Простейшие свойства решений системы (I)
Геометрическая интерпретация динамической системы на фазовой плоскости (х, у)
Разбиение области в фазовой плоскости на траектории
Направление на траектории. Изменение параметризации
Терминология и обозначения
Теорема о непрерывной зависимости от начальных значений
Замена переменных
Изоклины
Примеры
Навигация
Направление на траектории. Изменение параметризации
Динамические системы в плоской области
75588
знаков
0
таблиц
20
изображений
7. Направление на траектории. Изменение параметризации
Пусть L — траектория системы (I) и
х = ![]() (t), y =
(t), y = ![]() (t)
(t)
— какое-нибудь соответствующее ей решение.
Мы введем на траектории L определенное направление в качестве положительного. Именно, будем считать положительным направлением на L направление в сторону возрастания t. При таком определении можно сказать, что положительное направление в каждой точке траектории L совпадает с направлением вектора, заданного в этой точке системой (I).
Пользуясь «кинематической» интерпретацией, можно сказать, что положительное направление на L есть то направление, в котором точка с координатами х = ![]() (t), y =
(t), y = ![]() (t) движется по траектории при возрастании t и при котором направление ее скорости в каждой точке совпадает с направлением фазовой скорости.
(t) движется по траектории при возрастании t и при котором направление ее скорости в каждой точке совпадает с направлением фазовой скорости.
Введенное таким образом положительное направление на L не зависит от того, какое из решений, соответствующих траектории L, мы возьмем (так как все такие решения получаются одно из другого заменой t на ![]()
В дальнейшем мы будем обычно опускать слово «положительное», т. е. под направлением на траектории L системы (I) мы будем подразумевать положительное направление, определяемое (или, как говорят, индуцируемое) на L этой системой.
Рассмотрим наряду с системой (I) систему
![]() (I')
(I')
Векторное поле системы (I') получается из векторного поля системы (I), если изменить направление каждого вектора на противоположное (не меняя длин векторов).
Непосредственной проверкой устанавливается, что каждому решению
х = ![]() (t), y =
(t), y = ![]() (t) (23)
(t) (23)
системы (I) соответствует решение
х = ![]() (-t), y =
(-t), y = ![]() (-t) (24)
(-t) (24)
системы (I'). Отсюда очевидно, что системы (I) и (1') имеют одинаковые траектории, но индуцируют на траекториях противоположные направления. Таким образом, переход от системы (I) к системе (I') можно рассматривать, как изменение параметризации на траекториях, именно, как замену параметра t параметром —t.
Рассмотрим более общий случай изменения параметризации на траекториях системы (1). Пусть f (х, у) — функция класса C1 , заданная в области G. Предположим, что функция f(х, у) отлична от нуля во всех точках области G, отличных от состояний равновесия системы (1), и имеет в них один и тот же знак.
Рассмотрим наряду с системой (I) систему
![]() (I*)
(I*)
В силу предположений, сделанных относительно функции f(х, у), очевидно, что состояния равновесия системы (I) совпадают с состояниями равновесия системы (I*).
Лемма 8. Если
х = ![]() (t), y =
(t), y = ![]() (t) (25)
(t) (25)
есть решение системы (I), причем соответствующая ему траектория отлична от состояния равновесия, то существует монотонная функция класса C1 (t) =![]() (s) такая, что пара функций
(s) такая, что пара функций
![]() (26)
(26)
является решением системы (I*).
Доказательство. Задавая какое-нибудь начальное значение t0, t0![]() (
(![]() , Т), где (
, Т), где (![]() , Т) — интервал определения решения (25), и произвольное s0, рассмотрим следующую функцию s(t)
, Т) — интервал определения решения (25), и произвольное s0, рассмотрим следующую функцию s(t)
Так как f(х, у) не обращается в нуль в точках, отличных от состояний равновесия, то s(t) является монотонной функцией класса С1 , определенной на интервале (![]() , Т). Очевидно, существует обратная функция
, Т). Очевидно, существует обратная функция
![]() (s), определенная в некотором интервале (
(s), определенная в некотором интервале (![]() S), также класса С1 , монотонная. Очевидно,
S), также класса С1 , монотонная. Очевидно,
![]()
Поэтому
![]() (27)
(27)

Последние соотношения показывают, что функции (26) являются решением системы (I*). Нетрудно видеть, что (![]() S), является максимальным интервалом определения решения (26), так как в противном случае интервал (
S), является максимальным интервалом определения решения (26), так как в противном случае интервал (![]() , Т) не был бы максимальным для решения (25). Лемма доказана.
, Т) не был бы максимальным для решения (25). Лемма доказана.
Уравнения (25) и (26) являются, очевидно, различными параметрическими уравнениями одной и той же траектории. Поэтому из леммы 8 следует, что динамические системы (I) и (I*) имеют одни и те же траектории, но с различными параметризациями на них. При переходе от системы (I) к системе (I*) направления на траекториях остаются неизменными, если f(х, у) > 0, и меняются, если F(x,y)<0.
Предположим теперь, что функция f(х, у) может обращаться в нуль в точках, отличных от состояний равновесия системы (I), а также может менять знак в области G. Рассмотрим снова систему (I*). Очевидно, состояниями равновесия системы (I*) являются все состояния равновесия системы (I), а также все точки области G, которые не являются состояниями равновесия системы (1), но в которых f(х, у) = 0.
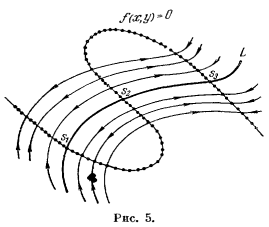
Кривая f(х, у) = 0 называется особой линией системы (I*) (каждая точка этой кривой является состоянием равновесия системы (I*)).
Рассмотрим теперь траекторию L системы (I), отличную от состояния равновесия. Если на траектории L функция f(х, у)![]() 0, то так же, как и выше, L является траекторией системы (I*) с измененной, вообще говоря, параметризацией.
0, то так же, как и выше, L является траекторией системы (I*) с измененной, вообще говоря, параметризацией.
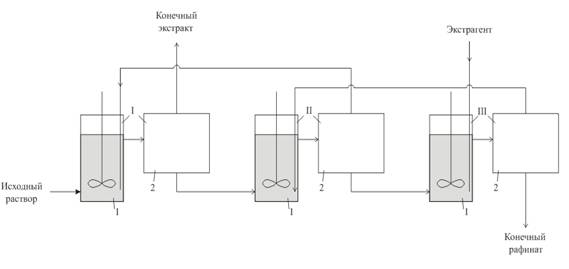
Если же на траектории L имеются точки кривой f(х, у) = 0, то все точки L, отличные от этих точек, распадаются, как легко видеть, на конечное или счетное число гладких кривых, являющихся траекториями системы (I*) (рис. 5). Направление на каждой такой траектории совпадает с направлением на L, если на этой траектории f(х, у) > 0, и не совпадает в противном случае.
Таким образом, каждая траектория системы (I) либо является траекторией системы (I*), либо состоит из конечного или бесконечного множества траекторий системы (I*) .
В дальнейшем, в ряде предложений и в примерах мы неоднократно будем встречаться с динамическими системами вида
![]() (
(![]() )
)
где Р (х, у), Q (х, у) — функции класса CN (![]() > 1) или аналитические, f(х, y) — функция класса CN или аналитическая, которая может обращаться в нуль в области G (в которой рассматривается система). Очевидно, в точках, где (х, у) = 0, правые части рассматриваемой системы (I **) не определены. Однако при указанном виде правых частей можно путем замены параметра t привести рассмотрение системы (I**) к рассмотрению системы вида (I).
> 1) или аналитические, f(х, y) — функция класса CN или аналитическая, которая может обращаться в нуль в области G (в которой рассматривается система). Очевидно, в точках, где (х, у) = 0, правые части рассматриваемой системы (I **) не определены. Однако при указанном виде правых частей можно путем замены параметра t привести рассмотрение системы (I**) к рассмотрению системы вида (I).
Действительно, полагая при х и у, необращающих в нуль f(х, у), dt =f(х, у) d![]() , мы получаем систему
, мы получаем систему
![]() (I***)
(I***)
Эту же систему мы будем рассматривать при х и у, обращающих в нуль функцию f(х, у) (что соответствует доопределению по непрерывности), так что система (I***) будет определена во всей области G. Очевидно, во всякой части области G, в которой f(х, у) не обращается в нуль, траектории системы (I**) и (I***) совпадают как точечные множества, однако, параметры на них различны. При этом там, где f(х, у) > 0, направление по ![]() совпадает с направлением по t, а там, где f(х, у) < 0 — противоположно ему. Точки с координатами х и у, обращающими в нуль функцию f(х, у), в которых правые части системы (I**) не определены, естественно выделять и считать не принадлежащими траекториям системы (I**) (к таким точкам, как нетрудно убедиться на простых примерах, точка по траектории может стремиться при t, стремящемся к конечному значению).
совпадает с направлением по t, а там, где f(х, у) < 0 — противоположно ему. Точки с координатами х и у, обращающими в нуль функцию f(х, у), в которых правые части системы (I**) не определены, естественно выделять и считать не принадлежащими траекториям системы (I**) (к таким точкам, как нетрудно убедиться на простых примерах, точка по траектории может стремиться при t, стремящемся к конечному значению).
Похожие работы
... для реализации системы бюджетирования Консультационной группы "Воронов и Максимов". Статья о проблемах выбора системы бюджетирования - в проекте "УПРАВЛЕНИЕ 3000". Бюджетный автомат Если вы решитесь на автоматизацию системы бюджетирования компании, перед вами сразу встанут вопросы: что выбрать, сколько платить, как внедрять. Примеряйте! О ЧЕМ РЕЧЬ В “Капитале” на стр. 44, 45 мы рассказали ...
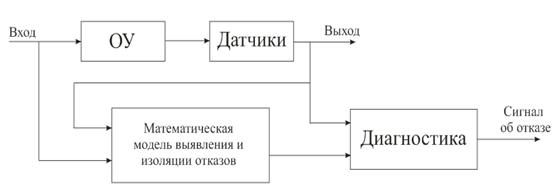
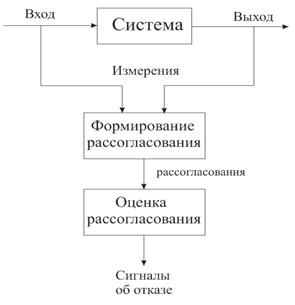

... сети могут быть использованы как классификаторы для разделения образцов рассогласований и формирования сигналов тревог. Таким образом, они могут выявлять и изолировать отказы. 3. Диагностика отказов системы регулирования уровня жидкости в баке 3.1. Постановка задачи Реализацию описанного выше метода диагностики отказов, основанного на моделях будем выполнять применительно к системе ...
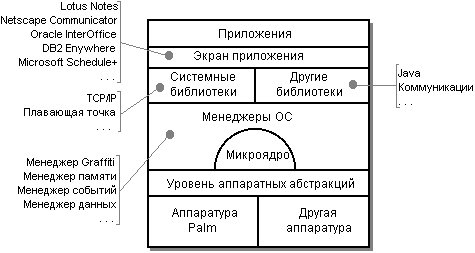
... их интеграция, расширение их возможностей в новых версиях, создание новых средств и перенос их на другие аппаратные платформы и в другие ОС IBM. 12.4 Операционная система z/VM ОС z/VM [21, 24, 42] (последняя версия - V4R2) является высокопроизводительной многопользовательской интерактивной ОС, предоставляющей уникальные возможности в части выполнения различных операционных сред на одном ...
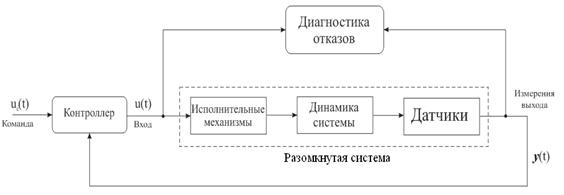
... , может приводить к большим потерям рабочего тела и раскрутке космического аппарата до недопустимых угловых скоростей. Таким образом разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата – является актуальной задачей. В настоящей работе решается задача построения алгоритмов контроля и идентификации отказов командных приборов и исполнительных органов. ...
0 комментариев