Анализ недостатков существующего оборудования для финишной обработки
Современные методы повышения долговечности деталей
Сущность холодной пластической деформации металлов
Явления, происходящие в поверхностном слое при обработке ППД
Шероховатость поверхности
Напряжения
Цель и задачи дипломного проекта
Режимы обкатывания
Подача
ОБОСНОВАНИЕ ТЕХНИЧЕСКОЙ ХАРАКТЕРИСТИКИ СТАНКА
Расчет зубчатой передачи
Расчет критической частоты вращения эталон-вала
Расчет ременной передачи
Рычаг зажима шатунных шеек
Обоснование самоустановки накатных роликовых головок
Расчет накатной роликовой головки
Кинематический расчет
Синхронизация движений параллельно работающих гидроцилиндров
Роликовые головки
ЭКОНОМИЧЕСКАЯ ЭФФЕКТИВНОСТЬ ПРОЕКТА
Расчет необходимого количества оборудования
Расчет капитальных вложений
Калькуляция себестоимости обработки детали на операции
Навигация
Расчет накатной роликовой головки
Модернизация станка Nagel
120425
знаков
10
таблиц
11
изображений
4.2.6 Расчет накатной роликовой головки
В качестве опорных роликов в головке накатной аналогично головке опорной используются игольчатые подшипники, вращающиеся с частотой вращения обрабатываемой детали. Необходимо составить расчетную схему и показать зависимость между действующими силами, после чего проверить подшипники на динамическую грузоподъемность (рис. 6).
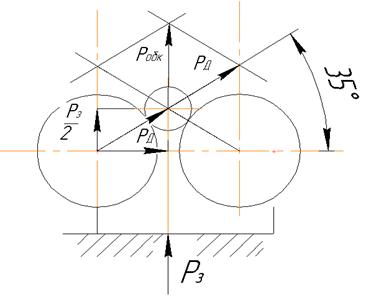
Рис. 6 - Расчетная схема
Уравнения действующих сил таковы:
![]() , (87)
, (87)
где Рз – усилие, с которым рычаг действует на накатную головку, Н;
Рд – усилие, с которым опорный ролик действует на накатной ролик, Н.
![]() , (88)
, (88)
где Робк – усилие, с которым накатной ролик действует на заготовку (усилие обкатывания), Н.
Подставив уравнение (87) в уравнение (88), имеем:
![]()
Таким образом, получаем, что накатной ролик действует на деталь с тем же усилием, что и рычаг на накатную головку. Головка роликовая накатная конструктивно подобна головке опорной, поэтому в качестве подшипников принимаем игольчатые роликоподшипники 4 074 904 ГОСТ 4657-71.
Эквивалентная нагрузка на подшипник по формуле (87):
![]() ,
,
![]() (Н).
(Н).
Требуемая динамическая грузоподъемность по формуле (86):
С = Кс × Рд,
где Кс – коэффициент грузоподъемности, Кс = 1,7.
С = 1,7 × 6320 = 10744 (Н).
Принимаем для эксплуатации подшипник сверхлегкой серии 4 074 904 ГОСТ 4657-71, динамическая грузоподъемность которого С = 12000 Н.
Действительная долговечность подшипника по формуле (84):
 ,
,
![]() (млн.об).
(млн.об).
Долговечность подшипника в часах по формуле (85):
![]() ,
,
![]() (тыс.ч).
(тыс.ч).
4.3. Расчет устройства подъема заготовки
4.3.1 Силовой расчет
Уравнение моментов относительно т. О для положения 1:
![]()
G×R×cos45°+Mтр1-Fт1×96=0, (89)
где G – вес перемещаемых частей устройства подъема, приблизительно G=500 Н;
Мтр1 – момент трения, возникающий в опорах скольжения, Н∙м;
R – конструктивный размер устройства подъема, R=172 мм;
Fт1 – тяговое усилие, Н.
Уравнение моментов относительно т.О для положения 2:
![]()
G×R×cos65°+Mтр2-Fт2×63=0 (90)
Момент трения в опорах скольжения:
![]() , (91)
, (91)
где n – число точек приложения силы нормального давления, n=2 точки;
r – радиус опоры в месте приложения силы, принимается r=30×10-3 м;
N – сила нормального давления, в худшем случае N=G=500 Н;
fк – коэффициент трения скольжения, fк=0,02.
Решая уравнения (89) и (90) относительно Fт и сравнив результат, определим минимально необходимое тяговое усилие на штоке гидроцилиндра.
Используя уравнение (89), имеем:
![]() (Н)
(Н)
Используя уравнение (90), имеем:
![]() (Н)
(Н)
Т.о. принимается за минимально необходимое тяговое усилие Fт=700 Н.
4.3.2 Погрешность позиционирования
Допустимая погрешность установки заготовки:
![]() , (92)
, (92)
где B – ширина шейки коленчатого вала, B=28,6 мм;
b – ширина роликовой головки, b=26,5 мм;
k – коэффициент запаса, k=1,2.
![]() (мм).
(мм).
Точность позиционирования устройства подъема зависит от технических характеристик применяемого датчика положения, в том числе от его разрешающей способности. За последнее время разработано несколько новых типов потенциометрических датчиков, обладающих следующими достоинствами:
- отсутствием ступенчатого выходного напряжения;
- большим сроком службы и надежностью в работе (т.к. отсутствует скользящий токосъемный контакт);
- большой точностью;
- возможностью эксплуатации при больших температурах.
Принцип действия фотоэлектрического потенциометра основан на поверхностном эффекте фотоэлектрической проводимости. Предназначен датчик для регистрации механического перемещения и преобразования его в электрический сигнал. Разрешающая способность потенциометрических бесконтактных датчиков составляет ∆=0,1 мм, что вполне удовлетворяет рассчитанной погрешности установки.
Т.о. принимаем в качестве датчика положения бесконтактный потенциометрический выключатель ВКБП 05 ТУ 37.459.088-86.
0 комментариев