Простейшие свойства решений системы (I)
Геометрическая интерпретация динамической системы на фазовой плоскости (х, у)
Разбиение области в фазовой плоскости на траектории
Направление на траектории. Изменение параметризации
Терминология и обозначения
Теорема о непрерывной зависимости от начальных значений
Замена переменных
Изоклины
Примеры
Навигация
Простейшие свойства решений системы (I)
Динамические системы в плоской области
75588
знаков
0
таблиц
20
изображений
3. Простейшие свойства решений системы (I)
Мы установим некоторые cвойства решений системы (I), являющиеся следствием автономности этой системы.
Лемма 1. Если ![]()
есть решение системы (I), определенное на интервале (![]() , Т), то
, Т), то
![]() (2)
(2)
где С — любая постоянная, также есть решение системы (I) и это решение определено на интервале (![]() — С, Т — С).
— С, Т — С).
Доказательство. Так как (1) есть решение системы (I), то при всех t ![]() (
(![]() , Т) имеет место тождественное равенство
, Т) имеет место тождественное равенство
![]() (
(![]() ),
), ![]() .
.
Если заменить в этих равенствах t на t+C, то при всех t![]() (
(![]() —С,Т — С) мы будем иметь тождественное равенство
—С,Т — С) мы будем иметь тождественное равенство
![]()
![]() (3)
(3)
Но, очевидно
![]() ,
, ![]()
и, следовательно, равенства (3) могут быть записаны в виде
![]()
![]()
Последние равенства показывают, что функции (2) являются решением системы (I). Тот факт, что это решение определено на интервале (![]() — С, Т — С), устанавливается простым рассуждением, которое мы опускаем. Лемма доказана.
— С, Т — С), устанавливается простым рассуждением, которое мы опускаем. Лемма доказана.
С точки зрения геометрической интерпретации в трехмерном пространстве утверждение леммы 1 означает, что линия, получающаяся из любой интегральной кривой путем сдвига ее вдоль оси t на любой отрезок, также есть интегральная кривая. В самом деле, интегральная кривая
![]()
получается из интегральной кривой
![]()
сдвигом вдоль оси t на величину С.
Лемма 2.
а) Решения системы (I)
![]() (1)
(1)
и ![]() (2)
(2)
можно рассматривать как решения, удовлетворяющие начальным условиям с одинаковыми начальными значениями х0 и у0 и различными начальными значениями переменного t.
б) Два решения, удовлетворяющие начальным условиям с одинаковыми начальными значениями переменных х0, у0 и различными начальными значениями t,могут быть получены одно из другого заменой t на ![]() с надлежащим выбором постоянной С.
с надлежащим выбором постоянной С.
Доказательство. Если решение (1) соответствует начальным значениям t0, x0, у0 так, что
![]() (3)
(3)
то в силу очевидных равенств
![]() (t0—С + С) =
(t0—С + С) = ![]() (t0) = x0 ψ (t0—С + С) = ψ (t0) = y0
(t0) = x0 ψ (t0—С + С) = ψ (t0) = y0
решение (2) соответствует начальным значениям t0—С, х0, у0, что и доказывает утверждение а).
Далее, рассмотрим наряду с решением (1), соответствующим начальным значениям t0, x0, у0, решение
![]() (4)
(4)
соответствующее начальным значениям ![]() , x0, у0, где
, x0, у0, где ![]() t0. Если в решении
t0. Если в решении
(2) ![]()
величину С взять равной t0—![]() , то оно, очевидно, будет соответствовать тем же начальным значениям
, то оно, очевидно, будет соответствовать тем же начальным значениям ![]() , x0, у0, что и решение (4). В силу единственности решения, удовлетворяющего данным начальным условиям, отсюда следует
, x0, у0, что и решение (4). В силу единственности решения, удовлетворяющего данным начальным условиям, отсюда следует
![]() ,
, ![]()
что и доказывает утверждение б) леммы.
В дальнейшем, рассматривая наряду с решением (1) решение (2), мы будем часто говорить, что рассматриваются решения, отличающиеся выбором начального значения t. Решение всякой системы двух дифференциальных уравнении, соответствующее любым произвольным начальным значениям t0, х0, у0 , очевидно, является функцией t, t0, х0, у0 , т. е. записывается в виде
х = Ф(t, t0, х0, г/о), y= Ψ (t, t0, х0, у0) (5)
При этом по самому смыслу функций Ф (t, t0, х0, у0) и Ψ (t, t0, x0, у0), Ф(t0, t0, х0, у0) = х0, Ψ (t0, t0, х0, у0)= у0
Однако в случае системы (1), вследствие автономности этой системы, функции (5) являются по существу не функциями переменных t и t0, а функциями разности t—t0. Это устанавливается в следующей лемме:
Лемма 3. Решение системы (I) как функции от t и от начальных значений t0 , x0 , у0 ,может быть записано в виде
x = ![]() (t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (6)
(t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (6)
Доказательство. Рассмотрим наряду с решением (5) решение
х = Ф(t, 0, х0, у0), y =Ψ (t, 0, х0, у0),
удовлетворяющие начальным условиям: при t=0, х=х0, у=у0
В силу леммы 1 функции
x = Ф (t — t0, 0, х0, у0), y =Ψ (t— t0 ,0, х0 ,у0) (7)
также являются решением системы (I). Решения (5) и (7) соответствуют одним и тем же начальным значениям t0, x0, у0 . Но тогда эти решения совпадают, т. е.
Ф (t ,t0 , х0, у0)= Ф (t — t0, 0, х0, у0)
Ψ (t , t0, х0 ,у0)= Ψ (t— t0 ,0, х0 ,у0)
Введение обозначений
Ф (t — t0, 0, х0, у0)=![]() (t—t0 , х0 , у0),
(t—t0 , х0 , у0),
Ψ (t— t0 ,0, х0 ,у0)= ψ(t —t0, х0, у0)
устанавливает справедливость утверждения леммы.
В дальнейшем решение системы (I), соответствующее начальным значениям t0, х0, у0, мы всегда будем записывать в виде (6).
Лемма 4. Если решение
x = ![]() (t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (8)
(t—t0 , х0 , у0), y = ψ(t —t0, х0, у0). (8)
определено при значении t = t1 , и
 (9) то
(9) то
![]() (t—t0 , х0 , у0)
(t—t0 , х0 , у0) ![]() (t —t1, х0, у0)
(t —t1, х0, у0)
ψ(t—t0 , х0 , у0) ![]() (t —t1, х0, у0) (10)
(t —t1, х0, у0) (10)
Доказательство. Из соотношений (9), очевидно, следует, что решение (8) и решение
x =![]() (t —t1, х0, у0), y=
(t —t1, х0, у0), y= ![]() (t —t1, х0, у0)
(t —t1, х0, у0)
являются решениями, соответствующими одним и тем же начальным значениям t1 , х1 , y1. Но тогда эти решения совпадают, т. е. имеют место равенства (10).
Замечание. Полагая в тождествах (10) t = t0, мы получим
x0 = ![]() (t0
(t0![]() t1 , х1 , у1) , y0 = ψ(t0
t1 , х1 , у1) , y0 = ψ(t0![]() t1 , х1 , у1)
t1 , х1 , у1)
Это, очевидно, справедливо при любых t1 , х1 , у1 удовлетворяющих соотношениям (10). Опуская индексы, мы получаем
x0 =![]() (t0—t, х, у) , y0 = ψ(t0—t, х, у).
(t0—t, х, у) , y0 = ψ(t0—t, х, у).
Лемма 5. Если система (I) является системой класса Сn , тo функции
x0 =![]() (t—t0 , х0 , у0) , y0 = ψ (t—t0 , х0 , у0)
(t—t0 , х0 , у0) , y0 = ψ (t—t0 , х0 , у0)
при всех значениях, входящих в них переменных, при которых эти функции определены, имеют непрерывные (по совокупности всех переменных) частные производные:
1) по t (или t0) до порядка n+1 включительно,
2) по х0 и у0 до порядка n включительно
3). пo t (или t0) и по х0 и у0—содержащие по крайней мере одно дифференцирование по t (или t0)—до порядка n + 1
Похожие работы
... для реализации системы бюджетирования Консультационной группы "Воронов и Максимов". Статья о проблемах выбора системы бюджетирования - в проекте "УПРАВЛЕНИЕ 3000". Бюджетный автомат Если вы решитесь на автоматизацию системы бюджетирования компании, перед вами сразу встанут вопросы: что выбрать, сколько платить, как внедрять. Примеряйте! О ЧЕМ РЕЧЬ В “Капитале” на стр. 44, 45 мы рассказали ...
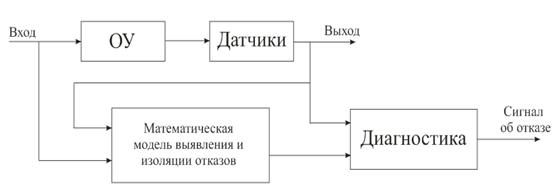

... сети могут быть использованы как классификаторы для разделения образцов рассогласований и формирования сигналов тревог. Таким образом, они могут выявлять и изолировать отказы. 3. Диагностика отказов системы регулирования уровня жидкости в баке 3.1. Постановка задачи Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе ...
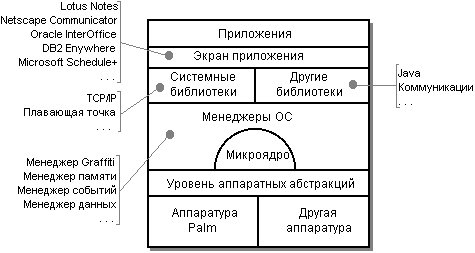
... их интеграция, расширение их возможностей в новых версиях, создание новых средств и перенос их на другие аппаратные платформы и в другие ОС IBM. 12.4 Операционная система z/VM ОС z/VM [21, 24, 42] (последняя версия - V4R2) является высокопроизводительной многопользовательской интерактивной ОС, предоставляющей уникальные возможности в части выполнения различных операционных сред на одном ...
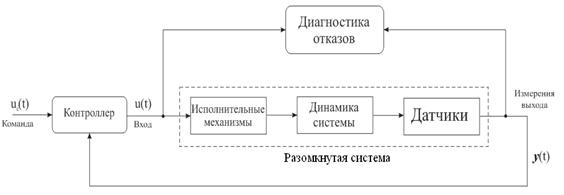
... , может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов. ...
0 комментариев