Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
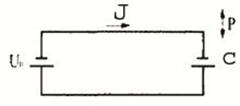
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Методы определения реакций в кинематических парах
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
6.1. Методы определения реакций в кинематических парах.
6.1.1. Сущность метода определения реакций. Для большинства методов она сводится к составлению и решению уравнений равновесия для каждого звена, в которые реакции входят как неизвестные. Внешние силы, скорость и ускорение для всех звеньев М должны быть известны; определяют реакции и движущие усилия на ведущем звене М. Инерционные силы учитываются на основе принципа д'Аламбера: в каждое мгновение движения любое тело можно рассматривать находящимся в равновесии под действием системы сил, в которую входят и силы инерции.
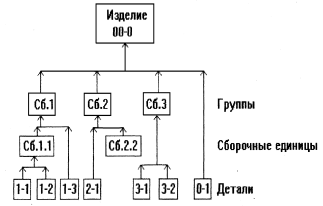
6.1.2. Аналитический метод определения реакций. Механизм условно расчленяют на звенья, нагружая каждое внешними усилиями, а в кинематических парах - неизвестными составляющими реакций (рис. 6.1.) . Систему уравнений равновесия для одного звена решить нельзя, так как число неизвестных больше числа уравнений, поэтому звенья обьединяют в статически определимые группы, для которых выполняется условие sum[i*p (i)] -qs =6k.
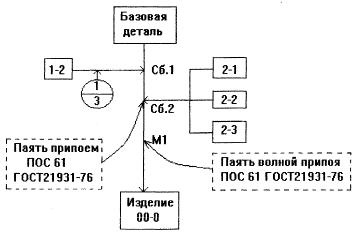
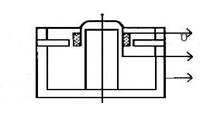
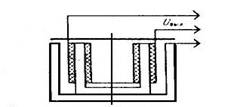
Пример расчленения M на группы показан на рис. 6.2, а схема определения реакций в группе - на рис.6.3.
Уравнения равновесия для обоих звеньев группы:
sum (Fix) = Rb''*cos (fi2) - Rb'*sin (fi2) - F2*cos (alf2) - F3*cos (alf3) - Rd*sin (fit) = 0;
sum (Fiy) = Rb''*sin (fi2) - Rb'*cos (fi2) - F2*sin (alf2) - F3*sin (alf3) - Rd*cos (fit) = 0;
sum (T2c) = Rb'*l2 - F2*l2s*cos (pi/2 - alf2 + fi2) - T2 = 0;
sum (T3c) = F3*l3'*cos (pi/2 - alf3 + fi3) - T3 - Rd*sin (fit) *h3y +
+ Rd*cos (fit) *h3x = 0.
Решение системы позволяет найти реакции Rb, Rc и Rd и их составляющие.
6.1.3. Графоаналитический метод планов сил. Уравнения статики решают графическим построением плана сил - векторной диаграммы, на которой силы представлены векторами. План сил для группы звеньев показан на рис. 6.3, в. Составляющую реакции Rb' и плечо h3x для реакции Rd находят так же, как и при аналитическом решении.
6.2. Расчет сил и моментов трения.
6.2.1. Силы трения - касательные составляющие реакций - находят по приведенным коэффициентам трения f' = tg (fit), если известны полные реакции в кинематических парах или их нормальные составляющие.
Последовательность определения приведенных коэффициентов трения:
а) из условия равновесия находят нормальные составляющие реакций наконтактных поверхностях;
б) по известным коэффициентам трения на плоских поверхностях рассчи тывают силы трения на реальных поверхностях;
в) из условий равновесия определяют силы движущие;
г) находят приведенный коэффициент трения как отношение движущего уси лия к усилию, сжимающему поверхности звеньев в паре.
6.2.2. Приведенные коэффициенты трения для кинематических пар с трением скольжения:
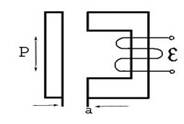
а) клиновидная направляющая прямолинейного движения (рис. 6.4) :
f' = f*[cos (alf1) + cos (alf2) ]/[sin (alf1 + alf2) ], (6.1)
частный случай: alf1 = alf2 = alfa, f' = f/sin (alfa) ;
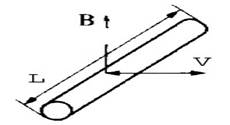
б) цилиндрическая направляющая для прямолинейного или вращательногодвижения (рис.6.5) - для произвольного распределения давления по цилиндрической поверхности q = q (fi) :
f' = f{int[q (fi) *dfi]0, alfa}/{int[q (fi) *cos (fi) *dfi]0, alfa}, (6.2)
при q (fi) = q0*cos (fi) и alfa = Pi/2 f' = 4f/Pi ;
в) трение на торцовой поверхности цилиндра (рис. 6.6) :
f' = 1.333*f* (R**2 + R*r + r**2) / (R+ r) **2 ; (6.3)
г) трение в винтовой паре (рис. 6.7):
для прямоугольной резьбы:
T = 0.5*Q*d*f' ; f' = tg (gamma + fit) ; (6.4)
для трапецевидной и треугольной резьб:
f' = tg[gamma + arc tg (f/sin (alfa) )] ; (6.5)
самоторможение в винтовой паре наступает при gamma < fit; в этом случае сила Q не сможет заставить винт вращаться.
6.2.3. Приведенные коэффициенты трения для кинематических пар с трением качения:
а) платформа на катках (рис. 6.8) :
f' = (k1 + k2 )/d ; (6.6)
б) подшипник качения (рис. 6.9) :
T = 0.5*Q*fs*d1; f' = beta*k* (1+ d1/d3) /d1 ; (6.7)
для реальных конструкций подшипников beta = 1.4 - 1.6.
6.3. Коэффициенты полезного действия механизмов.
6.3.1. Коэффициент полезного действия - отношение полезной мощности на выходе Nn к мощности движущего усилия на входе Nд : eta = Nn/Nд . Характеризует совершенство M и потери в нем, которые происходят за счет сил трения Nт = Nд - Nn :
eta = 1 - Nт/Nд . (6.8)
Мощности потерь в кинематических парах: поступательной Nт = Fт*vs, вращательной Nт = Tт*omegas ; vs и omegas - относительные скорости звеньев.
Сложный M можно представить как соединение более простых и КПД определять по КПД простых M, входящих в сложный.
6.3.2. КПД при последовательном соединении простых M (рис. 6.10, а) :
eta1m = Nnm/Nд = eta1*eta2...etam . (6.9)
В такой цепи общий КПД меньше минимального частного КПД.
6.3.3. КПД при параллельном соединении простых M (рис.6.10, б) :
eta1m = Nnsum/Nд = k1*eta1 + k2*eta2 + ... + km*etam, (6.10)
где k1, k2, ... km -коэффициенты, показывающие, какая часть общей мощности подведена к каждому простому M ; k1 + k2 + ... + km = 1.
В такой цепи общий КПД определяется в основном частным КПД M, через который проходит наибольшая мощность.
6.3.4. КПД при параллельно-последовательном соединении M (рис. 6.10, в) :
eta = k1*eta1m*eta2m...+ k2*eta1n*eta2n...etann +...
...+ kp*eta1p*eta2p...etapp, (6.11)
где коэффициенты ki учитывают распределение мощности по цепям;
etaij - частные КПД простых M .
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев