Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
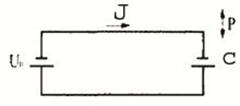
5.3.2. Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис.
5.2) . Усилия полезного сопротивления приложены к выходному звену М, движущие - к входному, ведущему.
5.3.3. Силы веса. Возникают в поле тяготения, пропорциональны массе звена m и ускорению тяжести g : G = m*g . Условно приложены в центре масс - точке, в которой может сосредоточена вся масса звена, причем состояние его под действием сил не изменяется. Координаты центра масс для тела с обьемом V (рис. 5.3) :
(x)c = (1/V) *int (x*dv) V; (y) c = (1/V) *int (y*dv) V;
(z)c = (1/V) *int (z*dv) V . (5.4)
Для плоского сечения площадью S координаты центра масс:
(x)c = (1/S) *int (x*ds) S; (y) c = (1/S) *int (y*ds) S . (5.5)
5.3.4. Инерционные параметры звеньев: масса при поступательном движении и моменты инерции при вращательном - меры инерционности звеньев. Моменты инерции определяют относительно соответствующей координатной оси: Jx, Jy, Jz, или относительно какой-либо точки - Ja ; в последнем случае Ja = Jxa + Jya + Jza . Момент инерции относительно оси, проходящей через центр масс, называют главным моментом инерции.
Для тела обьемом V с равномерно распределенной массой момент инерции
J = int (ro**2*dm) V, (5.6)
где ro - радиус вращения элементарной массы dm.
Моменты инерции некоторых тел относительно осей, проходящих через центры масс:
- шара массой m и радиусом R:
Jc = 0.4*m*R**2 ;
- цилиндра массой m и радиусом R, относительно оси, прохо дящей через центр масс и параллельной образующей:
Jc = 0.5*m*R**2 ;
- тонкого стержня длиной L и массой m, относительно оси, проходящей через центр масс и перпендикулярной продольной оси стержня:
Jc = (m*L**2) /12 .
Момент инерции относительно оси, удаленной от центра масс на расстояние a (рис. 5.4) :
Ja = Jc + ma**2 .
5.3.5. Инерционные усилия. Возникают при действии ускорений, пропорциональны этим ускорениям и массе звена или моменту инерции.
Сила инерции: Fи = -m* (w)c, условно приложена в центре масс и пропорциональна его ускорению (w) c.
Момент инерционной силы: Tи = -Jc* (eps) c, где (eps) c - угловое ускорение, Jc - момент инерции относительно центра масс.
В сложном движении, представляющем сумму поступательного и вращательного, на тело действует инерционная сила Fи и момент инерционной силы Ти (рис. 5.5) .
5.3.6. Реакции в кинематических парах. Взаимно уравновешенные усилия взаимодействия звеньев в подвижных соединениях. Реакцию можно представить как сумму нормальной (R) n и касательной (R) t (рис. 5.6) .
Касательная - сила трения, сопротивление тангенциальному смещению поверхностей - функция нормальной силы.
5.4. Краткая характеристика сил трения.
5.4.1. Трение имеет двойственную молекулярно - механическую природу, зависит как от взаимодействия молекулярных структур поверхностных слоев, так и от их механического сцепления. Силы трения зависят от четырех групп факторов:
а) вида трения - скольжения или качения;
б) свойств поверхностных слоев контактирующих деталей;
в) режима трения;
г) формы поверхностей кинематической пары.
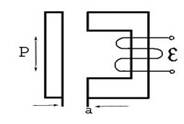
5.4.2. Виды трения. Трение скольжения-процесс, при котором одни и те же зоны первой контактирующей поверхности приходят в соприкосновение с новыми зонами другой (рис. 5.7) .
Углы при трении: gamma - угол давления; fit - угол трения. Коэффициент трения f = tg (fit) .
Fт = (R) t = (R) n*tg (fit) = f* (R)n . (5.7)
В трущейся паре может возникнуть самоторможение, когда движение под действием внешней силы P невозможно, как бы велика она ни была, т.к. при этом P < Fт ; условие самоторможения можно записать в виде: gamma < < fit .
Трение качения - процесс, при котором все новые зоны обеих контактирующих поверхностей вступают в контакт, а мгновенная ось вращения проходит через зону контакта (рис. 5.8, а) . При качении нормальная составляющая реакции сдвинута относительно нормали, проходящей через середину зоны контакта на расстояние k, которое называют коэффициентом трения качения (рис. 5.8, б) .
5.4.3. Вторая группа факторов, определяющая физико-механическое и микрогеометрическое состояние контактирующих поверхностей: молекулярное строение, структура поверхностного слоя, внутренние напряжения в нем, твердость, упругость и другие механические свойства; микрорельеф, присущий каждой технической поверхности, и другие. В частности, микрорельеф, согласно ГОСТ 2789-73, описывается десятью параметрами, среди которых, кроме параметров, характеризующих высоту и шаг микронеровностей, должны быть их форма и направление "в плане".
5.4.4. Третья группа факторов - режим трения: удельное давление, относительные скорости, температура в контактных зонах, наличие или отсутствие на поверхностях трения оксидов или смазочных материалов, свойства этих третьих веществ.
Коэффициенты трения скольжения и качения, учитывающие влияние первых трех групп факторов, исследованы экспериментально и приведены в справочниках, для плоских поверхностей при скольжении и для плоской и цилиндрической - при качении.
5.4.4. Влияние формы контактирующих поверхностей. Учитывается введением приведенных коэффициентов трения: отношения внешних сил движущей P и сжимающей контактирующие поверхности N: f' = P/N. При наличии трения силу P находят через f' :
P = Fт = f'*N, (5.8)
где Fт - приведенная сила трения в кинематической паре.
При качении
P = k*N/r = f'*N,
где f' = k/r - приведенный коэффициент трения качения.
Глава 6. Методы определения реакций в кинематических парах и динамика механизма..
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев