ОПИСАНИЕ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА
Определение предварительной мощности двигателя и тягового усилия
Определение натяжения ленты конвейера методом обхода контура по точкам
Определение вращающих моментов
МПа
Проверочный расчет
Проверка прочности шпоночных соединений
Структура ремонтно-механической службы цеха
Организация и методы ремонта на предприятии
Технические требования на дефекацию и ремонт деталей
Контроль качества ремонта
СМАЗКА ОБОРУДОВАНИЯ
Расчет косвенных затрат
Навигация
Определение натяжения ленты конвейера методом обхода контура по точкам
Ленточный конвейер
77466
знаков
4
таблицы
15
изображений
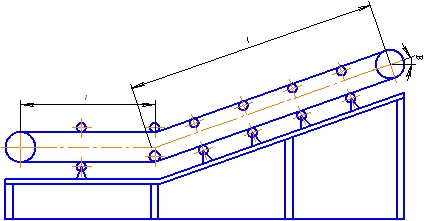
2.3 Определение натяжения ленты конвейера методом обхода контура по точкам
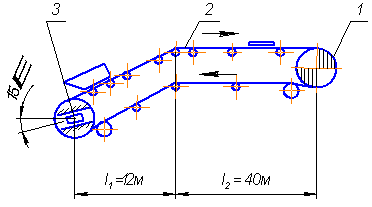
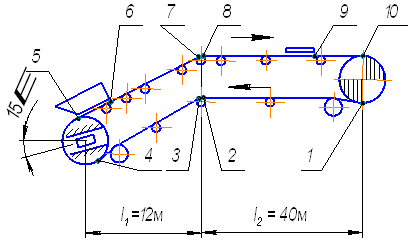
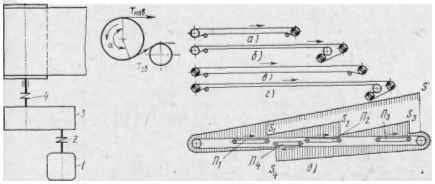
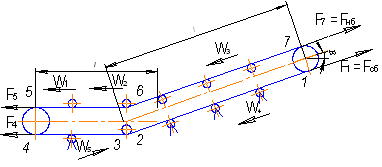
Разбиваем контур конвейера на 4 участка. Натяжение ленты в точке 1 принимаем за неизвестную величину. Затем находим натяжение ленты в остальных точках через неизвестное натяжение в точке 1.
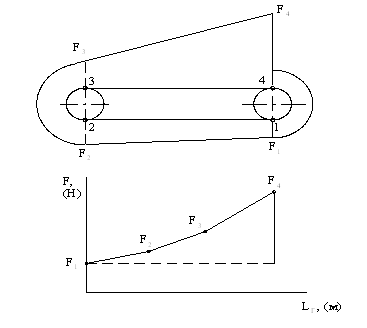
Рисунок 3 – Схема для определения натяжения ленты конвейера методом обхода контура по точкам.
Находим натяжение ленты методом обхода контура по точкам в точке 2 [2]:
![]() ,(19)
,(19)
где F1 и F2 – натяжение ленты в соответствующих точках, кН;
Кωп – коэффициент сопротивления кручению, Кωп = 0,022;
![]()
в точке 3:
F3 = F2 + KδН · F2,(20)
где KδН – коэффициент сопротивления на натяжном барабане, KδН = 0,05;
F3 = (1 + 0,05) · (F1 +-0,637) = 1,05 · F1 - 0,669;
в точке 4:
![]() ,(21)
,(21)
где Kωж – коэффициент сопротивления движению ленты по желобчатым роликоопорам, Kωж = 0,025;
![]() = 1,05 · F1 + 8,631.
= 1,05 · F1 + 8,631.
F4 = F1 · ef·α(22)
1,05 · F1 + 8,631 = F1 · 2,710,35·3,14
F1 · 2,99 - F1 · 1,05 = 8,631
F1 · (2,99 – 1,05) = 8,631
F1 · 1,94 = 8,631
![]() = 4,45 кН.
= 4,45 кН.
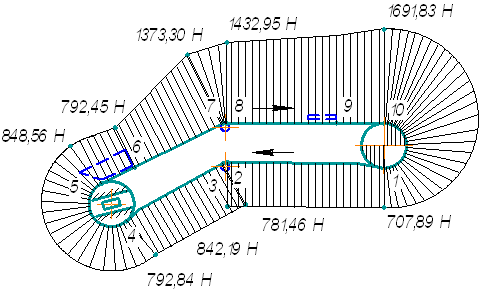
F2 = 4,45 - 0,637 = 3,813 кН
F3 = 1,05 · 4,45 – 0,669 = 4 кН
F4 = 1,05 · 4,45 + 8,631 = 13,3 кН
2.4 Уточненный расчет конвейера
2.4.1 Проверка провисания ленты между роликоопорами
Наибольший прогиб ленты будет в точке 3 и он определяется по формуле [2]:
![]() ,(23)
,(23)
где Imax – наибольший прогиб ленты, м;
F3 – натяжение ленты в точке 3, Н;
![]() = 0,011 м.
= 0,011 м.
Допустимый прогиб определяется по формуле [2]:
[Imax] = (0,025 ÷ 0,03) · Ip,(24)
[Imax] = (0,025 ÷ 0,03) · 0,72 = 0,018 ÷ 0,0216 м.
[Imax]> Imax , следовательно, натяжение ленты достаточное.
2.4.2 Определение уточненного тягового усилия на приводном барабане
Находим тяговое усилие на приводном барабане по формуле [2]:
Fту = F4 – F1 + F4... 1;(25)
Fту = 13,3 – 4,45 + 0,03 · (13,3 + 4,45) = 9,383 кН.
2.4.3 Уточненная мощность приводной станции
Мощность приводной станции определяется по формуле [2]:
![]() ,(26)
,(26)
где η – КПД передачи механизма привода, η = 0,85;
![]() кВт.
кВт.
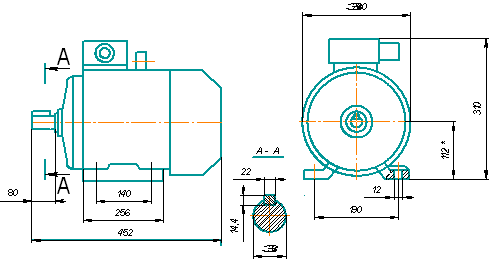
Выбираем электродвигатель переменного тока закрытого исполнения с повышенным пусковым моментом 4А180М8 мощностью 15 кВт и синхронной частотой вращения 750 об/мин.
2.5 Разработка приводной и натяжной станций
Частота вращения приводного барабана определяется по формуле [2]:
![]() ,(27)
,(27)
![]() 115 об/мин.
115 об/мин.
Находим передаточное отношение по формуле [2]:
![]() ,(28)
,(28)
где nдв – частота вращения двигателя, об/мин;
nдв = nc – s · nc,(29)
где nc – синхронная частота вращения двигателя, nc = 750 об/мин;
s – скольжение двигателя, s = 2,5% = 0,025;
nдв = 750 – 0,025 · 750 = 731,25 об/мин.
![]() .
.
Крутящий момент на валу барабана определяем по формуле [2]:
![]() ,(30)
,(30)
![]() Н·м.
Н·м.
Принимаем схему натяжной станции – грузовое натяжное устройство.
Определяем натяжное усилие по формуле [2]:
GНГ = 1,1 · (F2 + F3 + Fполз),(31)
где GНГ – натяжное усилие, кН;
F2 – натяжение в точке 2, F2 = 3,813 кН;
F3 – натяжение в точке 3, F3 = 4 кН;
Fполз – сопротивление при передвижении в ползунах натяжного барабана.
Fполз = (100 ÷ 250) · Н;(32)
при Н = 6,24 Fполз = (100 ÷ 250) · 6,24 = 624 ÷1560;
GНГ = 1,1 · (3,813 + 4 + 1,56) = 9,373 кН.
2.6 Расчет редуктора приводного барабана
2.6.1 Кинематический расчет

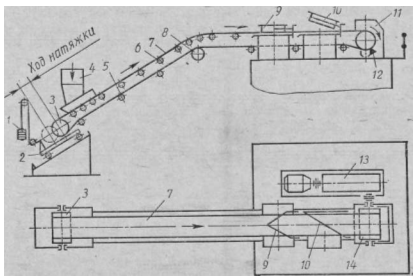
1 – электродвигатель; 2 – муфта; 3 – быстроходный вал; 4 – тихоходный вал; 5 – барабан; 6 – зубчатые зацепления.
Рисунок 4. Кинематическая схема привода ленточного конвейера.
Общий КПД привода определяем по формуле [3, с. 184]:
![]() ,(33)
,(33)
где η1 – КПД пары зубчатых колес, η1 = 0,98;
η0 – КПД, учитывающий потери на трение в подшипниках, η0 = 0,99;
![]() = 0,93.
= 0,93.
Требуемая мощность двигателя определяется по формуле [3, с. 184]:
![]() ,(34)
,(34)
где Рб – мощность на валу барабана, Рб = 15 кВт;
η – общий КПД привода, η = 0,93;
![]() кВт.
кВт.
Находим угловую скорость барабана по формуле [3, с. 184]:
![]() ;(35)
;(35)
![]() 12 рад/с.
12 рад/с.
Мощность на промежуточном валу определяем по формуле [3, с. 185]:
Р2 = Р1 · ![]() · η1,(36)
· η1,(36)
Р2 = 15 · 0,992 · 0,98 = 14,4 кВт.
Частота вращения на ведомом валу определяется по формуле [3, с.185]:
![]() ,(37)
,(37)
![]() 115 об/мин.
115 об/мин.
Угловая скорость на ведомом валу [3, с.185]:
![]() ,(38)
,(38)
![]() 12 рад/с.
12 рад/с.
Угловая скорость двигателя по формуле [3, с.185]:
![]() ,(39)
,(39)
![]() 76,54 рад/с.
76,54 рад/с.
Общее передаточное число по формуле [3, с.185]:
![]() ,(40)
,(40)
![]() ,
,
Частные передаточные числа можно принять для редуктора по ГОСТ 20758 – 75 [3, с.30] u = 6,3.
Похожие работы
... 956;=0,25 – коэффициент сцепления между прорезиненной лентой и стальным барабаном α=200º=3,49 рад – принятый угол обхвата барабана лентой. 4. Проверочный расчет ленточного конвейера По уточненному значению проверяем прочность ленты. Требуемое число прокладок: (3.1) Диаметр приводного барабана по давлению ленты на барабан: (3.2) где – ...
... направлении, конец стопорной ленты будет захвачен лентой и затянут между лентой и барабаном, чем обеспечивается торможение барабана и остановка ленты конвейера. 1.2. Установка и монтаж ленточных конвейеров. Передвижные конвейеры перед транспортированием с одного объекта эксплуатации на другой частично демонтируют. Для перевода машины в транспортное положение снимают ленту и, разбирая ...
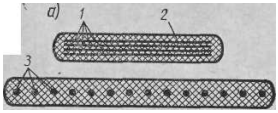
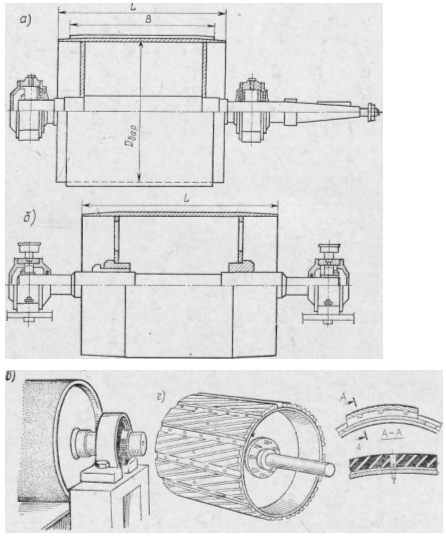
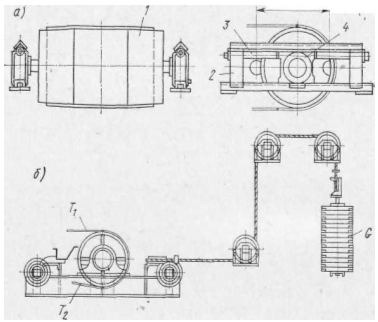
... температур окружающей среды. Рис.2 Резинотканевая и резинотросовая конвейерная ленты Так же широко распространены: ленты с перегородками, гофрированными выступами и бортами, трубчатые и др. 1.1.2 Барабаны В ленточных конвейерах различают приводные, концевые, натяжные и отклоняющие, служащие для изменения направления движения ленты, барабаны (рис.3). Чем больше диаметр барабана, тем ...
... целью увеличения производительности конвейера и уменьшения потерь транспортирующего груза. Рисунок 2. Желобчатая роликовая опора. ОПРЕДЕЛЕНИЕ ШИРИНЫ ЛЕНТЫ В ИЗ УСЛОВИЯ ОБЕСПЕЧЕНИЯ ЗАДАННОЙ ПРОИЗВОДИТЕЛЬНОСТИ (ПРОЕКТНЫЙ РАСЧЕТ) Для конвейера с желобчатой формой роликооопор с углом наклона боковых роликов 20 0 ширины ленты по формуле: , (1.1) где Q – массовая производительность, т/ч; ...
0 комментариев