Навигация
1 нас. /c1п нас. +x¢2x нас. ) = 0,25(0,99/1,0175+1,19)=0,117; Mmax* = 2,39.
Кратности пускового и максимального моментов и пускового тока спроектированного двигателя удовлетворяют требованиям ГОСТ и технического задания на курсовой проект.
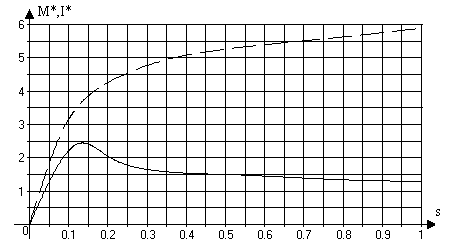
________ - M*= f (s)
__ __ __ - I*= f (s)
Рис.6. Пусковые характеристики асинхронного двигателя.
Сравним данные расчетного двигателя с данными двигателя-аналога:
|
3. Моделирование двигателя в среде MatLab Power System Blockset
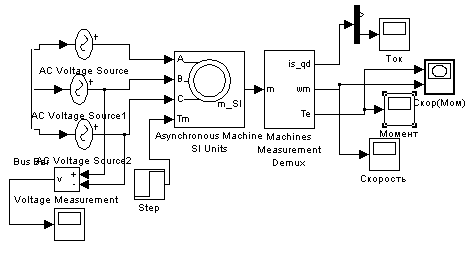
Рис.7. Схема пуска асинхронного двигателя с короткозамкнутым ротором в MatLab Power System Blockset.
3.1 Моделирование с параметрами номинального режима
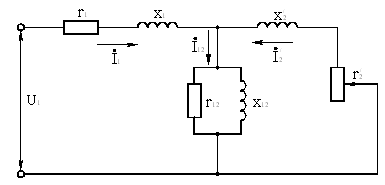
При моделировании с параметрами номинального режима в качестве сопротивлений асинхронного двигателя выставляем сопротивления, рассчитанные в п.2.6 и п.2.8:
| r1 | r2’ | x1 | x2’ | x12 |
| 0,498 | 0,23 | 1,12 | 1,4 | 42,16 |
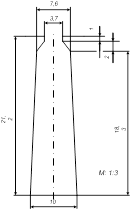
Вместо x1 подставляем L1 = x1/314 = 1.12/314 = 3.57 мГн.
Вместо x2’ - L2’ = x2/314 = 1,4/314 = 4,46 мГн.
Вместо x12 - L12 = x12/314 = 42.16/314 = 134.3 мГн.
При моделировании получены следующие результаты:

Рис.8. Зависимость угловой скорости от времени.
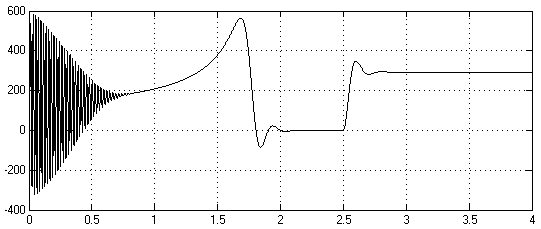
Рис.9. Зависимость момента от времени.

Рис.10. Зависимость тока статора от времени.
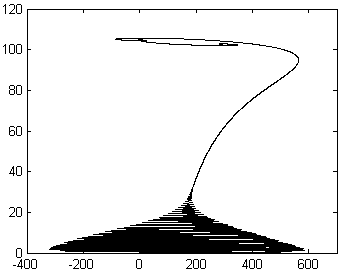
Рис.11. Механическая характеристика асинхронного двигателя.
Сравним при помощи рис.8 номинальное скольжение, полученное при моделировании, с расчетным.
sном.мод = (ωо- ωном)/ ωо = (104,72 – 102,7)/104,72 = 0,0193.
sном.расч = 0,0197.
Относительная погрешность: δs = (sном.расч - sном.мод)/ sном.расч = (0,0197 – 0,0193)/0,0197 =
= 0,02. δs = 2%.
По рис.9 найдем ток статора при холостом ходе и в номинальном режиме:
I1хх.max = 12,4 А Þ I1хх. = 12,4/1,414 = 8,77 А. I1хх.расч. = 8,82 А.
δIхх = (I1хх.расч. - I1хх.)/ I1хх.расч. = (8,82 – 8,77)/8,82 = 0,006. δIхх = 0,6%.
I1ном.max= 44,33 А Þ I1ном = 31,35 А. I1ном.расч. = 32,5 А.
δIном = (I1ном.расч. - I1ном.)/ I1ном.расч. = (32,5 – 31,35)/32,5 = 0,035. δIном = 3,5%.
3.2 Моделирование с параметрами пускового режима
При моделировании с параметрами пускового режима в качестве сопротивлений асинхронного двигателя выставляем сопротивления, рассчитанные в п.2.9:
| r1 | r2’ | x1 | x2’ | x12 |
| 0,498 | 0,39 | 0,88 | 0,902 | 56,07 |
Вместо x1 подставляем L1 = x1/314 = 0,88/314 = 2,8 мГн.
Вместо x2’ - L2’ = x2/314 = 0,902/314 = 2,87 мГн.
Вместо x12 - L12 = x12/314 = 56,07/314 = 178,6 мГн.
При моделировании получены следующие результаты:
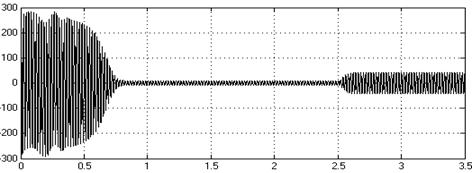
Рис.12. Зависимость пускового тока статора от времени
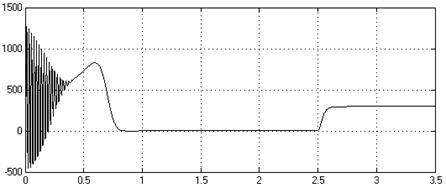
Рис.13. Зависимость пускового момента от времени.
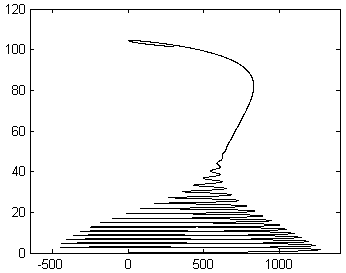
Рис.14. Пусковая механическая характеристика асинхронного двигателя.
По рис.12 имеем: I1п.max = 285 А Þ I1п. = 201,5.
Iп*= ![]() = 6,2. Iп.расч*= 5,91.
= 6,2. Iп.расч*= 5,91.
δIп = (I1п..расч* - I1п*)/ I1п.расч* = (6,2 – 5,91)/5,91 = 0,049. δIп = 4,9%.
По рис.13 имеем: Мп. = (1270,5 - 451)/2 = 40,75 Н*м.
Мп*= ![]() = 1,4. Мп.расч*= 1,29.
= 1,4. Мп.расч*= 1,29.
δМп = (Мп..расч* - Мп*)/ Мп.расч* = (1,4 – 1,29)/1,29 = 0,085. δIп = 8,5%.
|
Похожие работы
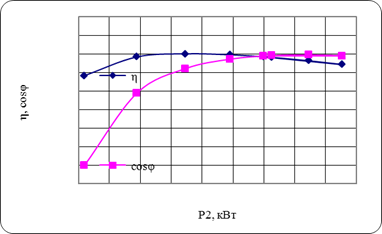
... 2,54 2,45 2,59 Графики пусковых характеристик спроектированного двигателя с короткозамкнутым ротором изображены на рисунке 6 и рисунке 7. Рисунок 6 – Зависимость Рисунок 7 – Зависимость Спроектированный асинхронный двигатель удовлетворяет требованиям ГОСТ как по энергетическим показателям (КПД и ), так и по пусковым характеристикам. 9. ТЕПЛОВОЙ РАСЧЁТ Превышение температуры ...
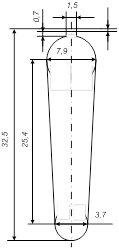
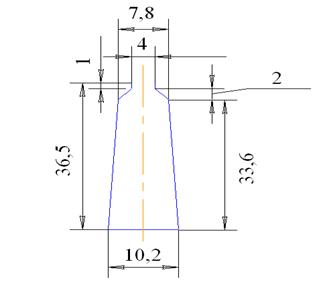
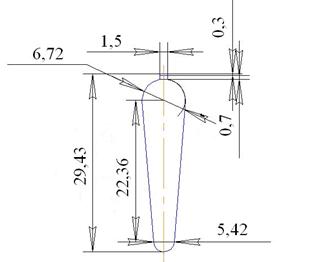
... (4.10) Рассчитаем полную высоту паза ротора hП2: (4.11) Уточним площадь сечения стержня : (4.12) 4.10 Определим плотность тока в стержне J2: (4.13) Рисунок 4.1. Паз спроектированного двигателя с короткозамкнутым ротором 4.11 Рассчитаем площадь сечения короткозамыкающих колец qкл: , (4.14) где - ток в кольце, определим по формуле: , (4.15) где , тогда ...
... других затрат. На ремонт и обслуживание асинхронных двигателей в эксплуатации средства составляют более 5 % затрат из обслуживания всего установленного оборудования. Поэтому создание серии высокоэкономических и надежных асинхронных двигателей являются важнейшей народно – хозяйственной задачей, а правильный выбор двигателей, их эксплуатации и высококачественный ремонт играют первоочередную роль в ...
... из строя эл. двигателя. вспомо- гатель-ная. Защитные крышки, кожухи, эмали, лаки. Конструк- ционные материалы, краски, лаки, эмали. Таблица 7.1. СФА АД Система асинхронного двигателя для структурно-функционального анализа представлена на рис. 7.2. Рис. 7.2. Схема для СФА Матрица механической связи основных элементов структуры асинхронного электродвигателя приведена ниже в ...
0 комментариев