Навигация
1.7 Важіль Жуковського.
Візьмемо план швидкості для першого положення і повернемо його на 90°. Знесемо на нього усі зовнішні сили. Сума моментів відносно полюса дасть нам зрівноважуючий момент.

![]()
Розрахуємо похибку між моментом отриманим з силового розрахунку і моментом отриманим з важеля
![]()
що задовольняє розрахункам.
1.8 Графіки.
На осі ординат відкладаємо переміщення повзуна, а на осі абсцис кут повороту кривошипу.
Визначимо масштабний коефіцієнт
![]()
де: Х – відрізок на осі абсцис.
![]()
де: С0С3 – відстань між мертвими положеннями;
Y3 - відстань на осі ординат на графіку, відповідаючи відстані між мертвими положеннями.
Кути повороту отримані при побудові положень механізму, перераховуємо за формулою у довжині
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Перераховуємо переміщення повзуна:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
На графіку на осі абсцис відкладаємо довжини ℓi.. З отриманих точок проводимо промені. На відповідних променях відкладаємо відповідні довжини Si.. З’єднавши отримані точки отримаємо графік переміщень
![]()
Графічно диференціюючи цей графік ми отримаємо “аналог швидкостей” в масштабі:

де: Нi – відстань від осі ординат до полюса Р1.
Графічно диференціюючи графік “аналог швидкостей”, ми отримаємо графік “аналог прискорення” в масштабі:
де: Н2 – відстань від осі ординат до полюса Р2.
2.дВизначення осьового моменту інерції маховика.
2.1 Вихідні данні.
Вихідними даними є данні креслення № 1, крім того додається закон зміни сили Q та коефіцієнт нерівномірності руху δ.
Qs

Sc (мал. 4)
Закон зміни сили Q
Коефіцієнт нерівномірності руху - ![]()
2.2 Визначення сили Q.
На кресленні № 1, на вісь переміщення повзуна наносимо закон зміни сили Q і з точок робочого ходу проводимо відрізки. Це є граничні аналоги сил Q для положень робочого ходу, для холостого ходу сили Q приймаємо рівними нулю, так як закон зміни сили Q прямокутник.
Тому:
![]()
![]()

С1 С2 С3 С4 С5 С6 С7 С8
(мал. 5)
Похожие работы
... , если к нему приложить уравновешивающую силу и моменты. 2.8 Сравним полученные значения Рур, рассчитанные по методу плана сил и методом рычага Жуковского. Вывод: Проведя силовой анализ механизма, определили реакцию опор, нашли уравновешивающую силу, выяснили, что на данный механизм влияют силы инерции. РАЗДЕЛ III Проектирование эвольвентного зубчатого зацепления Задачами ...
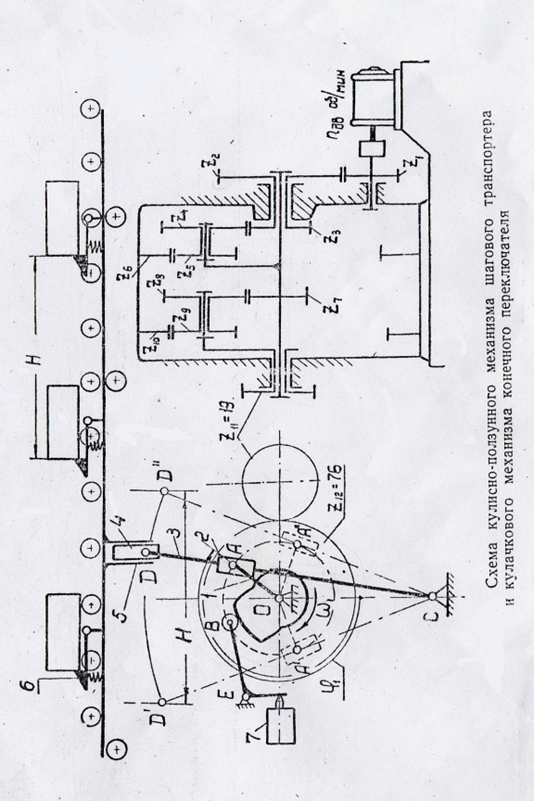
... При графическом изображении физических величин масштаб обозначается буквой с индексом, указывающим, к какой величине он относится. 1. Проектирование основного механизма и определение закона движения 1.1 Проектирование механизма по заданным условиям Механизм шагового транспортера автоматической линии вычерчен в масштабе =50мм/м. Положения начального звена 1 при вращении вокруг центра О ...
... аналогов скоростей рs2 , ps4. Положение механизма. 1 2 3 4 5 6 6’ 7 8 9 10 11 ps2 75 71 70 76 90 110 0 110 103 98 93 84 ps4 42 49 62 93 117 81 0 106 118 96 68 47 1.3 Динамический анализ механизма 1.3.1 Расчет и построение графика приведённого момента сил полезного сопротивления Рассчитаем значение приведённого момента сил полезного сопротивления для ...
... Прод. П/кр. Прод.. Гарантийный срок службы, ч 500 500 500 400 50 25цикл 10 Масса, кг 1,4 2,6 3,0 2,0 1,8 3,5 Технические характеристики Д-0,1 Д-0,16 А Д-5 Д-7 Д-25А Д-25-1С Д-40 Д-50А Д-55 Напряжение питания, В 2,8 4,5 27 27,5 27 27 27 27 27 Номинальный момент •10 4,Н · м 4,9 6,37 41,2 102 399 285 ...
0 комментариев