Графический метод кинематического анализа
По свойству подобия находим на плане скоростей точку С, которая принадлежит звену 2 и 4, то есть является крайней точкой второй группы Ассура
Силовой анализ плоско-рычажного механизма
Определение уравновешивающей силы
Приведенный момент инерции рычажного механизма
Определение момента инерции маховика
Построение элементов зубчатого зацепления
Синтез редуктора с планетарной передачей
Навигация
По свойству подобия находим на плане скоростей точку С, которая принадлежит звену 2 и 4, то есть является крайней точкой второй группы Ассура
Анализ и синтез механизмов
27087
знаков
7
таблиц
13
изображений
4. По свойству подобия находим на плане скоростей точку С, которая принадлежит звену 2 и 4, то есть является крайней точкой второй группы Ассура.
Длину вектора ![]() определяем из соотношения:
определяем из соотношения:
![]()
откуда:
![]()
Отрезок ![]() представляет собой вектор скорости точки С.
представляет собой вектор скорости точки С.
5. Скорость средней точки второй группы Ассура D4 определяем через скорости крайних точек этой группы С и О3.
Скорость точки D4 относительно точки С:
![]()
Скорость точки D4 относительно точки О3:
![]()
Отрезок ![]() представляет собой вектор скорости точки D4, решаем графически.
представляет собой вектор скорости точки D4, решаем графически.
Центры тяжести весомых звеньев определяем по свойству подобия.
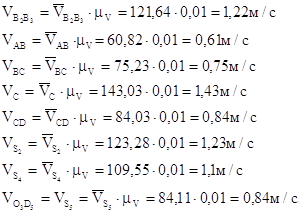
6. Пользуясь планом скорости, определяем истинные (абсолютные) значения скоростей точек механизма:
7. Определяем абсолютные величины угловых скоростей звеньев:
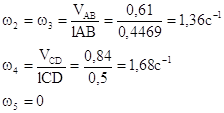
где lАВ= lАВ∙μl =89,38· 0,005 = 0,4469 м
1.2.2.2 Построение плана ускорения
Исходные данные: 1. Кинематическая схема механизма (1 лист)
2. Угловая скорость ведущего звена ![]()
3. План скоростей для заданного положения.
1. Абсолютное ускорение точки А на конце ведущего звена:
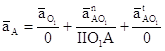
![]()
2. Масштабный коэффициент:

Длина вектора ускорения точки А1:
![]()
3. Ускорение средней точки первой группы Ассура – точки В2 определяем через ускорения крайних точек этой группы А и О2.
Ускорение точки В2 относительно точки А:
![]()
![]()
![]()
![]()
Ускорение точки В относительно точки О2:
![]()
Величина ускорения Кориолиса определяется по модулю формулой:
![]()
Длина вектора, изображающего ускорение Кориолиса на плане ускорений равна:
![]()
Для определения направления ускорения Кориолиса вектор относительной скорости ![]() поворачиваем на 90о по направлению угловой скорости
поворачиваем на 90о по направлению угловой скорости ![]() .
.
Из конца вектора ![]() проводим линию действия релятивного ускорения
проводим линию действия релятивного ускорения ![]() параллельную звену АВ.
параллельную звену АВ.
Решаем графически.
4. По свойству подобия находим на плане ускорения точку С, которая принадлежит звеньям 2 и 4, то есть является крайней точкой второй группы Ассура.
![]()
откуда:
![]()
5. Ускорение средней точки второй группы Ассура – точки D4 определяем через ускорения крайних точек этой группы C и О3, причем точка D4 принадлежит звену 4 и совпадает с точкой D5.
Ускорение точки D4 относительно точки С:
![]()
![]()
![]()
![]()
Ускорение точки D4 относительно точки О3:
![]()
![]()
Решаем графически.
Центры тяжести весомых звеньев определяем по свойству подобия
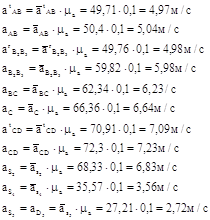
6. Пользуясь планом ускорений, определяем истинные (абсолютные) значения ускорений точек механизма:
![]()
7. Определяем абсолютные величины угловых ускорений звеньев:
На этом кинематическое исследование кривошипно-ползунного механизма завершено.
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... А. Черкудиновым (1959 г.), отразили состояние теории современного учения о механизмах. Одновременно И. И. Артоболевский начинает исследования в области теории механизмов машин автоматического действия: гидравлических, пневматических и гидропневматических. Для современных машин характерны вибрационные явления и существенное изменение массы в процессе работы. Чтобы учесть эти факторы, в большинстве ...
... успешному развитию у детей процессов пространственного анализа и синтеза. Заключение В данной работе были рассмотрены психологические условия коррекции нарушений пространственного анализа и синтеза у детей с психомоторными недостатками при помощи физических упражнений. В настоящее время внимание значительной части педагогов, психологов и социальных работников привлечено к ...
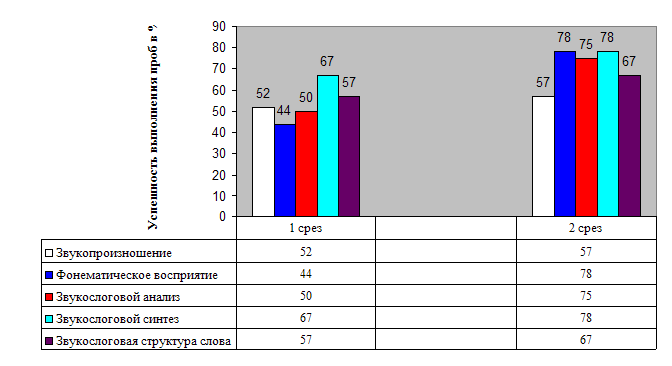
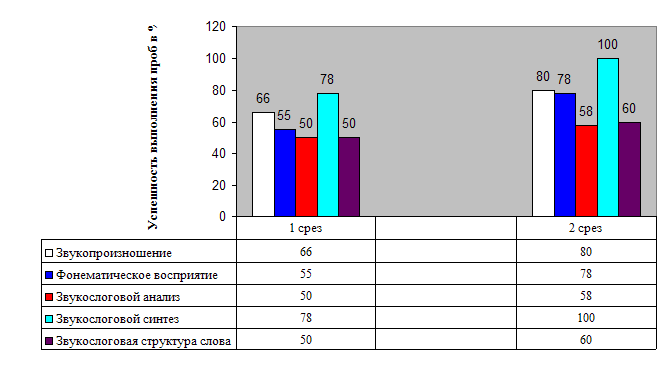
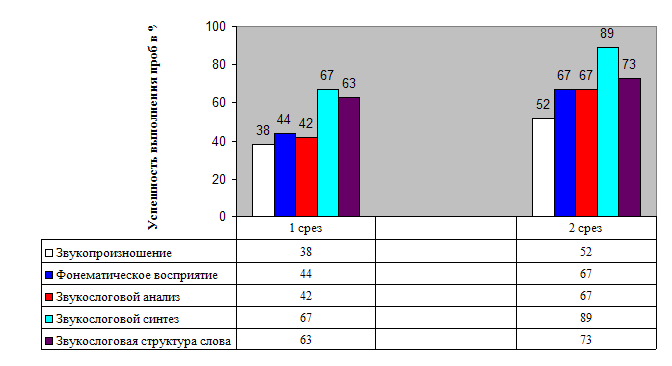
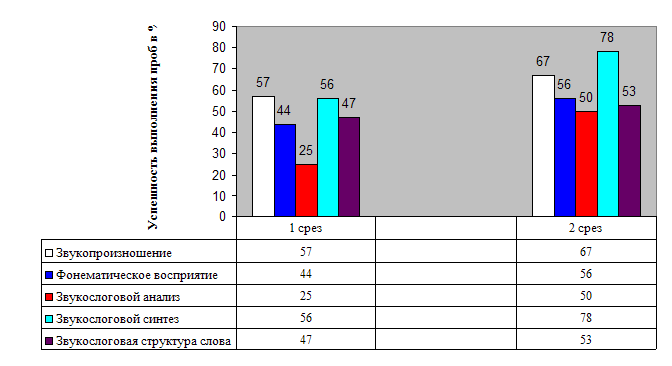
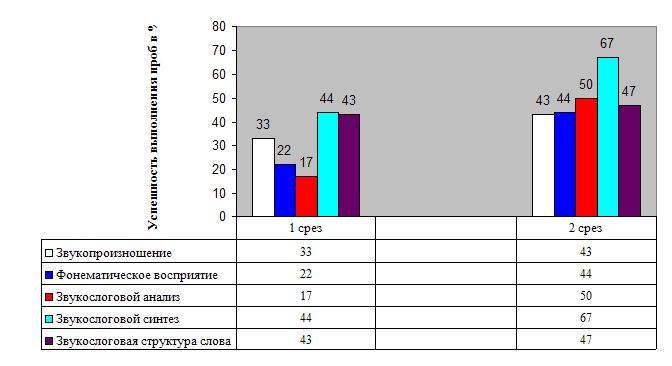
... находятся в слове. Для реализации основных направлений были подобраны специальные приемы и упражнения. Глава III ФОРМИРОВАНИЕ ЗВУКОСЛОГОВОГО АНАЛИЗА И СИНТЕЗА У МЛАДШИХ ШКОЛЬНИКОВ С ФОНЕТИКО-ФОНЕМАТИЧЕСКИМ НЕДОРАЗВИТИЕМ РЕЧИ 3.1 Динамика развития звукослогового анализа и синтеза у учащихся 1 класса После проведения серии коррекционно - развивающих занятий, был сделан второй контрольный ...
0 комментариев