Навигация
Побудова положень механізму
22720
знаков
5
таблиц
10
изображений
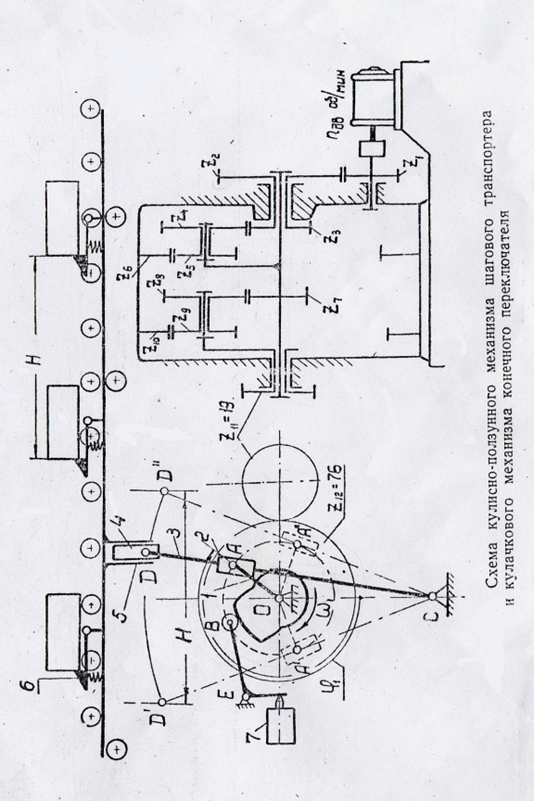
1.3 Побудова положень механізму.
На кресленні № 1 довільно вибираємо точку О1 . За розмірами відкладаємо точку О2 . Навколо точки О1 проводимо коло радіусом О1А. З точки О2 проводимо дугу радіуса О2В. До кола О1А з дуги, через точку О2 проведемо дотичні, і добудуємо інші точки і ланки методом насічок. Ці положення і є крайніми положеннями механізму. Кожен із отриманих двох кутів поділимо на чотири рівні кути. І добудуємо інші положення механізму методом насічок. Ми отримаємо вісім положень механізму.
1.4 Визначаємо швидкість точок і кутову швидкість ланок.
Знайдемо швидкість точок і швидкість ланок для першого положення механізму.
Визначаємо швидкість точки А
![]()
На кресленні № 1 довільно вибираємо полюс P і перпендикулярно ланці О1А1 довжиною 50 мм провидимо відрізок, який і є графічним аналогом швидкості.
Визначаємо масштабний коефіцієнт:
![]()
Швидкість точки А2 дорівнює швидкості точки А1 , так як куліса 2 і ланка 1 рухається разом.
Визначаємо швидкість точки А3 графічно, враховуючи систему:
де: VA2 ,VO2 – переносні швидкості точки А3 ,
VA3A2 ,VA3O2 – відносні швидкості точки А3 .
На плані з точки О2 проводимо паралельну до А3О2 , а з полюса P проводимо перпендикулярну до А3О2 . Точка їх перетину і буде точкою О3 . з’єднуємо її з полюсом і отримуємо швидкість точки А3 .
Знаходимо дійсну швидкість точки А3:
![]()
Визначаємо швидкість точки В за теоремою подібності (чергування букв, як на механізмові так і на планові повинно співпадати при одному і тому ж напрямку обходу):
![]()
Знаходимо дійсну швидкість точки В:
![]()
![]()
де: VВ – переносні швидкості точки С,
VСВ – відносні швидкості точки С.
З точки b проводимо перпендикуляр до ланки ВС і на перетині його з горизонталлю, ми отримуємо точку С і з’єднавши її з полюсом ми отримуємо графічний аналог швидкості точки С.
Знаходимо дійсну швидкість точки С:
![]()
Кутову швидкість ланки 3 знаходимо, як відношення відповідної відносної швидкості до її довжини:
![]()
![]()
Для інших положень механізму розрахунки ведемо аналогічно, а результати заносимо в таблицю № 2.
Таблиця № 2|
| 0,8 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
| VA1=VA2 | м\с | 3,6 | 3,6 | 3,6 | 3,6 | 3,6 | 3,6 | 3,6 | 3,6 |
| VA3=VA3O2 | м\с | 0 | 2,88 | 2,988 | 0 | 2,304 | 3,528 | 3,456 | 2,232 |
| VB | м\с | 0 | 1,44 | 1,584 | 0 | 0,72 | 1,008 | 1,008 | 0,792 |
| VC | м\с | 0 | 1,368 | 1,584 | 0 | 0,72 | 1,008 | 0,936 | 0,72 |
| VA3A2 | м\с | 3,6 | 2,124 | 2,016 | 3,6 | 2,738 | 1,008 | 1,08 | 2,808 |
| VCB | м\с | 0 | 0,3168 | 0,288 | 0 | 0,218 | 0,108 | 0,144 | 0,252 |
| ω3 | 1\с | 0 | 28,8 | 31,68 | 0 | 14,4 | 20,16 | 20,16 | 15,84 |
| ω4 | 1\с | 0 | 1,98 | 1,8 | 0 | 1,35 | 0,675 | 0,9 | 1,575 |
Так як куліса рухається поступально, то ω2 не буде.
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...
... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев