Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Деформации при изгибе
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
10.3. Деформации при изгибе
10.3.1. Дифференциальное уравнение изогнутой оси стержня. Его получают из выражения (10.4), учитывая, что для уравнения изогнутой оси
z = z (x) кривизна может быть выражена соотношением:
kappa = 1/ro = (d2z/dx2) /[1 + (dz/dx) **2]**1.5 .
Поскольку в общем случае изгибающий момент M (x) и момент инерции Jy (x) переменны по длине стержня, уравнение изогнутой оси имеет вид:
(d2z/dx2) /[1 + (dz/dx) **2]**1.5 = M (x)/E*Jy (x) . (10.13)
Для малых прогибов стержня величиной dz/dx = tet - углом поворота стержня пренебрегают и получают приближенное уравнение изогнутой оси стержня при изгибе:
d2z/dx2 = M (x)/E*Jy (x) . (10.14)
10.3.2. Определение деформаций. Большинство методов определения деформаций при изгибе сводится к интегрированию уравнения (10.14), а при необходимости высокой точности результатов - (10.13) с учетом граничных условий. Решения для стержней, нагруженных сосредоточенной силой (рис. 10.8), моментом (рис.10.9), равномерной нагрузкой (рис. 10.10), дают следующие выражения (при Jy = const) :
для силы P
(z)max = - P*l**3/ (3*E*J) ; (tet) max = P*l**2/ (2*E*J) ; (10.15)
для момента M
(z)max = M*l**2/ (E*J) ; (tet) max = - M*l/ (E*J) ; (10.16)
для распределенной нагрузки
(z)max = - q*l**4/ (8*E*J) ; (tet) max = q*l**3/ (6*E*J) . (10.17)
Деформации при сложном нагружении стержня можно представить как сумму деформаций от распределенных нагрузок, сосредоточенных сил и моментов, причем реактивные силы и моменты в опорах рассматривают наравне с другими внешними силовыми факторами.
10.4. Продольный изгиб и устойчивость стержня.
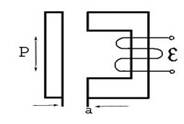
10.4.1. Потеря устойчивости. У продольно сжатых стержней может наступить потеря устойчивости - катастрофическое нарастание деформаций и последующее разрушение под воздействием сил, которые настолько малы, что разрушения от сжатия произойти не может. Это происходит тогда, когда ось стержня имеет первоначальное искривление, или продольная сила действует с эксцентриситетом - появляется изгибающий момент, который разрушает стержень (рис.10.11) .
Уравнение продольного изгиба:
E*J* (d2z/dx2) = M (x) = - P*z . (10.18)
Решение этого уравнения при k = (P/E*J) **0.5 :
z (x) = C1*cos (k*x) + C2*sin (k*x) . (10.19)
Из граничных условий z = 0 при x = l следует: C1 = 0, k*l =
= pi*n, где n = 1, 2, 3 ... Из (10.19) получают выражение для критической силы, вызывающей потерю устойчивости:
(P)кр = E* (J)min* (pi*n/l) **2 . (10.20)
Для n = 1 получают минимальное значение критической силы (P) кр; если ввести промежуточные опоры по длине стержня, можно получить (P) кр при n = 2, 3 и т.д. (рис.10.12) .
10.4.2. Приведенная длина стержня. Влияние закрепления концов на устойчивость учитывают с помощью коэффициента приведения длины mju (рис.
10.13) . В зависимости от характера закрепления концов на длине стержня возникает различное число полуволн синусоиды, что и учитывает коэффициент mju. Поэтому критическая сила
(P)кр = (pi) **2* (E*J) min/ (mju*l) **2 . (10.21)
10.4.3. Гибкость стержня. Формула (10.21) справедлива, пока выполняется закон Гука, т.е. пока критическое напряжение в стержне не превышает предела пропорциональности (sig) пц :
(sig) кр = (P) кр/S = pi**2* (E*J) min/[S* (mju*l) **2 =
= pi**2*E/lam**2 <= (sig) пц, (10.22)
где lam = mju*l/i - гибкость стержня; i = (Jmin/S) **0.5 - наименьший главный радиус инерции сечения стержня.
Предельная гибкость стержня, при которой наступает потеря устойчивости:
(lam) пр >= pi*[E/ (sig) пц]**0.5 . (10.23)
Если lam меньше этого значения, стержень разрушается от сжатия, потери устойчивости не будет. Считают, что для пластичных материалов (sig) кр = (sig) т, для хрупких (sig) кр = (sig) в, если lam < (lam) пр.
10.4.4. Расчет устойчивости. Для оценки устойчивости рассчитывают гибкость стержня lam, и если lam > (lam) пр, определяют критическую силу (P) кр по формуле (10.21), (sig) кр по формуле (10.22) .
Условие устойчивости: (sig) у = (sig) кр/nу, где nу = 1.8 - 3.2 коэффициент запаса по устойчивости.
Глава 11. Контактная прочность. Прочность при переменных нагрузках и сложных видах нагружения.
11.1. Контактная прочность деталей.
11.1.1. Общая характеристика. При контактировании поверхностей, из которых одна или обе криволинейны (теоретически контакт происходит по линии или в точке), возникают контактные напряжения и контактные деформации. Их определяют методами теории упругости, считая, что в контактной зоне образуется в общем случае эллиптическая площадка малых размеров, давление на которой распределяется также по закону эллипса (рис. 11.1) :
q (x,y) = qm*[1 - (x/a) **2 - (y/b) **2]**0.5, (11.1)
где qm - давление в центре площадки с полуосями a и b.
11.1.2. Напряжения в зоне контакта. Значение sig можно найти из условий равновесия:
P = int{int[sig (x,y) *dx*dy]} ; (sig) max = 1.5*P/ (pi*a*b) . (11.2)
Размеры полуосей контакта:
a = alf*[P* (ro) пр/ (E)пр]** (1/3) ;
b = bet*[P* (ro) пр/ (E)пр]** (1/3),
где (ro) пр - приведенный радиус кривизны контактирующих поверхностей (рис.11.2) ; (E) пр - приведенный модуль упругости:
(ro) пр = 4/ (1/ro11 + 1/ro12 + 1/ro21 + 1/ro22 ) ;
(E)пр = (8/3) /{[1 - (nju1) **2]/E1 + [1 - (nju2) **2]/E2} . (11.3)
E1 и E2, nju1 и nju2 - соответственно модули упругости и коэффициенты Пуассона для материалов контактирующих поверхностей; ro11 и ro21, ro12 и ro22 - наибольшие и наименьшие радиусы кривизны.
Коэффициенты alf и bet зависят от взаимной ориентировки главных радиусов кривизны ro11 и ro21 и приведены в справочниках.
Для контакта двух шаров с радиусами R1 и R2 :
(sig) max = 0.578*| P* (1/R +- 1/R) **2/{[1 - (nju1) **2]/E1 +
+ [1 - (nju2) **2]/E2} |** (1/3) . (11.4)
Для цилиндрических поверхностей с параллельными образующими и длиной контактной линии l
(sig) max = 0.564*| P* (1/R +- 1/R) **2/l{[1 - (nju) **2]/E1 + [1 - (nju2) **2]/E2} |** (1/3) . (11.5)
11.1.3. Проверака контактной прочности. Материал в зоне контакта находится в состоянии всестороннего сжатия, поэтому допускаемые напряжения при расчете контактной прочности выше, чем предел прочности при одноосном сжатии (sig) c в 1.5 - 1.8 раза. Для различных материалов допустимые напряжения (sig) кp приведены в справочниках.
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев