Анализ недостатков существующего оборудования для финишной обработки
Современные методы повышения долговечности деталей
Сущность холодной пластической деформации металлов
Явления, происходящие в поверхностном слое при обработке ППД
Шероховатость поверхности
Напряжения
Цель и задачи дипломного проекта
Режимы обкатывания
Подача
ОБОСНОВАНИЕ ТЕХНИЧЕСКОЙ ХАРАКТЕРИСТИКИ СТАНКА
Расчет зубчатой передачи
Расчет критической частоты вращения эталон-вала
Расчет ременной передачи
Рычаг зажима шатунных шеек
Обоснование самоустановки накатных роликовых головок
Расчет накатной роликовой головки
Кинематический расчет
Синхронизация движений параллельно работающих гидроцилиндров
Роликовые головки
ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ПРОЕКТА
Расчет необходимого количества оборудования
Расчет капитальных вложений
Калькуляция себестоимости обработки детали на операции
Навигация
Обоснование самоустановки накатных роликовых головок
Модернизация станка Nagel
120425
знаков
10
таблиц
11
изображений
4.2.3 Обоснование самоустановки накатных роликовых головок
При применении обкатывающих роликов с прямолинейной образующей необходима их тщательная установка и трудоемкая выверка на параллельность образующих заготовки и ролика. Неточная установка или нарушение ее в процессе работы под нагрузкой в результате деформации в системе станок – приспособление – инструмент - деталь приводят к образованию недоброкачественной поверхности. С целью устранения необходимости тщательной выверки предлагается применить схему с самоустановкой ролика, автоматически устраняющей перекосы [26]. Под действием момента, возникающего при перекосах, ролик, имеющий свободу поворота вокруг оси, перпендикулярной к линии контакта его с заготовкой, поворачивается до восстановления равномерного контакта по всей длине образующей. Свободный поворот реализуется с помощью упорного подшипника, который необходимо рассчитать на статическую грузоподъемность.
Эквивалентная статическая нагрузка на подшипник [1]:
Рэ = Fr, (82)
где Fr – радиальная нагрузка на подшипник, равная усилию обкатывания, Fr=7250 Н.
Требуемая статическая грузоподъемность:
С = f × Рэ, (83)
где f – коэффициент надежности, f = 2.
С = 2×7250 (Н).
Принимаем для эксплуатации шариковый упорный одинарный подшипник 8104, статическая грузоподъемность которого С = 21600 н.
Действительная долговечность подшипника рассчитаем по формуле:
 , (84)
, (84)
![]() (млн.об).
(млн.об).
Долговечность подшипника в часах по формуле:
![]() , (85)
, (85)
![]() (тыс.ч).
(тыс.ч).
4.2.4 Выбор устройств, обеспечивающих регулирование давления
Для изменения усилия зажима обрабатываемой детали предлагается применить схему дифференциально-дроссельного регулирования [11]. Такая схема характеризуется постоянным подводом расхода масла и в этом случае применяется параллельный монтаж дросселя и гидроцилиндра. Дроссель для малых скоростей перемещения (до 1 м/мин) монтируют на выходе гидроцилиндра, в таком случае обеспечивается более равномерное изменение регулируемых параметров. Давление в цилиндре изменяется соответственно профилю проходного отверстия дросселя, при этом от нуля до максимума изменяется и мощность гидроцилиндра. Особенность дифференциально-дроссельного регулирования в том, что используют золотник с двумя сопротивлениями или два дросселя. Это необходимо для реверсирования гидроцилиндра сопротивлением дросселя. При наибольшем сопротивлении дросселя поршень будет перемещаться с наибольшей скоростью (быстрый отвод), при среднем положении поршень находится в равновесном состоянии, при минимальном сопротивлении будет достигаться максимальное давление. Такая схема широко распространена в агрегатных, копировальных станках, имеющих системы автоматического регулирования, а также в гидроустройствах, где требуется периодическое изменение подводимого давления к гидроприводу – зажимные устройства, фрикционные муфты [11].
Достоинства применяемой схемы – малое влияние объемных потерь: поскольку обе полости поршня находятся под давлением, нет надобности в реверсирующем механизме, исключено образование вакуума.
4.2.5 Расчет опорной роликовой головки
В качестве опорных роликов в опорной роликовой головке принимаем игольчатые подшипники, вращающиеся с частотой вращения обрабатываемой детали. Их необходимо рассчитать на динамическую грузоподъемность (рис. 5).
Исходные данные:
- необходимо подобрать радиальный игольчатый роликоподшипник с номинальной долговечностью Lh = 15000 ч;
- усилие обкатывания Робк = 7250 Н;
- характер нагрузки на подшипник – толчки и вибрация;
- частота вращения n = 127 об/мин.
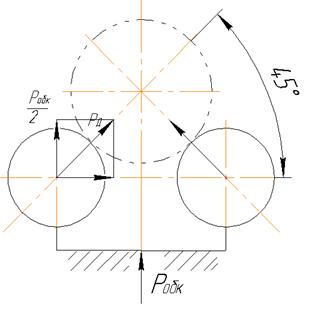
Рис. 5 - Расчетная схема
Эквивалентная нагрузка на подшипник:
![]() ,
,
где n – число подшипников в роликовой головке, n = 2 шт.
![]() (Н).
(Н).
Требуемая динамическая грузоподъемность по формуле:
С = Кс × Рд, (86)
где Кс – коэффициент грузоподъемности, Кс = 2,2.
С = 2,2 × 5130 = 11286 (Н).
Принимаем подшипник сверхлегкой серии 4 074 904 ГОСТ 4657-71, динамическая грузоподъемность которого С = 12000 Н.
Действительная долговечность подшипника по формуле (84):
 ,
,
![]() (млн.об).
(млн.об).
Долговечность подшипника в часах по формуле (85):
![]() ,
,
![]() (тыс.ч).
(тыс.ч).
0 комментариев