Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
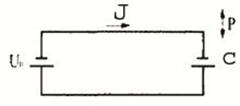
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Соотношение скоростей в высших кинематических парах
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
4.3. Соотношение скоростей в высших кинематических парах.
4.3.1. Эти соотношения необходимо определять при анализе и синтезе сложных М с высшими парами. В таких парах звенья в общем случае катятся друг по другу со скольжением. Относительное движение звеньев можно представить, введя в рассмотрение подвижные аксоиды, жестко связанные со звеньями пары.
4.3.2. Кинематическая пара с вращательным движением звеньев.
Звенья вращаются вокруг осей O1 и O2, контактируя в точке K (рис. 4.4) .
Чтобы определить положение мгновенной оси, условно останавливают одно из звеньев, например звено 1, придавая ему и всем остальным скорость - (omega1) . Скорость звена 2 Omega = omega2 - omega1 определит относительное движение, а скорость вращения линии O1O2 (т.е. стойки) - (omega1) - переносное. В соответствии с (3.8) мгновенная ось находится в точке Р, для которой O1P/O2P = omega2/omega1 . Профили звеньев проскальзывают со скоростью vs, которая должна определяться расстоянием до мгновенной оси: vs = Omega*KP = (omega2 - omega1) *KP. Поэтому полюс Р должен находиться на нормали, проведенной к контактирующим профилям звеньев в точке контакта К (рис. 4.4) .
4.3.3. Кинематическая пара с вращательным движением одного звена и поступательным второго. Положение мгновенной оси может быть получено так же, как и в предыдущем случае: из точки контакта К проводят нормаль до пересечения с прямой, исходящей из центра O1 перпендикулярно к направлению линейной скорости v2 звена 2 (рис. 4.5) .
Линейное движение можно считать вращательным вокруг бесконечно удаленного центра, поэтому O2P бесконечно велико, и omega2 = 0. Так как omega2*O2P = v2, следовательно:
O1P*omega1 = v2 . (4.6)
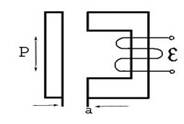
4.3.4. Поступательное движение обоих звеньев. Касательная (рис. 4.6) к профилям звеньев определяет углы alf1 и alf2 между скоростью скольжения vs и скоростями v1 и v2 :
v1/v2 = sin (alf2) /sin (alf1) . (4.7)
4.4. Кинематические характеристики многозвенных механизмов.
4.4.1. Структура многозвенных М. Такие М состоят из соединенных друг с другом структурно-элементарных М с характерными кинематическими признаками основных кинематических пар. Схемы структурно-элементарных М с высшими парами изображены на рис. 4.7 и 4.8.
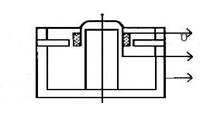
4.4.2. Передаточные отношения цилиндрических, конических и гиперболоидных пар с круговой формой звеньев (рис. 4.7) определяют в соответствии с (3.8) отношением диаметров аксоидов:
i12 = omega1/omega2 = d2/d1 . (4.8)
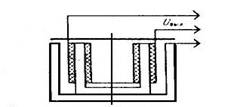
4.4.3. Передаточное отношение многоступенчатого М с последовательным соединением цилиндрических колес (рис. 4.9) :
i12 = omega1/omega2 = dn/d1* (-1) **k, (4.9)
где k - число внешних зацеплений (здесь знак учитывает направление вращения выходного звена по отношению к входному) .
Для последовательно- параллельного соединения колес (рис. 4.10) :
i12 = omega1/omega2 = [ (d2/d1) * (d4/d3) ...
... (dn/dn-1) ]* (-1) **k . (4.10)
Если в М имеются конические и гиперболоидные пары, знак не определяют.
4.4.4. Передаточные отношения аксоидных М с переменными радиусами звеньев (рис. 4.11) определяют по формуле, аналогичной (4.8) :
i12 = omega1/omega2 = ro2/ro1, (4.11)
где ro1 и ro2 - текущие значения радиусов аксоидных поверхностей, при чем ro1 + ro2 = a.
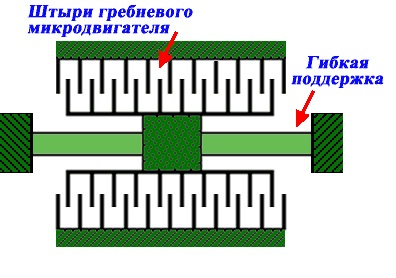
4.4.5. Передаточное отношение М с гибким звеном (рис. 4.12) определяют из условия равенства линейных скоростей в точках касания этого звена с основными жесткими:
i12 = omega1/omega2 = AK2/AK1 . (4.12)
Глава 5. ДИНАМИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
5.1. Задачи анализа; основные понятия и определения.
Задачи динамического анализа:
а) определение усилий, действующих на звенья М при его работе, или силовой анализ;
б) определение законов движения М под действием приложенных усилий, или динамика механизма.
Сила - количественная мера механического взаимодействия тел.
Система сил - совокупность сил, действующих на звено. Система может быть уравновешенной, если под действием ее тело находится в равновесии. Равнодействующая - сила, заменяющая действие системы сил. Момент силы - векторное произведение радиуса-вектора точки приложения силы на саму силу (рис. 5.1) : T = (r) a x F ; плечо силы, создающей момент (расстояние до линии действия силы) : h = (r) a*sin (alfa) .
5.2. Условия равновесия звеньев под действием системы сил.
Звено находится в равновесии, если равнодействующая сила R0 и ее момент T0 равны нулю:
R0 = (Rx**2 + Ry**2 + Rz**2) **0.5 = 0;
T0 = (Tx**2 + Ty**2 + Tz**2) **0.5 = 0. (5.1)
Следовательно, сумма проекций всех сил, действующих на звено, а также сумма проекций моментов этих сил на каждую из координатных осей в отдельности должны равняться нулю:
sum (Fix) = sum (Fiy) = sum (Fiz) = 0;
sum (Tix) = sum (Tiy) = sum (Tiz) = 0. (5.2)
Разновидности уравнений равновесия для плоской системы:
sum (Fix) = 0; sum (Fiy) = 0; sum (Tiz) = 0;
sum (Fix) = 0; sum (Tiy) = 0; sum (Tiz) = 0; (5.3)
sum (Tix) = 0; sum (Tiy) = 0; sum (Tiz) = 0;
5.3. Характеристика усилий, действующих на звенья механизма.
5.3.1. Классификация усилий. Силы и моменты, действующие на звенья М, делят на три группы:
а) внешние силовые воздействия;
б) усилия, возникающие в звеньях вследствие действия ускорений;
в) внутренние усилия в кинематических парах - реакции.
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев