Навигация
Кинематический и силовой расчёт механизма. Определение осевого момента инерции маховика. Проектирование профиля кулачкового механизма. Проектирование зубчатого зацепления. Проектирование планетарного механизма
22720
знаков
5
таблиц
10
изображений
Зміст
Вступ 3
1.дКінематичне і силове дослідження механізму 4
1.1 Вихідні данн 4
1.2 Структурний аналіз механізму 5
1.3 Побудова положень механізму 6
1.4 Визначаємо швидкість точок і кутову швидкість ланок 6
1.5 Визначення прискорення точок та кутове прискорення ланок 8
1.6 Силовий розрахунок 11
2.дВизначення осьового моменту інерції маховика 18
2.1 Вихідні данні 18
2.2 Визначення сили Q 18
2.3 Визначення привідного моменту 19
2.4 Побудова графіків Мпр=ƒ(φ), AQ= ƒ(φ), Ap= ƒ(φ), ΔE= ƒ(φ) 19
2.5 Побудова графіка Jпр=ƒ(φ) 20
2.6 Побудова діаграми енергомас 22
3. Проектування профілю кулачкового механізму 23
3.1 Вихідні данні 23
3.2 Визначення закону руху штовхача 23
3.3 Знаходження мінімального радіуса кулачка 25
3.4 Проектування профілю кулачка 27
4. Проектування зубчатого зачеплення 29
4.1 Вихідніданні 29
4.3 Проектування зачеплення 31
4.4 Визначаємо величини параметрів якості 33
4.5 Проектування планетарної передачі 33
4.5.1 Вихідні данні 33
4.5.2 Розрахунок параметрів планетарної передачі 34
4.5.3 Побудова планів лінійних і кутових швидкостей 35
5. Використана література 37
Вступ Розвиток сучасної науки та техніки нерозривно зв’язан з бідуванням нових машин, підвищуванням продуктивності та полегшуванням праці людей, а також забезпечують засоби дослідження законів природи та життя людини.
З розвитком сучасної науки та техніки все ширше використовуються системи машин автоматичної дії. Сукупність машин-автоматів, з’єднаних між собою та призначених для здійснення певного технологічного процесу називається автоматичною лінією.
В теорії механізмів вивчаються загальні методи дослідження властивостей механізмів та проектування їх схеми незалежно від конкретного призначення машини, приладу та апарата.
В теорії машин розглядаються загальні методи проектування машин. Обидві частини теорії механізмів і машин невід’ємно зв’язані між собою, так як механізми складають основу майже кожної машини.
При вивченні загальних властивостей механізмів необхідно виділити найбільш суттєві загальні ознаки механізмів, відвертаючись від приватних ознак, належних конкретному механізму. Наприклад, при вивченні кінематичних властивостей механізмів достатнього мати його схему, складаючу відомості, необхідні для визначення кінематичних характеристик : переміщення, швидкості, прискорення.
Задачі теорії машин та механізмів дуже різноманітні, але важливості з них можна розподілити по трьом розділам:
- аналіз механізмів;
- синтез механізмів;
- теорія машин-автоматів.
Аналіз механізмів становить дослідження кінематичних і динамічних властивостей механізму по заданій схемі, а синтез механізму в проектуванні схеми механізму по заданим його властивостям
1.дКінематичне і силове дослідження механізму.
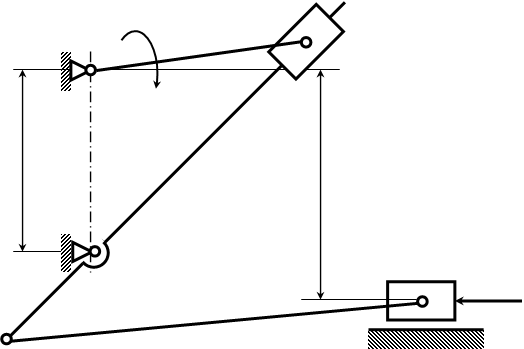
1.1 Вихідні данні. Транспортер (мал. 1) Таблиця №1| Довжина ланок | ω1 | Маса ланок | ||||||
| О1А | О2В | ВС | О1А | пол.А | ВА | ВС | пол.С | |
| мм | мм | мм | 1/с | кг | кг | кг | кг | кг |
| 45 | 50 | 160 | 80 | 0,22 | 0,21 | 0,42 | 0,85 | 1,3 |
ω1
А
О1
Y1
Y2
О2
Q5
C
В
мал. 1).
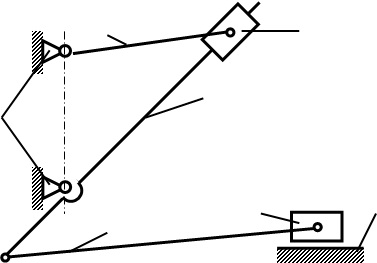
1 2
3
6
5
5 6
4
мал. 2).
1.2 Структурний аналіз механізму. Виконуємо аналіз кінематичного ланцюгу (мал. 2):
1-6 – обертальна кінематична пара 5-го класу;
1-2 - обертальна кінематична пара 5-го класу;
3-6 - обертальна кінематична пара 5-го класу;
3-4 - обертальна кінематична пара 5-го класу;
4-5 - обертальна кінематична пара 5-го класу;
2-3 - поступальна кінематична пара 5-го класу;
5-4 - поступальна кінематична пара 5-го клас.
Проаналізуємо кінематичні ланки (мал. 2):
1 – кривошип;
2 – куліса;
3 – коромисло;
4 – шатун;
5 – повзун;
6 – стояк.
Визначаємо рухомість механізму (мал.1) за формулою Чебишева:
![]()
де: n - кількість ланок;
Р5 – кількість кінематичних пар 5-го класу;
Р4 – кількість кінематичних пар 4-го класу.
Визначаємо клас механізму, який дорівнює найвищому класу групи Ассура входячої до складу механізму.
 5
5
4 діада 2-го класу
 2-го виду
2-го виду
2
діада 2-го класу
2-го виду
3
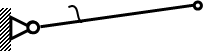 1 механізм 1-го класу
1 механізм 1-го класу
(мал. 3)
Висновок: даний механізм згідно проведеного аналізу відноситься до механізму 2-го класу з рухомістю рівній одиниці. Це означає те, що нам достатньо виконати ведучою лише одну ланку.
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
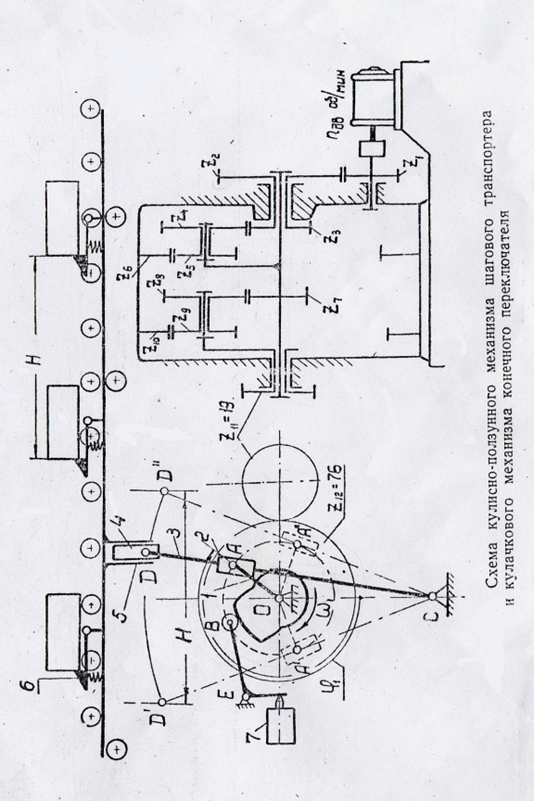
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...
... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев