Построение квадратичной двумерной стационарной системы
Построение квадратичной двумерной стационарной системы с частным интегралом в виде кривой первого порядка
Качественное исследование построенных классов систем
Исследование одной системы из второго класса построенных двумерных стационарных систем
Навигация
Исследование одной системы из второго класса построенных двумерных стационарных систем
Качественное исследование в целом двумерной квадратичной стационарной системы с двумя частными интегралами в виде кривых второго и первого порядков
24313
знаков
2
таблицы
9
изображений
2.2 Исследование одной системы из второго класса построенных двумерных стационарных систем
Рассмотрим систему (1.1) в предположении, что в1=в2=с2=1, а1=![]()
и коэффициенты определяются формулами (1.19). Тогда система (1.1) будет иметь вид:
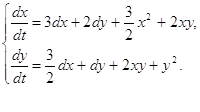 (2.7)
(2.7)
Интегральные кривые в этом случае имеют вид:
4y2–4xy+x2+dy=0, (2.8)
-![]() x+y=0. (2.9)
x+y=0. (2.9)
Найдём состояния равновесия системы (2.7). Для этого приравняем правые части системы нулю:

Решая эту систему, получим две пары точек, которые являются точками покоя системы (2.7): О (0,0), А(![]() ).
).
Исследуем поведение траекторий решений системы (2.7) в окрестностях состояний равновесия О (0,0), А(![]() ).
).
1. Исследуем точку О (0,0).
Составим характеристическое уравнение системы в точке О (0,0):
 =0,
=0,
![]() .
.
Характеристическими числами для точки О (0,0), будут ![]()
![]()
Так как один корень нулевой, тогда точка О (0,0) является сложным состоянием равновесия (изолированное состояние равновесия), для которого требуется дополнительное исследование. Для определения характера состояния равновесия О (0,0) воспользуемся теоремой [5].
Теорема 2.1 Пусть точка (0,0) – изолированное состояние равновесия системы:
![]()

где φ (x, y), ψ (x, y) – полиномы от x, y начиная со второй степени, y=φ(x) – решение уравнения y+Q2(x, y)=0, а разложение функции ψ(x)=P2(x, φ(x)) имеет вид:
![]()
Тогда:
1) при m-нечётном и ∆m>0 точка (0,0) – есть топологический узел;
2) при m-нечётном и ∆m<0 точка (0,0) – есть топологическое седло;
3) при m-чётном точка (0,0) есть седло-узел, то есть такое состояние равновесия, каноническая окрестность которого состоит из параболического и двух гиперболических секторов; При этом:
а) если ∆m<0, то внутри гиперболических
секторов заключён отрезок положительной
полуоси ОХ, примыкающий к точке (0,0);
б) если ∆m<0, то – отрезок отрицательной
полуоси ОХ.
Чтобы воспользоваться теоремой, необходимо систему (2.7) привести к виду:
 (2.10)
(2.10)
Это возможно сделать, воспользовавшись одним из следующих преобразований:
1. если в≠0, 
2. если в=0, а=0, 
3. если в=0, d=0, 
где а, в, с, d – коэффициенты системы (2.7).
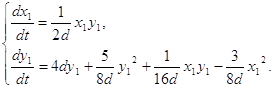
Для системы (2.7) воспользуемся следующим преобразованием:
Получим:
Откуда:

Следовательно, можем найти:
Тогда:
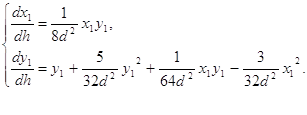
Чтобы данную систему привести к системе вида (2.10), сделаем замену ![]() тогда dt=
тогда dt=![]() dh и получим систему:
dh и получим систему:
Найдём решение уравнения:
y1+![]() (2.11)
(2.11)
в виде ряда по степеням y1:
y1=φ(x1)=c1x1+c2x12+….
Подставим y1=c1x1+c2x12+… в уравнение (2.11), получим:
c1x1+c2x12+ … +![]() (c1x1+c2x12+…)2+
(c1x1+c2x12+…)2+![]() x1(c1x1+c2x12+…)–
x1(c1x1+c2x12+…)–![]() x12=0.
x12=0.
x11: ![]() с1=0,
с1=0,
x12: с2+![]() с1+
с1+![]() с1
с1![]() =0,
=0,
Следовательно с1=0, с2=![]() , ….
, ….
Тогда y1=φ(x1)= ![]() х12+….
х12+….
Находим ψ(х1)=Р2(х1,φ(х1))=![]() (
(![]()
![]() +……)=
+……)=![]() +……..=∆mxm.
+……..=∆mxm.
Получили m=3-нечётное, ∆m>0.
Следовательно, по теореме 2.1 получаем, что точка О (0,0) – топологический узел.
2. Исследуем точку А(![]() ).
).
Составим характеристическое уравнение в точке А(![]() ).
).
Отсюда
Px(x, y)=3d+3x+2y,
Py(x, y)=2d+2x,
Qx(x, y)=![]() d+2y,
d+2y,
Qy(x, y)=d+2x+2y.
Следовательно, характеристическое уравнение имеет вид:
 =0.
=0.
Характеристическими числами для точки А(![]() ) системы (2.7) будут λ1=–4d, λ2=
) системы (2.7) будут λ1=–4d, λ2=![]() d.
d.
Корни λ1, λ2–действительные и одного знака, зависящие от параметра d. Если d<0, тогда точка А(![]() ) – неустойчивый узел; если d>0, тогда точка А(
) – неустойчивый узел; если d>0, тогда точка А(![]() ) – устойчивый узел.
) – устойчивый узел.
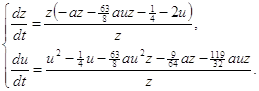
Исследуем бесконечно-удалённую часть плоскости системы (2.7) вне концов оси ОУ. Преобразование [1] ![]() переводит систему (2.7) в систему:
переводит систему (2.7) в систему:
 (2.12)
(2.12)
где t=zτ, dt=zdτ.
Изучим бесконечно-удалённые точки на оси U, то есть z=0. Получаем:
Следовательно, ![]() u1=0, u2=
u1=0, u2=![]() .
.
Таким образом, получили две точки N1(0,0), N2(0,![]() ), которые являются состояниями равновесия. Исследуем характер этих точек обычным способом.
), которые являются состояниями равновесия. Исследуем характер этих точек обычным способом.
1. Исследуем точку N1(0,0).
Составим характеристическое уравнение в точке N1(0,0):
 =0,
=0,
λ1= ![]() , λ2=
, λ2=![]() .
.
Корни λ1,λ2–действительные и различных знаков, следовательно, точка N1(0,0) – седло.
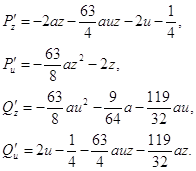
2. Исследуем точку N2(0,![]() ).
).
Составим характеристическое уравнение в точке N2(0,![]() ):
):
Pz=![]() –2u-6dz-4duz,
–2u-6dz-4duz,
Pu=–2z-2dz2,
Qz=![]() d-2du-2du2,
d-2du-2du2,
Qu=![]() –2u-2dz-4duz.
–2u-2dz-4duz.
Характеристическое уравнение имеет вид:
 =0.
=0.
Следовательно, характеристические числа:
λ1=![]() , λ2=
, λ2=![]() .
.
Корни λ1,λ2–действительные, различных знаков, значит точка N2(0,![]() ) является седлом.
) является седлом.
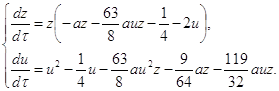
Исследуем бесконечно-удалённые концы оси ОУ с помощью преобразования [1] x=![]() , y=
, y=![]() .Это преобразование переводит (2.7) в систему:
.Это преобразование переводит (2.7) в систему:
где t=zτ, dt=zdτ.
Для исследования состояний равновесия на концах оси ОУ, нам необходимо исследовать только точку (0,0), которая является состоянием равновесия данной системы. Составим характеристическое уравнение в точке (0,0):
![]() =0.
=0.
![]()
Корни λ1,λ2–действительные и различных знаков, значит точка (0,0) – седло.
Теперь дадим распределение состояний равновесия системы (2.7) в виде таблицы 2.
Таблица 2
| d | O (0,0) | A( | ∞ | ||
| N0 | N1 | N2 | |||
| (-∞; 0) | Топологическое Узел | Неустойчивый Узел | Седло | Устойчивый Узел | Седло |
| (0;∞) | Топологическое Узел | Устойчивый Узел | Седло | Устойчивый Узел | Седло |
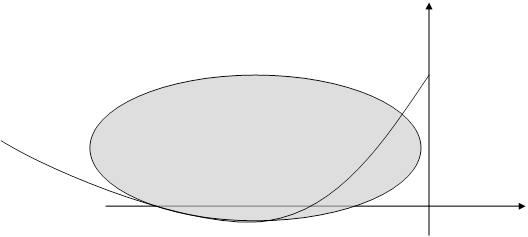
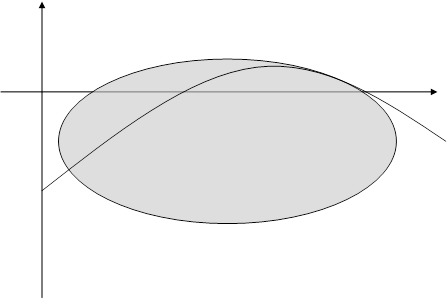
Положение кривых (2.8), (2.9) и расположение относительно их состояний равновесия при d<0 и d>0 даётся соответственно рис. 2 (а, б).
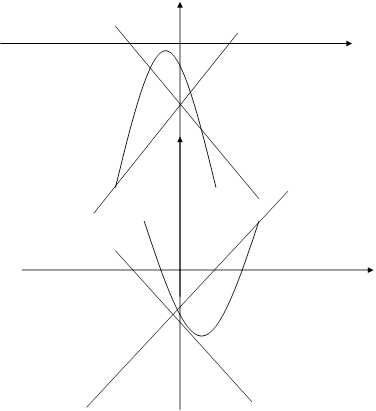
Поведение траекторий системы (2.7) в целом при d<0, d>0 представлено на рис. 4 (а, б) приложения Б.
Так как Воробьёв А.П. [10] доказал, что для систем, правые части которых есть полиномы второй степени, предельный цикл может окружать только точку типа фокуса, тогда исследуя вид кривых (2.8), (2.9) и расположение относительно их состояний равновесия, убеждаемся, что система (2.7) не имеет предельных циклов.
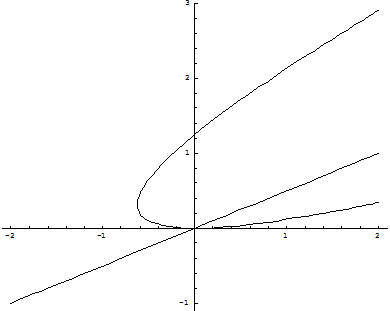
a) d<0
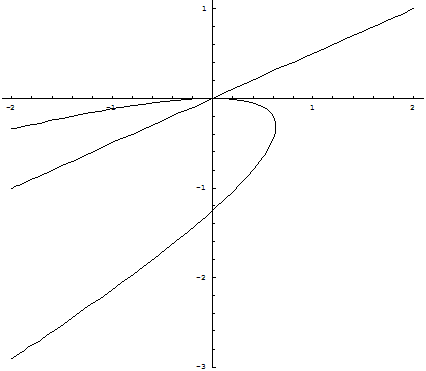
б) d>0
Рис. 2
Заключение
В данной дипломной работе построены два класса квадратичных двумерных стационарных систем при условии, что частными интегралами являются кривые второго и первого порядков. При этом коэффициенты кривых выражаются через произвольные параметры систем.
Проведено качественное исследование построенных классов систем при фиксированном значении одного из параметров системы. Выведены необходимые и достаточные условия существования у системы двух частных интегралов. В зависимости от условий на коэффициенты были рассмотрены два случая. Найдены состояния равновесия полученных систем, которые принадлежат интегральным кривым. Исследована бесконечно-удалённая часть плоскости систем и доказано отсутствие предельных циклов. Построена качественная картина поведения траекторий систем в круге Пуанкаре.
Список источников
1 Пуанкаре А. О кривых, определяемых дифференциальными уравнениями.-М.-Л.: ГИТТЛ, 1947. – 839 с.
2 Бендиксон И. О кривых, определяемых дифференциальными уравнениями. – УМН, 1941. – Вып. 9. – 643 с.
3 Биркгоф Дж.Д. Динамические системы. М.-Л.: Гостехиздат, 1941. – 340 с.
4 Еругин Н.П. Построение всего множества систем дифференциальных уравнений, имеющих заданную интегральную кривую. – ПММ. – 1952. – Т.16, Вып. 6. – с. 659–670.
5 Баутин Н.Н., Леонтович Е.А. Методы и приемы качественного исследования динамических систем на плоскости. - М.: Наука, 1976. – 274 с.
6 Серебрякова Н.Н. Качественное исследование одной системы дифференциальных уравнений теории колебаний. – ПММ. – 1963 Т.27, Вып. 1. – 230 с.
7 Черкас Л.А. Об алгебраических решениях уравнения ![]() , где P и Q – многочлены второй степени // ДАН БССР. – 1963. – Т.7, №11. – 950 с.
, где P и Q – многочлены второй степени // ДАН БССР. – 1963. – Т.7, №11. – 950 с.
8 Яблонский А.И. Алгебраические интегралы одной системы дифференциальных уравнений // Дифференц. уравнения. – 1970. – Т.6, №10. – с. 1752–1760.
9 Филипцов В.Ф. К вопросу алгебраических интегралов одной системы дифференциальных уравнений // Дифференц. уравнения. – 1973. – Т.9, №3. – 256 с.
10 Воробьев А.П. К вопросу о циклах вокруг особой точки типа "узел" // ДАН БССР. – 1960. – Т.4, №9. – 720 с.
Похожие работы
... (0.5) в предположении, что коэффициенты кривых (0.4), (0.5) и системы (0.3) вещественные. Работа состоит из двух глав. В первой главе проводится построение квадратичной двумерной стационарной системы с частными интегралами в виде кривых третьего и первого порядков. При этом коэффициенты интегралов выражаются через коэффициенты системы, а коэффициенты системы связаны между собой тремя ...
... третьего порядка. Яблонский А.И. [11, с.1752 - 1760] и Филипцов В.Ф. [9, с.469-476] изучали квадратичные системы с предположением, что частным интегралом являлись алгебраические кривые четвертого порядка. В данной работе рассматривается система (0.3) и проводится качественное исследование в целом системы (0.3) при условии, что частным интегралом является кривая четвертого порядка, которая ...
... damn(t)/dt =[daij(t)/dt] 1.3 ПОНЯТИЕ ДИНАМЧЕСКОГО ОБЬЕКТА. Физический объект - физическое устройство, характеризуемое некоторым числом свойств, соответствующих целям его использования. В теории систем существенным является не физическое, а математическое описание свойств объекта и соотношений между ними. В теории систем объектом А является абстрактный объект, связанный с множеством ...
... ребрами) изображают конструктивные и потоковые функциональные структуры [14]. Принципы построения функциональных структур технических объектов рассматриваются в последующих главах курса "Основы проектирования им конструирования" не включенных в настоящее пособие. Для систем управления существуют характеристики, которые можно использовать в качестве критериев для оценки структур. Одна из них - ...
0 комментариев