Навигация
Визначення прискорення точок та кутове прискорення ланок
22720
знаков
5
таблиц
10
изображений
1.5 Визначення прискорення точок та кутове прискорення ланок.
Розглянемо прискорення точок та кутове прискорення ланок на прикладі першого положення.
Визначаємо прискорення точки А:
![]()
![]()
Прискорення точки А2 дорівнює прискорення точки А1 , так як вони рухаються разом.
Визначаємо прискорення точки А3 графічно вирішуючи систему:
де: αA3A2K – відносне каріолісове прискорення точки А3
αА3А2τ, αА3О2τ – відносне тангенціальне прискорення точки А3
![]()
Перераховуємо в графічний аналог:
![]()
Порахуємо відносне нормальне прискорення точки А3:
![]()
На плані (креслення №1) з точки α3 відкладаємо перпендикулярно ланці АО2 відрізок α2α3’ і з кінця якого проводимо паралельно до АО2 промінь. З полюса паралельно АО2 відкладаємо відрізок πα3’’, з кінця якого проводимо перпендикуляр до АО2 і на перетині променя проведеного з точки α3’ і з точки α3’’ ми отримуємо точку α3 , з’єднавши її з полюсом ми отримаємо графічний аналог прискорення точки А3.
Знаходимо дійсне прискорення точки А3:
![]()
Визначаємо прискорення точки В за теоремою подібності:
![]()
Знаходимо дійсне прискорення точки В:
![]()
Визначаємо прискорення точки С вирішуючи рівняння графічно:
де: αСВn – відносне нормальне прискорення точки С
αСВτ – відносне тангенціальне прискорення точки С
Знайдемо відносне нормальне прискорення точки С:
![]()
Перерахуємо в графічний аналог:

З точки В відкладаємо відрізок ВС’ паралельно до ланки ВС. З кінця якого проводимо перпендикуляр до перетину з горизонталлю. Точка їх перетину і буде точкою С, з’єднавши її з полюсом ми отримаємо графічний аналог прискорення точки С.
Знайдемо дійсне прискорення точки С:
![]()
Кутове прискорення третьої ланки знаходимо як відношення відповідного відносного тангенціального прискорення до його довжини:

Аналогічно розраховуємо кутове прискорення для четвертої ланки
Аналогічно розраховуємо все і для нульового положення механізму.
1.6 Силовий розрахунок.
Силовий розрахунок розглянемо на прикладі першого положення механізму.
Розрахуємо моменти інерції:
![]()
![]()
де: JS3 , JS4 – осьовий момент інерції.
Розраховуємо сили інерції ланок і ваги:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Визначимо масштабний коефіцієнт:
![]()
Перерахуємо сили в графічний аналог
![]()
Перерахуємо вагу в графічний аналог:
![]()
![]()
![]()
![]()
![]()
Вилучаємо з механізму ланку 4-5. Складаємо суму моментів відносно точки В і знаходимо реакцію R65.
![]()


Перерахуємо реакцію R65 в графічний аналог:
![]()
Складемо векторне рівняння суми всіх сил діючих на ланку 4-5:
![]()
Будуємо силовий многокутник, з якого знаходимо реакцію R34:
![]()
Знаходимо дійсну реакцію R34:
![]()
Вилучаємо з механізму ланку 3.
Складемо суму моментів відносно точки О2 і знайдемо реакцію R23:
![]()

Перерахуємо реакцію R23 в графічний аналог:
![]()
Складемо векторну суму всіх сил діючих на ланку:
![]()
Будуємо силовий многокутник і знаходимо реакцію R63:
![]()
Знайдемо дійсне значення реакції R63:
![]()
Вилучаємо з механізму ланку 2 і складаємо векторне рівняння:
![]()
Будуємо силовий многокутник і знаходимо реакцію R12:
![]()
Знайдемо дійсне значення реакції R12:
![]()
Вилучаємо з механізму ланку 1
Складаємо суму моментів відносно точки О, і знаходимо зрівноважуючий момент:
![]()
![]()
![]()
Будуємо силовий многокутник і знаходимо реакцію R61:
![]()
Знаходимо дійсне значення реакції R61:
![]()
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
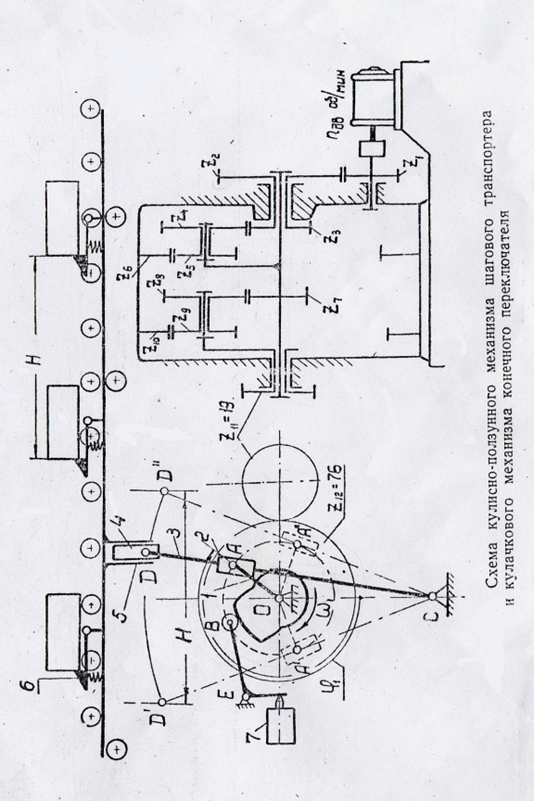
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...
... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев