Пассивные звенья в механизмах
Аксоидные поверхности
Соотношение скоростей в высших кинематических парах
Внешние усилия: движущие и сопротивления. Работа движущих усилий dA = F*ds положительна, сопротивлений - отрицательна (рис
Методы определения реакций в кинематических парах
Определение закона движения механизма
Движение при однократном первоначальном импульсе силы F и силе упругого сопротивления, пропорциональной смещению: Fc = k*x:
Экспериментальное определение механических параметров материалов
Геометрические характеристики сечений при кручении
Деформации при изгибе
Прочность при повторно-переменных нагрузках
Функциональная взаимозаменяемость при производстве изделий
Аналитические методы определения погрешностей
Навигация
Определение закона движения механизма
Механизмы и несущие конструкции радиоэлектронных средств
90988
знаков
0
таблиц
0
изображений
6.4. Определение закона движения механизма.
6.4.1. Динамика - раздел динамического анализа, посвященный определению законов движения звеньев M. Закон движения - зависимость кинематических параметров от времени:
s = s (tau) ; v = v (tau) ; w = w (tau) ;
fi = fi (tau) ; omega = omega (tau) ; eps=eps (tau) ; (6.12)
где s, v, w - линейные, fi, omega, eps - угловые параметры движения.
Сущность метода определение законов движения звеньев и всего M сводится к интегрированию дифференциальных уравнений
F = m* (d2s/dtau2) или T = J* (d2fi/dtau2), являющихся выражением второго закона механики (закона Ньютона) .
Особенность определения законов движения звеньев:
а) многочисленность звеньев в сложных M, поэтому для каждого звена могут быть свои законы движения;
б/ связанность звеньев и следовательно, их движений.
6.4.2. Определение закона движения звена приведения. Чтобы оперировать минимальным числом параметров, в механизме выделяют звено приведения - какое-либо из звеньев, характер движения которого простейший: движение это прямолинейное или вращательное. Влияние массовых характеристик остальных звеньев и действующих на них усилий учитывают с помощью приведенных параметров, значения которых определяют из условий энергетической эквивалентности звена приведения и всего М. Это значит, что энергия и характер ее изменения для звена приведения и для всего M в каждый момент времени одинаковы.
6.4.3. Приведенные массовые характеристики. При поступательном движении звена приведения со скоростью (v) пр приведенную массу (m) пр находят из условия равенства кинематических энергий звена и всего M, в котором массы mi совершают поступательные движения со скоростями vi, а моменты инерции Jk - вращательные со скоростями omegak :
(m)пр = sum{ mi*[vi/ (v)пр]**2 } + sum{ Jk*[omegak/ (v)пр]**2 }. (6.13)
Соотношения vi/ (v)пр и omegak/ (v)пр представляют собой функции скорости для звеньев M, определенные по отношению к звену приведения, поэтому приведенная масса - переменная величина, определяемая функцией положения M - формой и размерами звеньев и их взаимными положениями.
Если звено приведения вращается со скоростью (omega) пр, оно должно обладать приведенным моментом инерции
(J)пр = sum{ mi*[vi/ (omega) пр]**2 } +
+ sum{ Jk*[omegak/ (omega) пр]**2 }, (6.14)
который также определяется функцией положения.
6.4.4. Приведенные силовые характеристики. Это - приведенная сила и приведенный момент, определяемый из условий равенства мощностей на звене приведения и во всем M . Приведенная сила
(F)пр = sum{ Fi*[vi/ (v)пр]**2 } + sum{ Tk*[omegak/ (v)пр]**2 }; (6.15)
приведенный момент
(T)пр = sum{ Fi*[vi/ (omega) пр]**2 } +
+ sum{ Tk*[omegak/ (omega) пр]**2 }; (6.16)
6.4.5. Уравнение движения звена приведения. Может быть получено из условия эквивалентности изменения энергии и работы на некотором элементарном перемещении (обычно учитывают только кинетическую энергию E подвижных звеньев) :
dA = dE = T*dfi ; dA = dE = F*ds,
где dA - элементарная работа на элементарном перемещении dfi или ds,
T - момент движущих сил, F - движущая сила.
Для звена приведения (при вращательном движении) :
d[ (E)пр]/d (fi) пр = (T) пр = d[ (J)пр* (omega) пр**2/2]/d (fi) пр .
Приведенный момент инерции (J) пр зависит от (fi) пр, поэтому
d[ (E)пр]/d (fi) пр = 0.5*{ d (J)пр/d (fi) пр* (omega) пр**2 } +
+ (J) пр* (omega) пр*d (omega) пр/d (fi) пр =
= 0.5*{ d (J)пр/d (fi) пр* (omega) пр**2 } +
+ (J) пр*[d (omega) пр/dtau] .
Момент приведенной силы (T) пр представляют как сумму движущего момента (T) д и момента сил сопротивления (T) с :
(J)пр*[d2 (fi) пр/dtau2] + 0.5*{ d (J)пр/d (fi) пр* (omega) пр**2 } =
= [ (T)д + (T) с]пр . (6.17)
Это - уравнение движения M в форме моментов - для вращательного движения приведенного звена. Соответствующее выражение для поступательного движения - уравнение движения в форме сил:
(m)пр*[d2 (s)пр/dtau2] + 0.5*{ d (m)пр/d (s)пр) * (v)пр**2 } =
= [ (F)д + (F) с]пр . (6.18)
Уравнения (6.17) и (6.18) могут быть проинтегрированы, если известны конкретные выражения для массовых и силовых приведенных характеристик.
6.4.6. Законы движения остальных звеньев. Могут быть определены, если уравнения движения решены и для звена приведения получены зависимости типа (6.12) ; с помощью кинематических характеристик - функций положения, скорости и ускорения для М осуществляют переход к кинематическим параметрам, и, следовательно, к законам движения всех звеньев.
6.5. Колебательные процессы в М .
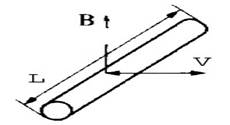
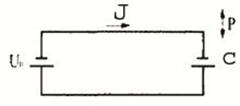
6.5.1. Периодические силы возникают в М как результат вращательного движения звеньев вокруг осей, не проходящих через центр масс. В подобных случаях инерционную силу (F) и = m*r*omega**2 ( рис. 6.11 ) можно представить в виде суммы двух составляющих Fx = (F) и*sin (fi) и Fz =(F) и*cos (fi), и если omega = d (fi) /dtau, то Fx и Fz будут периодическими силами . Воздействия таких сил приводят к возникновению в механических системах колебательных (вибрационных) процессов.
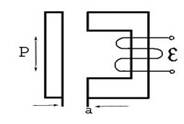
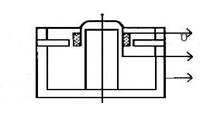
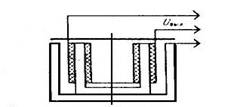
6.5.2. Параметры колебательных процессов процессов получают, рассматривая движение физического тела относительно осей выбранной неподвижной системы координат. Тело массой m связано упругими связями с основанием, которое может быть неподвижно, и в этом случае колебательное движение вызывается непосредственным воздействием периодической силы на тело (силовое возбуждение), или само основание может периодически смещаться и передавать силовое воздействие на тело через упругую связь (кинематическое возбуждение) . Расчетные схемы приведены на рис. 6.12, а уравнение движения тела, в соответствии с (6.18) :
m*x" = F (tau) - Fс, (6.19)
где F (tau) - внешняя периодическая сила, Fc - сила сопротивления,
x" - линейное ускорение при движенни вдоль оси x .
Похожие работы

... . Всё вышеуказанное объединяется в ёмкое понятие CAE - Computer AidedEngineering. Специфические характеристики и различия между проектированием, производством и применением микросистем по сравнению с традиционными (макро) реализациями вытекают из их размеров. Микросистемная технология непригодна для производства опытных образцов. Если схема производства для массового производства по групповой ...
... ; · транзисторы; · разьемы; 4) пайка 5) очистка ПП; 6) маркировка; 7) контроль; 8) настройка. Разработанная технология сборки приведена в приложении. Заключение В результате работы над курсовым проектом была разработана конструкция прибора измерителя емкости, которая полностью отвечает современным эргономическим, массогабаритным и функциональным требованиям, а также другим ...
... т.е. для защиты источника от утечки информации, требуется нарушение энергетических и временных условий существования канала утечки путем использования различных по физическим принципам средств защиты. Технические характеристики акустопреобразовательного канала Акустоэлектрический преобразователь-устройство, преобразующее электромагнитную энергию в энергию упругих волн в среде и обратно. В ...
... операции в процессе производства РЭА; е) значительно расширить класс принципиально осуществимых по сложности проектов, как, например, устройств на БИС и т. д. Основной целью создания систем автоматизации проектирования РЭА, представляющих собой сложные человеко-машинные комплексы, является эффективное использование характерных особенностей каждой стороны, участвующей в процессе разработки РЭА ...
0 комментариев