Графический метод кинематического анализа
По свойству подобия находим на плане скоростей точку С, которая принадлежит звену 2 и 4, то есть является крайней точкой второй группы Ассура
Силовой анализ плоско-рычажного механизма
Определение уравновешивающей силы
Приведенный момент инерции рычажного механизма
Определение момента инерции маховика
Построение элементов зубчатого зацепления
Синтез редуктора с планетарной передачей
Навигация
Построение элементов зубчатого зацепления
Анализ и синтез механизмов
27087
знаков
7
таблиц
13
изображений
4.3 Построение элементов зубчатого зацепления
Принимаем масштаб построения:
![]() 0,0004
0,0004![]() = 0,4
= 0,4 ![]()
На линии центров колес от линии W откладываем радиусы начальных окружностей (![]() и
и ![]() ), строим их так, чтобы точка W являлась их точкой касания.
), строим их так, чтобы точка W являлась их точкой касания.
Проводим основные окружности (![]() и
и ![]() ), линию зацепления n – n касательно к основным окружностям и линию t – t, касательно к начальным окружностям через точку W. Под углами aW к межосевой линии проводим радиусы
), линию зацепления n – n касательно к основным окружностям и линию t – t, касательно к начальным окружностям через точку W. Под углами aW к межосевой линии проводим радиусы ![]() и
и ![]() и отмечаем точки А, В теоретической линии зацепления.
и отмечаем точки А, В теоретической линии зацепления.
Строим эвольвенты, которые описывает точка W прямой АВ при перекатывании её по основным окружностям. При построении первой эвольвенты делим отрезок AW на четыре равные части. На линии зацепления n – n откладываем примерно 7 таких частей. Также 7 частей откладываем на основной окружности ![]() от точек А и В в разные стороны. Из полученных точек на основной окружности проводим радиусы с центром О1 и перпендикуляры к радиусам. На построенных перпендикулярах откладываем соответственное количество частей, равных четверти расстояния AW. Соединив полученные точки плавной кривой получаем эвольвенту для первого колеса. Аналогично строим эвольвенту для второго зубчатого колеса.
от точек А и В в разные стороны. Из полученных точек на основной окружности проводим радиусы с центром О1 и перпендикуляры к радиусам. На построенных перпендикулярах откладываем соответственное количество частей, равных четверти расстояния AW. Соединив полученные точки плавной кривой получаем эвольвенту для первого колеса. Аналогично строим эвольвенту для второго зубчатого колеса.
Строим окружности головок обоих колес (![]() и
и ![]() ).
).
Строим окружности впадин обоих колес (![]() и
и ![]() ).
).
Из точки пересечения эвольвенты первого колеса с делительной окружностью этого колеса ![]() откладываем половину толщины зуба 0,5 S1 по делительной окружности. Соединив полученную точку с центром колеса О1 получаем ось симметрии зуба. На расстоянии шага по делительной окружности строим еще два зуба. Аналогично строим зубья второго колеса.
откладываем половину толщины зуба 0,5 S1 по делительной окружности. Соединив полученную точку с центром колеса О1 получаем ось симметрии зуба. На расстоянии шага по делительной окружности строим еще два зуба. Аналогично строим зубья второго колеса.
Определяем активную часть линии зацепления (отрезок ав).
Строим рабочие участки профилей зубьев. Для этого из центра О1 проводим дугу радиуса О1а до пересечения с профилем зуба. Рабочим участком зуба является участок от полученной точки до конца зуба. Те же действия производим с зубом второго колеса, проведя окружность О2в из центра О2.
Строим дуги зацепления, для этого через крайние точки рабочего участка профиля зуба проводим нормали к этому профилю (касательные к основной окружности) и находим точки пересечения этих нормалей с начальной окружностью. Полученные точки ограничивают дугу зацепления. Произведя построения для обоих колес получаем точки а/, в/, а// и в//.
4.4 Определение качественных показателей зацепления
Аналитический коэффициент перекрытия определяем по формуле:
![]() (√(75,58452 – 56,381562) + √(163,16452 –
(√(75,58452 – 56,381562) + √(163,16452 –
– 140,953912) – 220,46446 · Sin 26,48o) / 3,14 · 10 · Cos20о = 1,1593
Графический коэффициент перекрытия определяем по формуле:
![]() 34,22 / 3,14 · 10 · 0,939693 = 1,15930
34,22 / 3,14 · 10 · 0,939693 = 1,15930
где ав = ав * µ = 85,56 · 0,4 = 34,22 мм – длина активного участка.
Определение процента расхождения:
![]() (1,15930 – 1,1593) / 1,1593 · 100% = -0,00021%
(1,15930 – 1,1593) / 1,1593 · 100% = -0,00021%
4.5 Определение коэффициентов относительного скольжения
Коэффициенты относительного скольжения определяем по формулам:
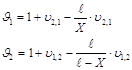
где ![]() = АВ = 256,07 мм – длина теоретической линии зацепления,
= АВ = 256,07 мм – длина теоретической линии зацепления,
![]() 12 / 30 = 0,4
12 / 30 = 0,4
![]() 30 / 12 = 2,5
30 / 12 = 2,5
Х – расстояние от точки А отсчитываемое в направлении к точке В.
Пользуясь формулами, составляем таблицу. Для этого подсчитываем ряд значений ![]() и
и ![]() , изменяя Х в границах от 0 до
, изменяя Х в границах от 0 до ![]() .
.
Таблица коэффициентов скольжения
| Х | 0 | 15 | 30 | 45 | 60 | AW | 100 | 130 | 160 | 190 | 220 | 245,76 |
| υ1 | -∞ | -5,154 | -1,877 | -0,785 | -0,238 | 0,000 | 0,417 | 0,644 | 0,786 | 0,883 | 0,953 | 1 |
| υ2 | 1 | 0,837 | 0,652 | 0,440 | 0,193 | 0,000 | -0,715 | -1,808 | -3,664 | -7,519 | -20,351 | -∞ |
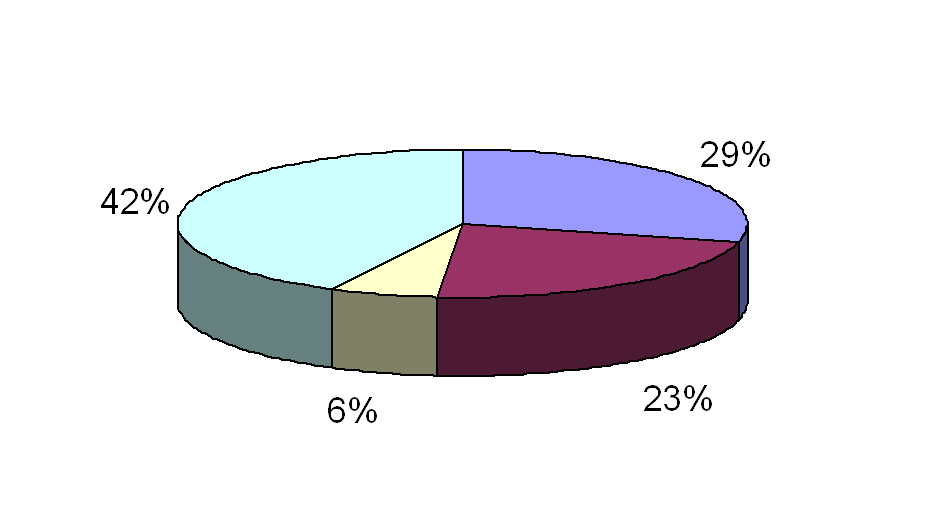
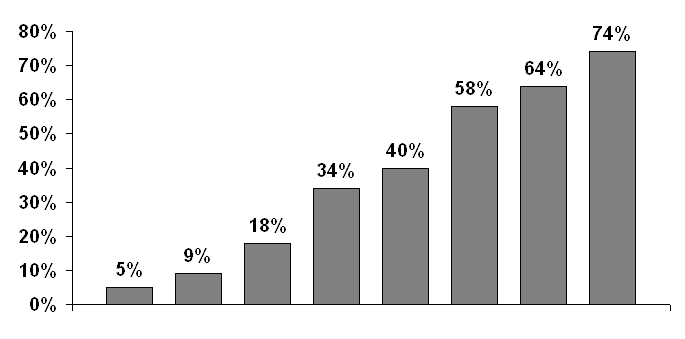
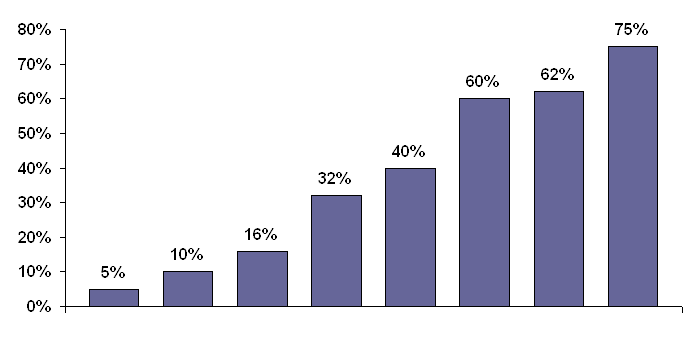
Из таблицы строим диаграммы в прямоугольной системе координат.
Далее строим круговые диаграммы, проецируя значение Х на активную часть линии зацепления. Из полученных точек, проводим окружности, на которых откладываем соответствующие значения коэффициента скольжения.
Похожие работы
... механизма для обеспечения эффективного перехода на различные способы транспортирования в зависимости от свойств материала и выполняемой технологической операции. Разработке методов кинематического анализа механизмов транспортирования ткани швейных машин и соответствующего этой задаче алгоритмического и программного обеспечения посвящены работы. [67],[71],[72]. В работе Ю.Ю.Щербаня и В.А.Горобца ...
... А. Черкудиновым (1959 г.), отразили состояние теории современного учения о механизмах. Одновременно И. И. Артоболевский начинает исследования в области теории механизмов машин автоматического действия: гидравлических, пневматических и гидропневматических. Для современных машин характерны вибрационные явления и существенное изменение массы в процессе работы. Чтобы учесть эти факторы, в большинстве ...
... успешному развитию у детей процессов пространственного анализа и синтеза. Заключение В данной работе были рассмотрены психологические условия коррекции нарушений пространственного анализа и синтеза у детей с психомоторными недостатками при помощи физических упражнений. В настоящее время внимание значительной части педагогов, психологов и социальных работников привлечено к ...
... находятся в слове. Для реализации основных направлений были подобраны специальные приемы и упражнения. Глава III ФОРМИРОВАНИЕ ЗВУКОСЛОГОВОГО АНАЛИЗА И СИНТЕЗА У МЛАДШИХ ШКОЛЬНИКОВ С ФОНЕТИКО-ФОНЕМАТИЧЕСКИМ НЕДОРАЗВИТИЕМ РЕЧИ 3.1 Динамика развития звукослогового анализа и синтеза у учащихся 1 класса После проведения серии коррекционно - развивающих занятий, был сделан второй контрольный ...
0 комментариев