Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
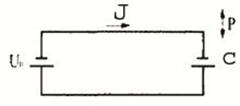
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Аксоидные поверхности
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
3.3. Аксоидные поверхности.
3.3.1. Мгновенные оси и аксоидные поверхности. Сложное движение звена можно представить последовательностью мгновенных поворотов вокруг мгновенных осей, меняющих свое положение в пространстве (рис.3.4) . Последовательные положения мгновенных осей в системах координат K (неподвижной) и K' (подвижной) образуют две аксоидные поверхности - неподвижную и подвижную, в каждый момент времени контактирующие друг с другом по прямой линии - мгновенной оси. В общем случае аксоиды катятся друг по другу со скольжением. Формы аксоидных поверхностей определяются видами переносного и относительного движений.
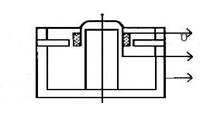
3.3.2. Гиперболоидные аксоиды. Переносное движение совершается вокруг оси omega1, относительное - вокруг оси omega2, оси скрещиваются под углом Sigma (рис. 3.5 и 3.6) . Мгновенная ось - Omega, вдоль нее
аксоиды проскальзывают со скоростью v . Расстояние O1O2 = a, углы delta1
и delta2 определяют по формулам:
a = (v/Omega) [ (1+ 2i*cos (Sigma) + i**2) / (i*sin (Sigma) )], (3.5)
где Omega = omega1 + omega2 ; i = omega1/omega2 ;
O1P/O2P = 1/ (i*cos (Sigma) = (omega2/omega1) /cos (Sigma) ; (3.6)
delta1 = arc tg [sin (Sigma) / (i*cos (Sigma) ] ;
delta2 = Sigma - delta1 . (3.7)
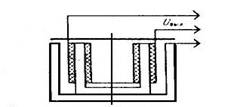
3.3.3. Конические аксоиды. Оси вращательных движений пересекаются, аксоиды перекатываются друг по другу без скольжения (рис. 3.7) .
Углы при вершинах конусов delta1 и delta2 определяют по формулам (3.7) .
3.3.4. Цилиндрические аксоиды. Оси вращательных движений параллельны (рис. 3.8, а - при одинаковых знаках omega1 и omega2, б - при разных) . Цилиндры катятся друг по другу без скольжения; положение мгновенной оси определяют по формуле (3.6) при Sigma = 0:
O1P/O2P = omega2/omega1 . (3.8)
3.3.5. Сложение поступательных движений (рис.3.9) . Поверхность неподвижного аксоида вырождается в траекторию перемещения центра подвижной системы координат K', в которой звено движется поступательно.
3.4. Мгновенные центры скоростей и ускорений.
3.4.1. Мгновенный центр скоростей в плоском движении звена точка, линейная скорость которой в данный момент равна нулю. Для плоского движения - это проекция мгновенной оси на плоскость движения (рис. 3.10) .
Для точек звена выполняется условие
(v)a/AP = (v) b/BP = ... = omega, (3.9)
где omega - угловaя скорость звена; P - мгновенный центр.
При плоском движении аксоиды проецируются на плоскость в виде центроида - геометрических мест мгновенных центров скоростей.
3.4.2. Мгновенный центр ускорений в плоском движении - точка, линейное ускорение которой в данный момент равно нулю.
Из (3.2) для любой точки звена (рис. 3.11) следует:
(w)a/AQ = (w) b/BQ = ... = [eps**2 + omega**4]**0.5,
где eps - угловое ускорение звена; Q - мгновенный центр.
Направление на мгновенный центр ускорений определяется углом между векторами нормального (w) n и полного w ускорений.
Глава 4. КИНЕМАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ МЕХАНИЗМОВ
4.1. Кинематические характеристики механизмов.
4.1.1. Кинематические характеристики - зависимости, связывающие в М положения, скорости и ускорения ведущего звена с соответствующими параметрами ведомого. Эти функции полностью определяются структурой и геометрическими параметрами М.
4.1.2. Функция положения М - зависимость положения ведомого звена от положения ведущего. В общем виде для М (рис. 4.1) :
fin = П (fi1) . (4.1)
4.1.3. Функция скорости М - связь скоростей ведомого звена omegan и ведущего omega1 - производная функции положения:
dfin/dtau = d[П (fi1) ]/dtau = {d[П (fi1) ]/dfi1}* (dfi1/dtau),
d[П (fi1) ]/dfi1= П' (fi1) = omegan/omega1 . (4.2)
Передаточное отношение - величина, обратная функции скорости:
(i)1n = omega1/omegan = 1/П' (fi1) . (4.3)
4.1.4. Функция ускорения М - связь ускорений ведомого звена epsn и ведущего eps1 - вторая производная функции положения:
d2fin/dtau2 = d|{d[П (fi1) ]/dtau}* (dfi1/dtau) |/dtau =
= П'' (fi1) * (dfi1/dtau) **2 + П' (fi1) * (d2fi1/dtau2) =
= П'' (fi1) **omega1**2 + П' (fi1) *eps1 ;
Если принять eps1 = 0, то
П'' (fi1) = d2[П (fi1) ]/dfi12 = epsn/omega1**2 . (4.4)
Следовательно, функция ускорения определяет ускорение ведомого звена М при постоянной скорости ведущего.
4.2. Методы определения кинематических характеристик.
4.2.1. Метод векторного замкнутого контура. Сущность этого аналитического метода: звенья М представляют векторами, которые должны образовать замкнутый контур, т.е. сумма проекций звеньев- векторов на оси произвольно выбранной системы координат должна быть равна нулю.
Уравнение проекций позволяет найти функцию положения, а дифференцирование ее даст функции скорости и ускорения. Для М на рис. 4.2 уравнения проекций на оси X и Z :
r*cos (fi1) + l*cos (fi2) - s = 0;
h + r*sin (fi1) - l*sin (fi2) = 0.
Функция положения
dzet = s/r = cos (fi1) +
+ [ (l/r) **2 - (h/r + sin (fi1) )**2]**0.5 (4.5)
Функции скорости и ускорения:
П' (fi1) = ddzet/dfi1 = v3/ (r*omega1) ;
П'' (fi1) = d2dzet/dfi12 = w3/ (r*omega1**2) .
4.2.2. Графоаналитический метод планов. Сущность его состоит в построении векторных диаграмм, изображающих скорости и ускорения М для одного его положения, т.е. получают мгновенные значения кинематических характеристик М. Исходным является план положений М - изображение М в масштабе при некотором положении ведущего звена (рис. 4.3 а) .
План скоростей - графическое решение векторных уравнений, связывающих скорости абсолютного, переносного и относительного движений точек звеньев (рис. 4.3 б) . Аналогично строится план ускорений (рис. 4.3 в) .
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев