Навигация
Знаходження мінімального радіуса кулачка
22720
знаков
5
таблиц
10
изображений
3.3 Знаходження мінімального радіуса кулачка.
Будуємо залежність аналога швидкості від переміщення штовхача ![]() .
.
Визначаємо масштабний коефіцієнт:
![]()
Перераховуємо дійсне переміщення штовхача в графічний аналог:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
На ординаті відкладаємо переміщення штовхача (графічне), а на осі абсцис відкладаємо відрізки Х, які знаходимо за формулою:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Об’єднуємо отримані точки кривою, через кінці найбільших відрізків проводимо вертикальні лінії, до них проводимо промені під кутом δ дотичними до графіка ƒ(φ)=dS/dφ
Перетин ліній кутів δ є точка О1 і є центром маси кулачка. Відстань О1О є мінімальним радіусом кулачка.
![]()
Відстань точки О1 по горизонталі від осі ординат є ексцентриситетом.
![]()
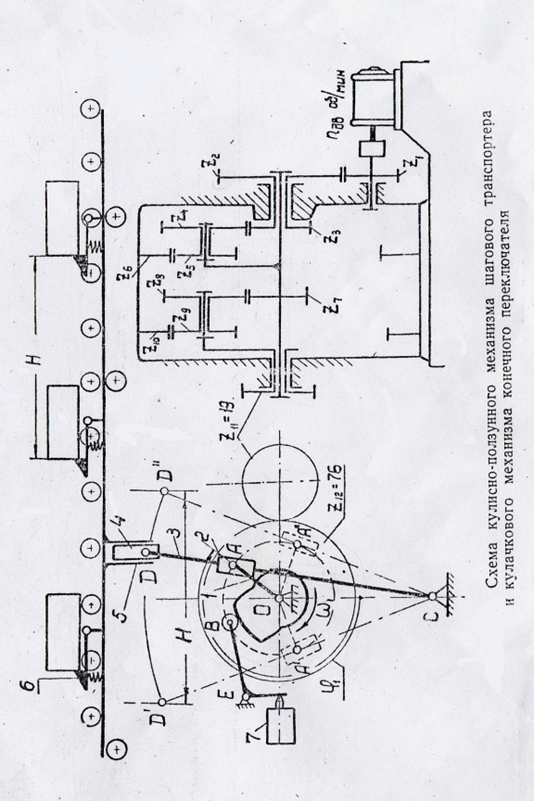
3.4 Проектування профілю кулачка.
З точки О1 проводимо кола rmin, rmin+іh. На відстані е від точки О1 проводимо вертикаль, на ній відкладаємо відрізки переміщення штовхача. Проводимо вертикаль з точки О1, від якої відкладаємо кути φп,φс,φо, в сторону протилежну ω. Кути φБ і φА ділимо на вісім рівних частин, отримуємо точки 0÷17. З цих точок проводимо промені дотичні до кола радіуса е. З точок 0÷17 відкладених на вертикалі проводимо концентричні кола до перетину з відповідними дотичними точками. На їх перетині отримуємо точки 0’÷17’. Об,єднуємо їх плавною лінією і отримуємо теоретичний профіль кулачка.
Визначаємо радіус ролика кулачка:
![]()
Використовуючи теоретичний профіль кулачка як геометричне місце точок центрів ролика проводимо рід кіл радіусом rP.
Робочій профіль будуємо дотичною лінією до кіл радіусом rP.
4. Проектування зубчатого зачеплення.
4.1 Вихідні данні.
m - 3 (модуль зачеплення);
Y - 0.6 (коефіцієнт сприйнятого зміщення);
![]() (кількість зубців).
(кількість зубців).
4.2 Визначення розмірів геометричних параметрів.
Визначаємо радіуси ділильних кіл:
![]()
![]()
Визначаємо крок зачеплення:
![]()
Визначимо радіуси основних кіл:
![]()
![]()
де: α=20°
Визначаємо міжосьову відстань:
![]()
![]()
Визначимо кут зачеплення:

Визначаємо радіуси початкових кіл:
![]()
![]()
Визначаємо коефіцієнт зміщення:
![]()
![]()
![]()
Визначаємо коефіцієнт зміщення інструмента на шестерні:

![]()
Визначаємо радіуси кола западин:
![]()
![]()
де: ha*=1; C*=0,25.
Визначаємо радіуси кола виступів:
![]()
![]()
Визначаємо ширину зубців по ділильному колу:
![]()
![]()
Визначаємо висоту ніжки зубця:
![]()
Визначаємо висоту зубця:
![]()
Перевірка:
![]()
![]()
![]()
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...
... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев