикулярно АВ).
(направленная от точки А вниз перпендикулярно АВ).
Силовой расчёт структурной группы 2-3.
Из условия равновесия: ![]()
Сумма моментов относительно точки В:
![]()
Из условия равновесия:

Графическое решение данного уравнения, выполненное в масштабе и представляющее собой замкнутый многоугольник, называется планом сил.
Неизвестные силы найдем с помощью построения плана сил.
Примем масштабный коэффициент плана сил, равный:
![]()
Теперь в масштабе переносим известные силы со структурной группы 2-3 на план сил в указанном порядке ![]() (силы
(силы ![]() на плане сил вычерчивать не будем, так как они имеют чертёжную величину менее 1 миллиметра). Из начала вектора
на плане сил вычерчивать не будем, так как они имеют чертёжную величину менее 1 миллиметра). Из начала вектора ![]() проводим линию параллельную силе
проводим линию параллельную силе ![]() , а из конца вектора
, а из конца вектора ![]() линию параллельную силе
линию параллельную силе ![]() . Точкой пересечения обозначатся вектора неизвестных сил, направленные по ходу обхода плана сил. Соединив начало вектора,
. Точкой пересечения обозначатся вектора неизвестных сил, направленные по ходу обхода плана сил. Соединив начало вектора, ![]() и конец вектора
и конец вектора ![]() найдем неизвестную силу
найдем неизвестную силу ![]() .
.
Аналогично структурной группе 2-3 вычерчиваем структурную группу 4-5 и определяем силы![]() и
и ![]() :
:

![]()
3.3 Определение силового момента приложенного к начальному звену при силовом расчёте
Вычертим начальное звено 1 с масштабным коэффициентом ![]()
В точке А приложить силу ![]() , в точке С приложить силу
, в точке С приложить силу ![]() .
.
В точке О обозначим силу ![]() направление и величину которой найдём из плана сил.
направление и величину которой найдём из плана сил.
![]()
Масштабный коэффициент принимаем:
![]()
Сила ![]() равна:
равна:
![]()
Также обозначим уравновешивающий момент, направленный в противоположную сторону действия сил ![]() и
и ![]() .
.
Из условия равновесия ![]()

![]()
3.4 Определение уравновешивающего момента с помощью рычага Жуковского
Рычаг Жуковского представляет собой повёрнутый против часовой стрелки на 90 градусов план скоростей, в соответствующие точки которого перенесены внешние силы. А в точке а приложена уравновешивающая сила ![]() , перпендикулярная отрезку ра.
, перпендикулярная отрезку ра.
Поворачиваем план скоростей на 90 градусов. В точках b и d обозначим силы ![]() ,
, ![]() и силы
и силы ![]() ,
, ![]() ; в точках S2 и S4 силы тяжести звеньев 2 и 4; точки
; в точках S2 и S4 силы тяжести звеньев 2 и 4; точки ![]() и
и![]() находим с помощью свойства подобия и из них чертим силы
находим с помощью свойства подобия и из них чертим силы ![]() и
и![]() .
.
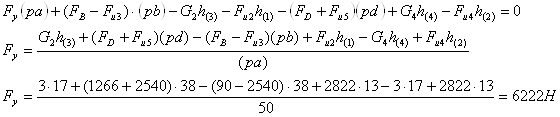
Из условия равновесия относительно полюса плана скоростей найдём силу![]() :
:
3.5 Сравним полученные величины уравновешивающего момента, полученные разными способами
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... B[44] = 220.000 TETA[44] = 0.0 R[45] = 52.000 B[45] = 220.000 TETA[45] = 0.0 R[46] = 52.000 B[46] = 360.000 TETA[46] = 0.0 6. Силовое исследование рычажного механизма. 6.1 Задачи силового исследования. При силовом исследовании решаются следующие задачи Определение сил действующих на звенья механизма. Определение реакций в кинематических ...
... 8-Планетарный механизм Исходные данные: n1=1570об/мин; n5=140об/мин; m=4мм; z4=15; z5=26. В данной задаче необходимо определить число зубьев 1,2,3 планетарной ступени механизма. Подобрать число сателлитов. 2.1.2 Определяем число зубьев планетарной ступени (1) (2) (3) (4) 2.1.3 Условие соосности (5) (6) Подставляем выражение (6) в передаточное отношение первого ...

... : Массы звеньев: Моменты инерции звеньев: После подстановки значений рассчитанных величин получим следующую формулу: 2.4.4 Расчет приведенных моментов сил На входное звено крышкоделательной машины при рабочем ходе действует сила полезного сопротивления P n.с.=500 H. Величину приведенного момента сил сопротивления определяем по формуле: Определим ...
0 комментариев