Определение допускаемых напряжений
Подбор основных параметров передачи
Проверочный расчет передачи на контактную прочность
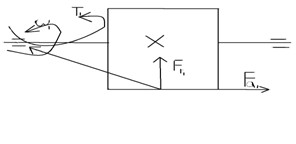
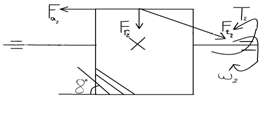
Силы в зацеплении
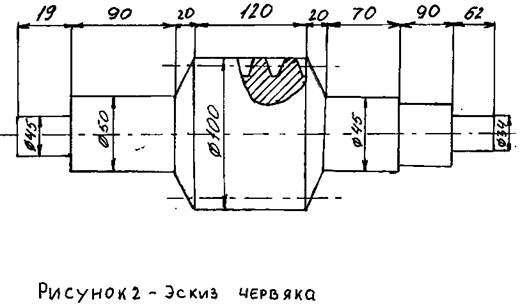
Определение размеров отдельных участков валов для построения компоновочной схемы
Расчет компенсирующей муфты
Выбор типа нормального сечения клинового ремня
Уточняем межосевое расстояние передачи
Необходимое число ремней с учетом неравномерности распределения нагрузки между ремнями
Конструирование червячного редуктора
Поправка обмятие микронеровностей
Мкм < 195 мкм)
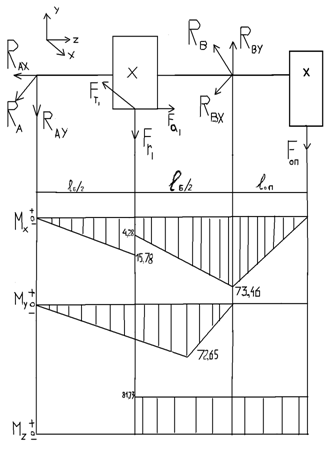
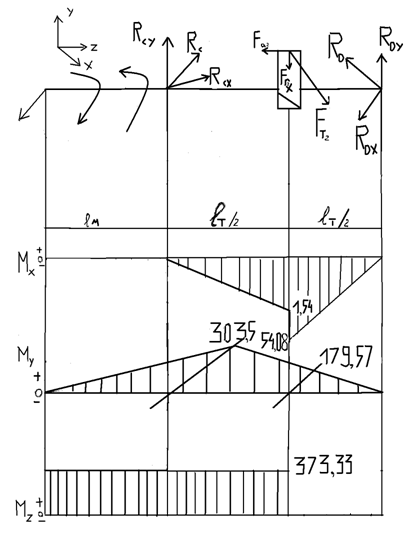
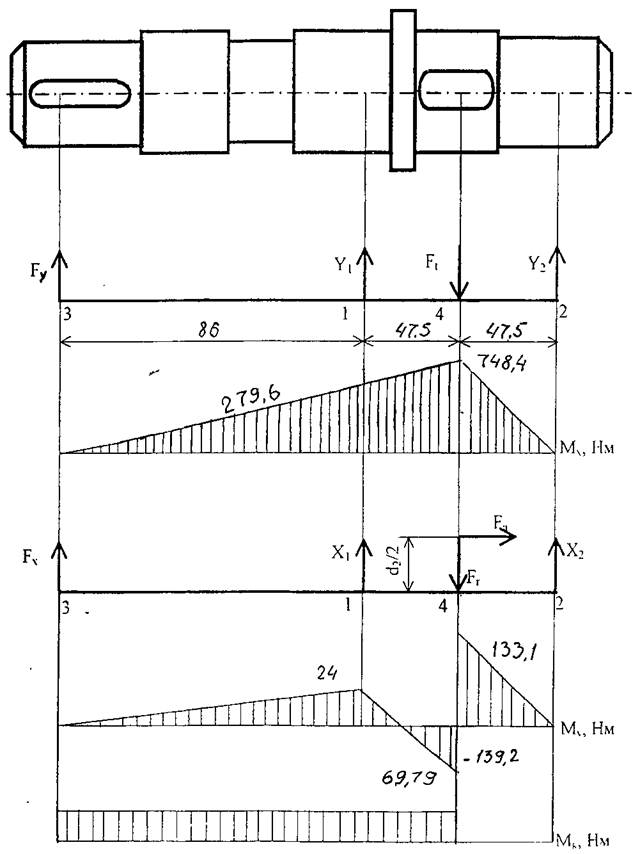
Определение реакций опор
Расчет вала червячного колеса
Подбор подшипников
Опора Б
Подбор подшипников для вала червячного колеса
Выбор посадок колец подшипников
Выходной вал
Расчет сечения Д на сопротивление усталости
Расчет сечения Г на статистическую прочность
Смазывание и уплотнения
Навигация
Проектирование редуктора
Проектирование редуктора
46223
знака
1
таблица
15
изображений
Введение
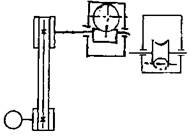
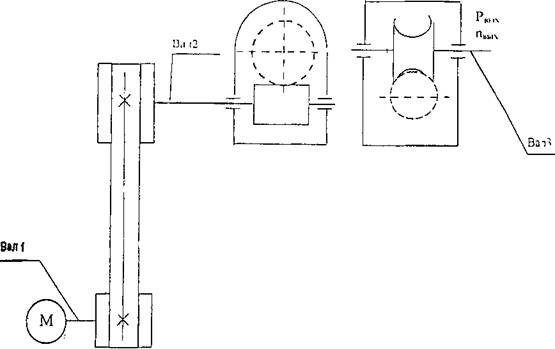
Редуктором называется механизм, состоящий из зубчатых или червячных передач, выполненный в виде отдельного агрегата и служащий для передачи вращения от вала двигателя к валу рабочей машины. Кинематическая схема привода может включать, помимо редуктора, открытые зубчатые передачи, цепные или ременные передачи.
Назначение редуктора – понижение угловой скорости и соответственно повышение вращающего момента ведомого вала по сравнению с ведущим. Механизмы для повышения угловой скорости, выполненные в виде отдельных агрегатов, называют планетарными механизмами или мультипликаторами. Зубчатые редукторы имеют широкое применение, особенно в подъемно-транспортном, металлургическом, химическом машиностроении, в судостроении и т.д.
Редуктор проектируют либо для привода определенной машины, либо по заданной нагрузке (моменту на выходном валу) и передаточному числу без указания конкретного назначения.
Проектируемый привод предполагается эксплуатировать в закрытом, отапливаемом, вентилируемом, сравнительно чистом помещении, снабженным подводом переменного трехфазного тока. Привод предполагается нагружать кратковременно-повторно с умеренными нагрузками.
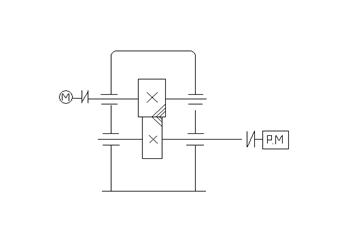
Данный механизм представляет собой одноступенчатый редуктор состоящий из червяка и неподвижно закрепленного на валу червячного колеса. Движение вращения передается на редуктор от электродвигателя через гибкую связь представляющую собой клиноременную передачу. На выходном валу редуктора жестко крепится компенсирующая муфта. Предполагаемый привод и электродвигатель необходимо неподвижно закрепить на плите.
Тип производства данного изделия – серийное.
1. Выбор электродвигателя и его кинематический расчёт
В настоящее время в машиностроении применяют двигатели постоянного и переменного тока. Поскольку двигатели постоянного тока нуждаются в источниках питания, дающих постоянный ток, или в преобразователях переменного тока в постоянный (т. к. общая сеть питается обычно переменным током), а так же имеют ряд других недостатков, исходя из которых они распространены значительно меньше, чем двигатели переменного тока. Поэтому выбираю двигатель переменного тока: трёхфазный, асинхронный электродвигатель с короткозамкнутым ротором, который не имеет скользящих контактов и непосредственно (без дополнительных устройств) включается в сеть.
1.1 Выбор электродвигателяИсходные данные: Потребляемую мощность привода Рпр = 2 кВт
Частота вращения привода nпр = 24 об/мин.
Срок службы привода t = 8000 час
Тогда требуемая мощность электродвигателя: P![]() = Рпр / hпр,
= Рпр / hпр,
где hпр – КПД привода, равный произведению КПД отдельных звеньев кинематической цепи.
hпр = hрем.* hчерв. * hмуф.
где hрем. – КПД ременной передачи, hчерв. – КПД червячной передачи, hмуф – КПД муфты.
hпр = 0,95*0,8*0,98 = 0,74
P![]() = 2/0,74 =2,7 кВт.
= 2/0,74 =2,7 кВт.
Электродвигатель должен иметь мощность Р![]()
![]() Р
Р![]()
Рекомендуемые передаточные числа:
Для ременной передачи U![]() = 2…4
= 2…4
Для червячной передачи U![]() = 16…50
= 16…50
Требуемая частота вращения вала электродвигателя:
n![]() = n
= n![]()
![]() U
U![]()
![]() U
U![]() =24 (2…4) (16…50)=768…4800 об/мин
=24 (2…4) (16…50)=768…4800 об/мин
По таблице ГОСТ 19523 – 74 выбираем электродвигатель АИР112МА6:
Р![]() = 3 кВт; n
= 3 кВт; n![]() = 950 об/мин
= 950 об/мин
1.2 Кинематические расчеты
Общее передаточное число привода: U![]() = n
= n![]() /n
/n![]() = 950/24 = 39,58
= 950/24 = 39,58
Примем передаточное число редуктора U![]() = 18, тогда U
= 18, тогда U![]() = U
= U![]() /U
/U![]() = 39,58/18 = 2,2
= 39,58/18 = 2,2
Частота вращения выходного вала редуктора: n![]() = n
= n![]() =24 об/мин
=24 об/мин
Частота вращения входного вала: n![]() = n
= n![]()
![]() U
U![]() = 24
= 24![]() 18 = 432 об/мин
18 = 432 об/мин
Крутящий момент на приводном валу:
T![]() = T
= T![]() = (9550
= (9550![]() P
P![]() )/n
)/n![]() = (9550
= (9550![]() 2)/24 = 795,83 (Н ´ м).
2)/24 = 795,83 (Н ´ м).
Крутящий момент на входном валу редуктора:
Т![]() = Т
= Т![]() /(U
/(U![]()
![]()
![]() ) = 795,83/(18
) = 795,83/(18![]() 0,8) = 55,3 (Н ´ м).
0,8) = 55,3 (Н ´ м).
Крутящий момент на ведущем шкиве ременной передачи (на валу электродвигателя):
Т![]() = Т
= Т![]() /(U
/(U![]()
![]()
![]() ) = 55,3/(2,2
) = 55,3/(2,2![]() 0,95) = 27 (Н ´ м).
0,95) = 27 (Н ´ м).
С другой стороны:
Т![]() = (9550
= (9550![]() Р
Р![]() )/(n
)/(n![]()
![]() U
U![]()
![]()
![]() ) = (9550
) = (9550![]() )/(24
)/(24![]() 39,58
39,58![]() 0,74) = 27 (Н ´ м).
0,74) = 27 (Н ´ м).
2. Выбор материалов и определение допускаемых напряжений 2.1 Ожидаемая скорость скольжения в зацеплении
Исходные данные: производство – среднесерийное; срок службы – t=8000 ч; n![]() = 24 об/мин.
= 24 об/мин.
V![]() = 0,45
= 0,45![]() 10
10![]()
![]() n
n![]()
![]() U
U![]()
![]()
![]() = 0,45
= 0,45![]() 10
10![]()
![]() 24
24![]() 18
18![]()
![]() = 1,8 м/с.
= 1,8 м/с.
Похожие работы
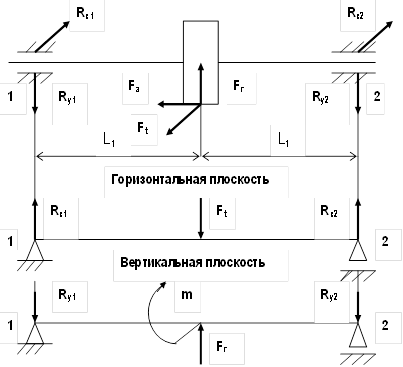
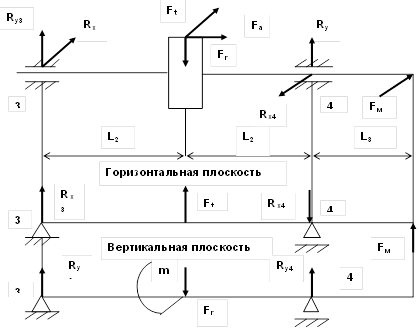
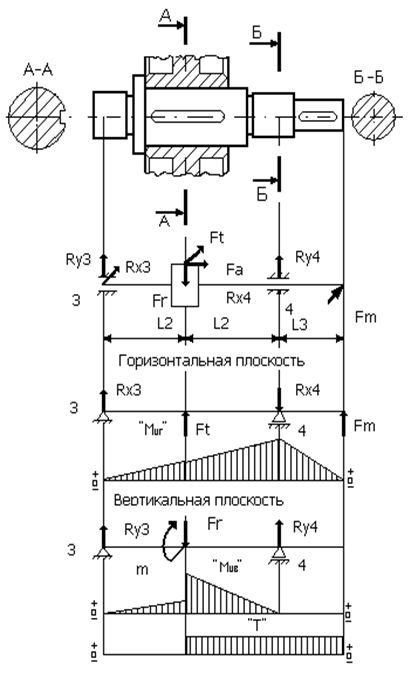
... в часах: где n1 –частота вращения ведущего вала редуктора. Ведомый вал несёт такие же нагрузки, как и ведущий: Fa=...H; Fr=...H; Ft=...H. Нагрузка на вал от муфты Fм=...Н. Из первого этапа компоновки: L2=...м. L3=...м. Составляем расчётную схему вала: Реакции опор: Горизонтальная плоскость Проверка: Вертикальная плоскость: Проверка: ...
... 5 установить в опоры скольжения корпуса поз.11. 7. Установить крышку поз12 и прикрутить ее винтами поз.15 и штифтами поз.20. Заключение В курсовом проекте спроектирован редуктор программного механизма. Все требования удовлетворены, и поставленные задачи выполнены. Достигнута необходимая точность работы устройства. В конструкции имеются унифицированные детали. Использованы типовые методы ...
... напряжения σэкв = 1, 3 Fр / А (109) σэкв = 1, 3 *1780, 08 / 84, 2 = 27, 48 Н/мм2 [σ] 27, 48 75 Проверить прочность стяжных винтов подшипниковых узлов быстроходного вала цилиндрического редуктора. Rу – большая из реакций в вертикальной плоскости в опорах подшипников быстроходного вала, Rу = 2256, 08 Н. Диаметр винта d2 = 12 мм, шаг резьбы Р = 1, 75 мм. Класс прочности 5.6 ...

... для решения данной задачи является редуктор, который представляет систему зубчатых передач выполненных в герметично закрытом корпусе. Заданием данного курсового проекта является спроектировать червячный редуктор общего назначения, предназначенный для длительной эксплуатации и мелкосерийного производства. 2. Расчётная часть. 2.1. Кинематический расчёт и выбор эл. двигателя При ...
0 комментариев