Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
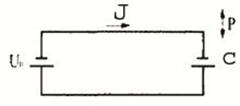
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Пассивные звенья в механизмах
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
2.3. Пассивные звенья в механизмах
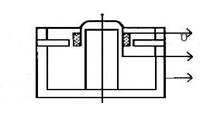
Такие звенья в M дублируют друг друга и вводятся для повышения жесткости конструкции. Пример показан на рис. 2.6, где одно из звеньев 2 или 4 - пассивное и на перемещения остальных звеньев влияния не оказывает. При определениии степени подвижности такие звенья и соответствующие им КП не рассматривают.
2.4. Рациональная структура механизма
М рациональной структуры - это М, не имеющий внутренних пассивных ограничений. Эти ограничения приводят к появлению в М внутренних усилий, которые дополнительно нагружают звенья, КП и вызывают деформацию звеньев и усиленный износ КП, приводят к бесполезным потерям энергии. Пассивные ограничения в М можно найти, использовав уравнение
(2.1) в виде
q = w - 6k + sum[i* (p)i] . (2.3)
Однако в ряде случаев, особенно для многоконтурных М, выражение (2.3) не дает верного результата, так как в нем не учитываются связи между отдельными контурами.
Точно определить пассивные ограничения в М, их характер можно с помощью метода анализа местных подвижностей в КП. Рассматривают все возможные относительные перемещения звеньев в каждой КП, которые должны обеспечить требуемую подвижность звеньев в каждом контуре. Для замыкания любого контура без внутренних усилий необходимы три линейные подвижности вдоль трех произвольно ориентированных непараллельных осей и три угловые вокруг этих осей. Недостающую линейную подвижность по какой-либо оси можно скомпенсировать угловой - поворотом звена вокруг этой оси. Избыток подвижностей в контуре обеспечивает его подвижность, недостаток - пассивные ограничения. Избыточная подвижность в одном контуре может использоваться для компенсации пассивных ограничений в другом, если эта подвижность имеется у звена, входящего в оба контура.
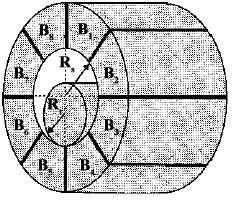
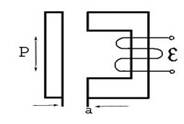
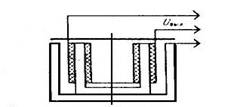
Для М строят таблицу - матрицу подвижностей, где линейные и угловые подвижности обозначают литерами соответствующих КП (рис. 2.7) .
Левая часть матрицы соответствует линейным подвижностям (прямая стрелка), правая - угловым (дугообразная) . В рассматриваемом М линейных подвижностей нет (нули в левой части матрицы), угловых - 6 (обозначены литерами КП в правой части) . Избыток угловых подвижностей вокруг оси Y позволяет компенсировать недостаток линейных вдоль осей X и Z, что изображено зигзагообразными стрелками с обозначением звеньев CD и BC, поворот которых обеспечивает линейные подвижности; первой указывают литеру КП, угловая подвижность в которой использована для компенсации.
Степень подвижности рассматриваемого М w = 1, число пассивных ограничений q = 1 (невозможны перемещения по оси Y). Рациональной структуру этого М можно сделать, заменив любую из его КП такой, которая обеспечивает линейную подвижность вдоль оси Y, или дополнительную угловую вокруг осей X или Z .
Глава 3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
3.1. Основные понятия и определения. Задачи кинематического анализа.
3.1.1. Кинематические параметры - положение звена относительно системы координат, его скорость и ускорение. Кинематические характеристики - функции, связывающие в М параметры движения ведущего звена с параметрами движения ведомого.
3.1.2. Кинематический анализ - раздел теории М, в котором изучают движение звеньев в М, однако причины, вызывающие движение, не рассматриваются.
Задачи кинематического анализа:
а) определение кинематических параметров звеньев М и их характер ных точек;
б) определение кинематических характеристик М.
3.2. Основные виды движения звеньев
3.2.1. Основные виды движения:
а) поступательное;
б) вращательное;
в) сложное.
Последний - общий случай движения, которое может быть представлено суммой поступательного и вращательного или как последовательность мгновенных вращательных движений.
3.2.2. Поступательное движение. Твердое тело или звено перемещается так, что любая прямая, связанная с телом, остается параллельной своему первоначальному положению (рис. 3.1) . Перемещения, скорости и ускорения всех точек звена соответственно одинаковы. Если положения любых двух точек (например, A и В) определить векторами (r) a и (r) b, то при движении вектор (r) ab = AB не меняется, т.е. скорости (v) a и (v) b равны; также равны и ускорения (w) a и (w) b .
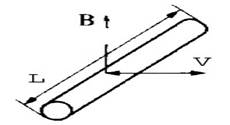
3.2.3. Вращательное движение. Все точки звена движутся по круговым траекториям в параллельных плоскостях, а центры этих окружностей находятся на общей оси вращения (рис. 3.2) .
Вращение характеризуется угловой скоростью omega = dfi/dr и угловым ускорением eps = domega/dtau. Линейная скорость точки при вращательном движении v = (dfi/dtau) x r = omega x r . Линейное ускорение:
w = dv/dtau = (domega/dtau) x r + omega x (dr/dtau) = eps x r + omega x omega x r = (w) t + (w) n . (3.1)
Вектор тангенциального ускорения (w) t направлен по касательной к траектории движения, нормального w (n) - к центру вращения.
Модуль вектора полного ускорения
w = [ (eps*ro) **2 + ( (omega**2) *ro) **2]**0.5 = ro*[eps**2 + omega**4]**0.5, (3.2)
где ro - радиус вращения.
3.2.4. Сложное движение звена. Его обычно представляют суммой двух более простых движений: относительного в подвижной системе координат K' и переносного вместе с этой системой относительно системы координат K, которая обычно неподвижна (рис. 3.3) .
3.2.5. Скорости и ускорения при сложном движении. При сложном (абсолютном) движении приращение вектора скорости (v) a:
d (v)a = d (v)o + dfi x r' + (v) r*dtau,
следовательно, абсолютная скорость (v) a есть сумма переносной (v) e и относительной (v) r скоростей:
(v)a = (v) o + omega x r' + (v) r = (v) e + (v) r . (3.3)
Приращение вектора ускорения при сложном движении:
d (w)a = d (w)o + d (omega x r') + dfi x (v) r + (w) r*dtau ;
d (omega x r') = eps x r' + omega x omega x r' + omega x (v) r ;
dfi x (v) r = omega x (v) r.
Таким образом, ускорение при сложном движении
(w)a = (w) o + eps x r' + omega x omega x r' + 2*omega x (v) r + (w) r. (3.4)
Составляющие абсолютного ускорения:
(w)e = (w) o + eps x r' + omega x omega x r' - переносное ускорение;
(w)k = 2*omega x (v) r - ускорение Кориолиса;
(w)r - относительное ускорение.
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев